
3軸 姿勢制御モジュール SHISEIGYO-3 ESP32とMPU6050の使用 ーリアクションホイールへの道22ー
本記事にはアフィリエイト広告が含まれます。
以前 M5Stack CORE2単体でブラシレスモータを制御して短時間ではありますが点倒立を実現しました。
しかし誤ってM5Stack CORE2を過電圧印可で破壊してしまい、これまでは物理ブレーキシステムの検討を行っておりました。
ここでは、M5Stack CORE2の代わりにESP32評価ボードと6軸モーションセンサMPU6050を用いてみましたので報告させていただきます。
目次
ESP32の利用
物理ブレーキシステムの検討もある程度メドがついたので、
そろそろどうしても点倒立の検討を行いたくなってしまいました。
いつ手に入るか分からないM5Stack CORE2 を待つのが耐えられず
手が震え、意識も途絶えだしたので
ESP32とMPU6050でSHISEIGYO-3を検討してみようかとMPU6050ならより高級な姿勢角が得られそうだし pic.twitter.com/7hL9Yukauz
— HomeMadeGarbage (@H0meMadeGarbage) November 23, 2020
ということでESP32評価ボードと6軸モーションセンサMPU6050でSHISEIGYO-3を構築することにしました。
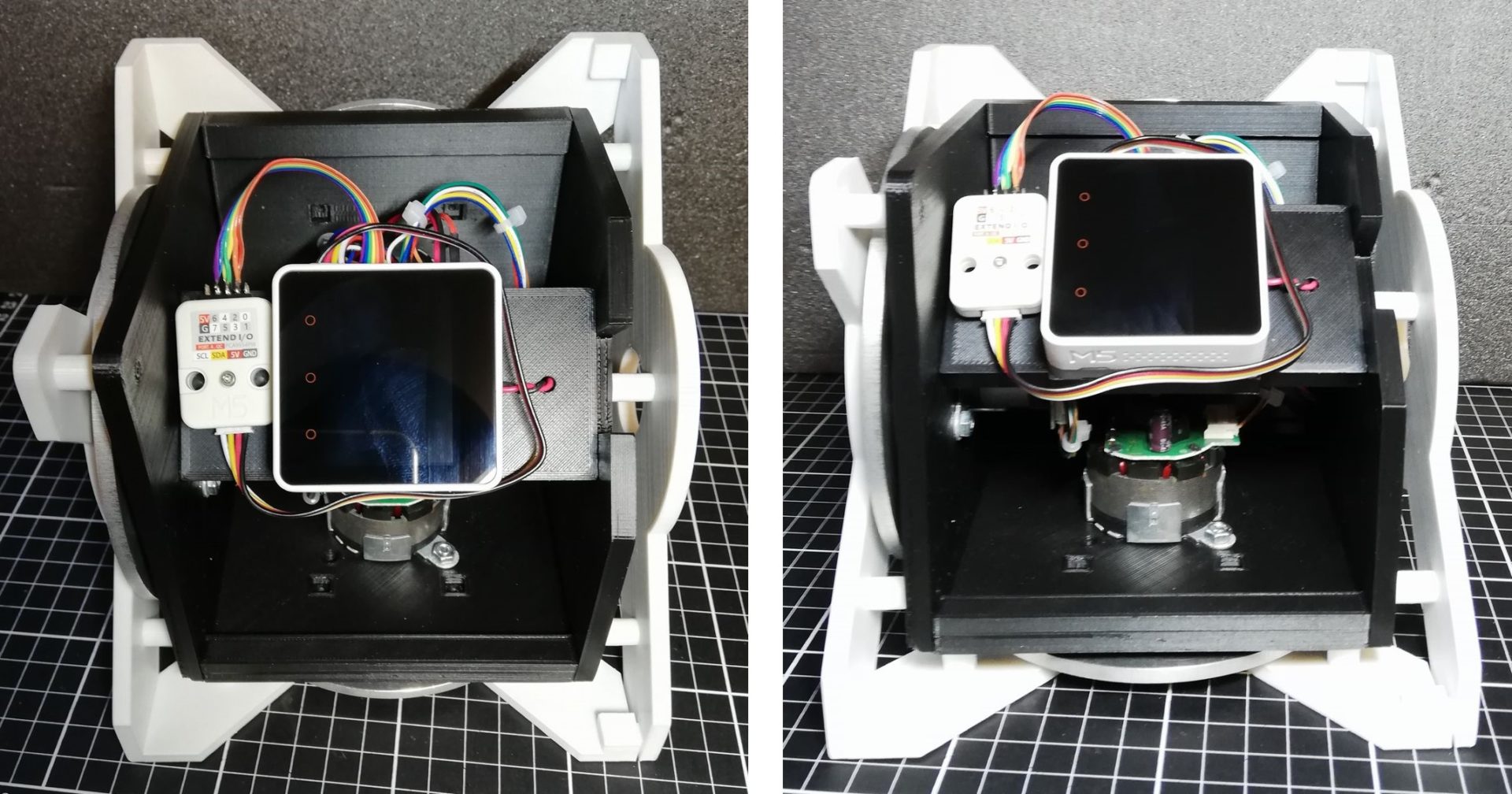
構成
ESP32評価ボードはM5Stack CORE2のように周辺部品がないので
ピンが潤沢にありモータ3つでも余裕で接続できました。
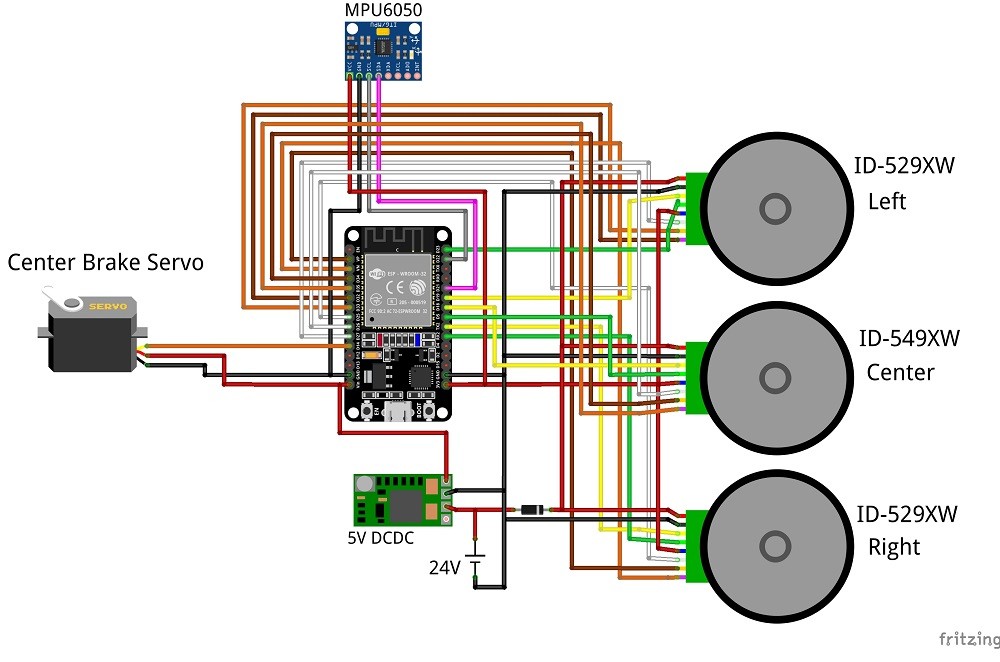
3つしか所有していないショートブラシレスモータID-529XWを1つ燃やしてしまったので、
真中モータをロングバージョンのID-549XWを使用しています(もうボロボロの状態でこの道を進んでおります。。。)

ちょっとディスプレイがないのが寂しいですが。。。
MPU6050のArduinoライブラリは以下を使用しました。
https://github.com/ElectronicCats/mpu6050
MPU6050のDMP (Digital Motion Processor)は使用せずに これまで同様、
加速度センサとジャイロの生データをカルマン・フィルタかけて姿勢角と角速度を導出しました。
参考
動作
ESP32でも以前 確立した座標変換による制御でMPU6050ひとつでもモータ3つ制御して辺倒立が実現できております。
点倒立はあいかわらず回転してしまうので長時間できません。
おわりに
やっとこれで点倒立の安定性向上に向けて検討が開始できます!
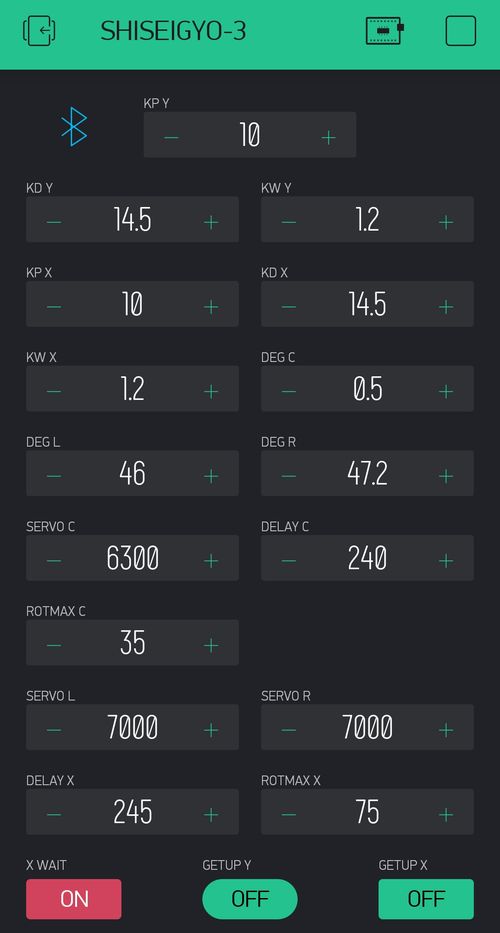
パラメータ調整はスマホアプリBlynkをもちいてESP32とBLEで通信して実施する予定です。
ごっそりパラメータあるのでこれまた時間かかりそうです。。。
果たして安定点倒立は実現されるのでしょうか?
それでは次の道でお会いしましょう。
次の記事

関連記事
 3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
 3軸 姿勢制御モジュール SHISEIGYO-3 起き上がり点倒立達成 ーリアクションホイールへの道24ー
3軸 姿勢制御モジュール SHISEIGYO-3 起き上がり点倒立達成 ーリアクションホイールへの道24ー
 3軸 姿勢制御モジュール SHISEIGYO-3 への挑戦そして挫折 ーリアクションホイールへの道16ー
3軸 姿勢制御モジュール SHISEIGYO-3 への挑戦そして挫折 ーリアクションホイールへの道16ー
 3軸 姿勢制御モジュール SHISEIGYO-3 点倒立の実現 ーリアクションホイールへの道17ー
3軸 姿勢制御モジュール SHISEIGYO-3 点倒立の実現 ーリアクションホイールへの道17ー
 3軸 姿勢制御モジュール SHISEIGYO-3 マイコン削減 ーリアクションホイールへの道19ー
3軸 姿勢制御モジュール SHISEIGYO-3 マイコン削減 ーリアクションホイールへの道19ー
 SHISEIGYO-2 を改良しました ーリアクションホイールへの道36ー
SHISEIGYO-2 を改良しました ーリアクションホイールへの道36ー
 SHISEIGYO-2 Go 爆誕 ーリアクションホイールへの道39ー
SHISEIGYO-2 Go 爆誕 ーリアクションホイールへの道39ー
 SHISEIGYO-2 Go 球体ホイールを検討 ーリアクションホイールへの道41ー
SHISEIGYO-2 Go 球体ホイールを検討 ーリアクションホイールへの道41ー