3軸 姿勢制御モジュール SHISEIGYO-3 物理ブレーキ検討2 ーリアクションホイールへの道21ー
本記事にはアフィリエイト広告が含まれます。
前回はTPUフィラメントを用いてバンドブレーキを製作し、起き上がり倒立を実現しました。
ここでは前回の課題となったモータを3つ筐体に実装した状態での起き上がり辺倒立を目指します。
目次
起き上がり辺倒立
モータ1個を実装した状態ではロングモータ(ID-549XW)でもショートモータ(ID-529XW)でも起き上がり辺倒立が確実にできるようになりました。
【物理ブレーキシステム】
ロングモータで9割くらいの確度で立つようになった。
ショートモータでの確認や
モータ3個実装での起き上がり倒立可能か確認進めます。#リアクションホイールへの道#M5stack #姿勢制御モジュール#Blynk pic.twitter.com/xyncwxRK15— HomeMadeGarbage (@H0meMadeGarbage) November 21, 2020
しかし、残りのモータを実装すると重量が増し高速(24V)状態でブレーキングしても起き上がれなくなってしまいました。。
残り2個のモータとホイール実装したら
24V最速でブレーキかけても起きれなくなった。。ロングモータに変えても起き上がれない。。。
さてどうする?3連休は始まったばかりだ。#リアクションホイールへの道 pic.twitter.com/JBZuWugSsh
— HomeMadeGarbage (@H0meMadeGarbage) November 21, 2020
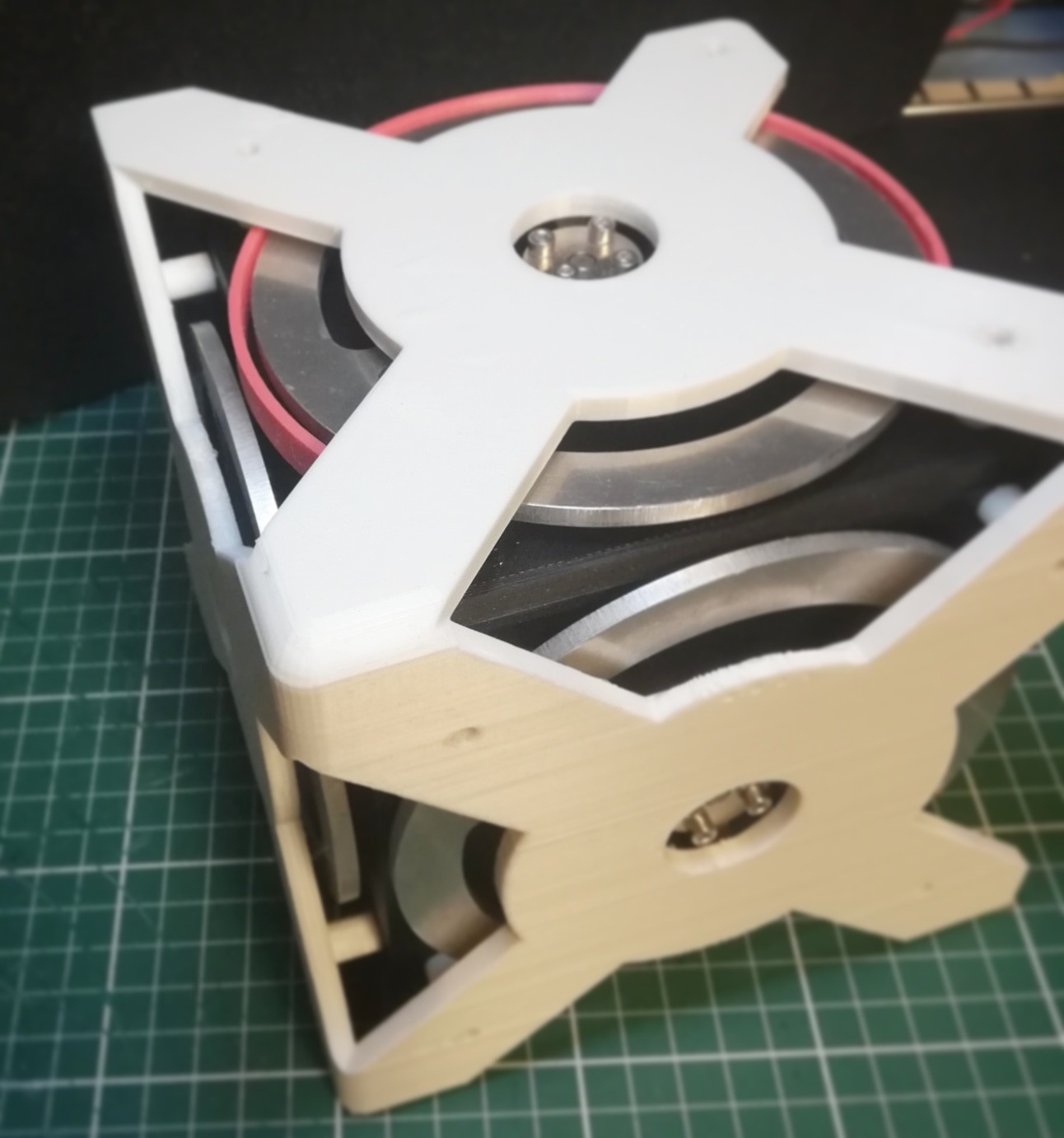
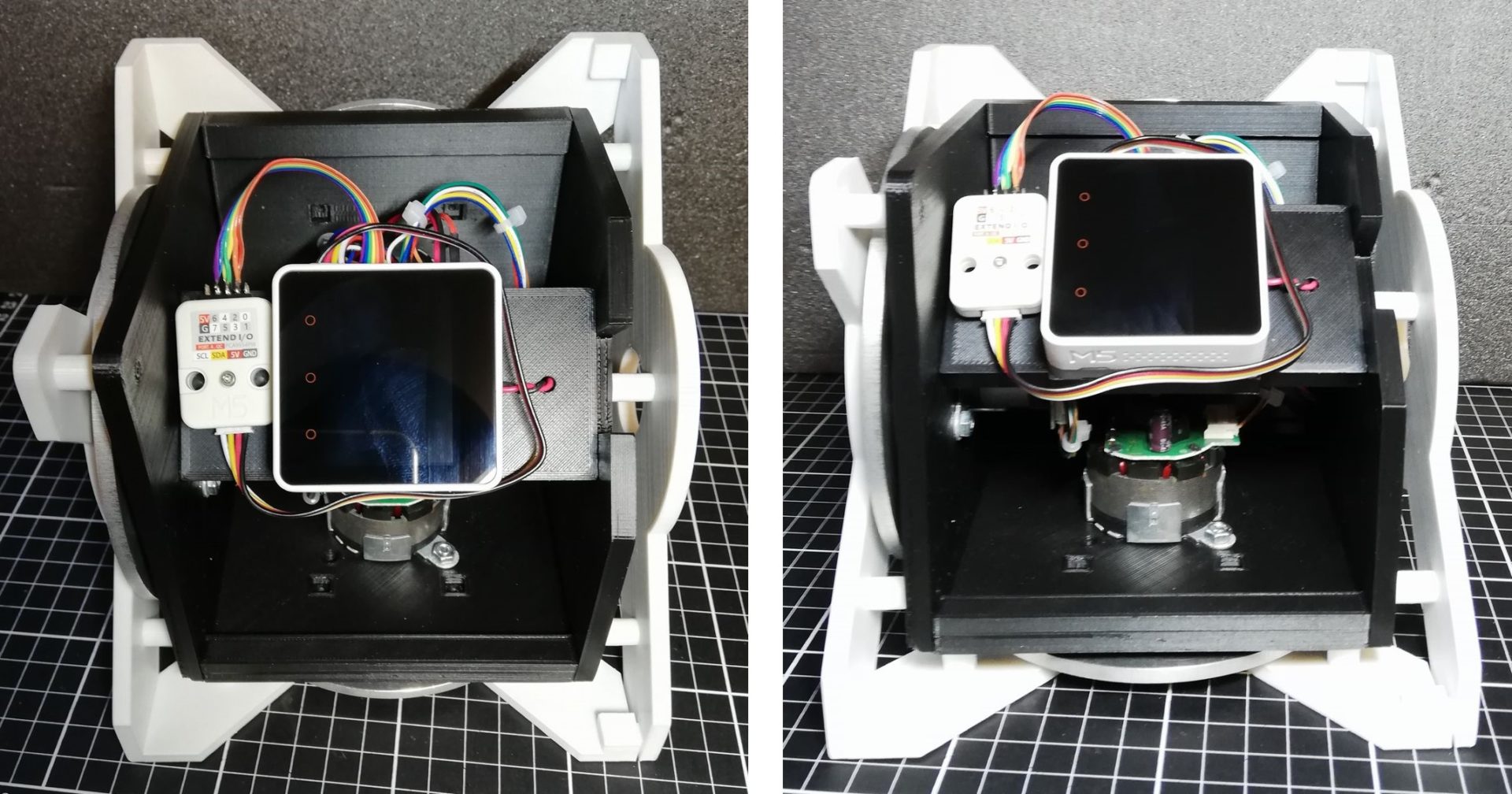
筐体加工
SHISEIGYO-1と同様に倒立するエッジをφ6mmで丸めて再出力してみました。
やっと でけた pic.twitter.com/ku1jUL1ejB
— HomeMadeGarbage (@H0meMadeGarbage) November 22, 2020
動作
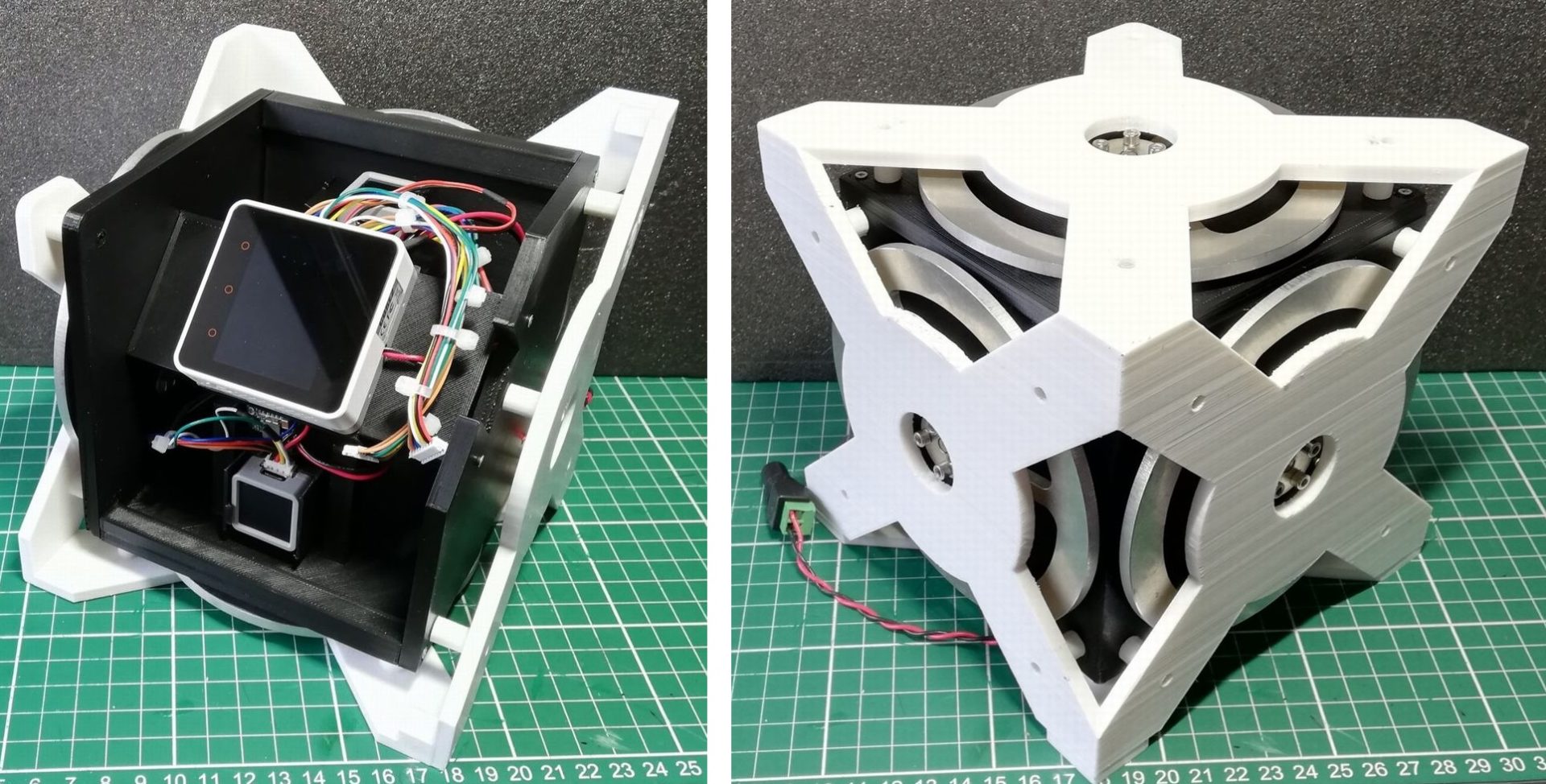
新筐体でショートモータ3つ実装した状態で起き上がり動作を試してみました。
無事に起き上がり辺倒立が実現されました!!
エッジ丸めるだけでだいぶ変わるんですね。
最初から丸めとくべきだった。。
おわりに
SHISEIGYO-3で起き上がり辺倒立が達成できたので次は安定点倒立を実現させて、
起き上がり点倒立を試してみたいと思います。
それではまた次の道で!!
追記
モジュールの総重量 (20/11/23)
どうもこのバンドブレーキではモジュールの総重量が990gを超えると起き上がれないということがわかりました。
筐体の後ろの部品を両方付けると
起き上がれなくなるいずれも40gほどで
このブレーキで起き上がるには
総重量990gを超えるとダメだということが分かりました。マイコンM5Stack CORE2にしたり
サーボあと2個つけないといけなきので
肉抜きしなくては。。。 pic.twitter.com/H5wBBeXzbF— HomeMadeGarbage (@H0meMadeGarbage) November 22, 2020
内側の筐体の裏面を肉抜き加工して3Dプリントしてみました。

肉抜き加工で軽量化でき外側の筐体を全部つけても無事倒立できました!
肉抜き加工が功を奏して
外側筐体全部付けても立てるようになった(。・ω・)ノ pic.twitter.com/hguIkDY7Wl— HomeMadeGarbage (@H0meMadeGarbage) November 23, 2020
以後はモジュールの総重量にも配慮して製作進めていきます。
次の記事

関連記事
 3軸 姿勢制御モジュール SHISEIGYO-3 への挑戦そして挫折 ーリアクションホイールへの道16ー
3軸 姿勢制御モジュール SHISEIGYO-3 への挑戦そして挫折 ーリアクションホイールへの道16ー
 3軸 姿勢制御モジュール SHISEIGYO-3 点倒立の実現 ーリアクションホイールへの道17ー
3軸 姿勢制御モジュール SHISEIGYO-3 点倒立の実現 ーリアクションホイールへの道17ー
 3軸 姿勢制御モジュール SHISEIGYO-3 筐体検討 ーリアクションホイールへの道18ー
3軸 姿勢制御モジュール SHISEIGYO-3 筐体検討 ーリアクションホイールへの道18ー
 3軸 姿勢制御モジュール SHISEIGYO-3 マイコン削減 ーリアクションホイールへの道19ー
3軸 姿勢制御モジュール SHISEIGYO-3 マイコン削減 ーリアクションホイールへの道19ー
 3軸 姿勢制御モジュール SHISEIGYO-3 物理ブレーキ検討 ーリアクションホイールへの道20ー
3軸 姿勢制御モジュール SHISEIGYO-3 物理ブレーキ検討 ーリアクションホイールへの道20ー
 3軸 姿勢制御モジュール SHISEIGYO-3 ESP32とMPU6050の使用 ーリアクションホイールへの道22ー
3軸 姿勢制御モジュール SHISEIGYO-3 ESP32とMPU6050の使用 ーリアクションホイールへの道22ー
 3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
 3軸 姿勢制御モジュール SHISEIGYO-3 起き上がり点倒立達成 ーリアクションホイールへの道24ー
3軸 姿勢制御モジュール SHISEIGYO-3 起き上がり点倒立達成 ーリアクションホイールへの道24ー