3軸 姿勢制御モジュール SHISEIGYO-3 筐体検討 ーリアクションホイールへの道18ー
本記事にはアフィリエイト広告が含まれます。
前回はブラシレスモータ3つを独立に制御することでのSHISEIGYO-3 の点倒立を確認いたしました。
それに伴い 課題も見つかりました。
目次
課題
前回の課題をまとめます。
- 筐体検討
ホイールむき出しで危険なので筐体設計が必要となります。
- 点倒立安定性向上
前回は長時間の点倒立ができていなかったので安定性向上を目指します。 - マイコン削減
現状はM5Stack Core2ひとつとATOM Matrix 2個でモータ3つをそれぞれ制御しています。
M5Stack Core2ひとつだけでのモータ3つ独立制御を目指します。 - 起き上がり点倒立
物理ブレーキの有無含め、起き上がり点倒立の実現を目指します。
ここでは筐体検討ついて実施しましたので報告いたします。
筐体検討
ホイールむき出してほとんど凶器と化したので筐体を検討しました。

下に敷いていたカッターマットはズタズタになってしまいました。。。

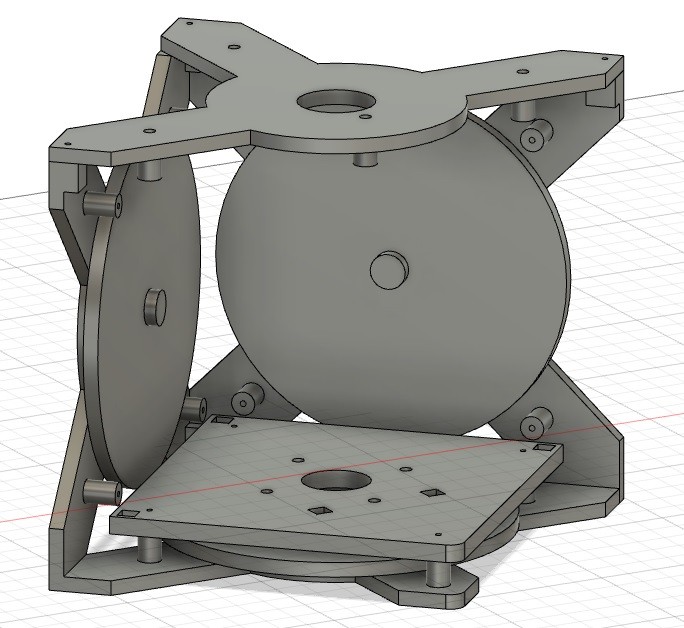
筐体は 荒miuさんの非常にカッコいいモジュールを参考に設計してみました。
外部電源レスで起き上がり倒立ができるように。@H0meMadeGarbage さんのSHISEIGYO-1のクローンは完了したので、バッテリー乗るような設計で作り直してみました。#リアクションホイールへの道 https://t.co/dwpDJuMPdh pic.twitter.com/GTMD9JdnwH
— 荒miu (三浦 琢) (@miu_robo) September 20, 2020
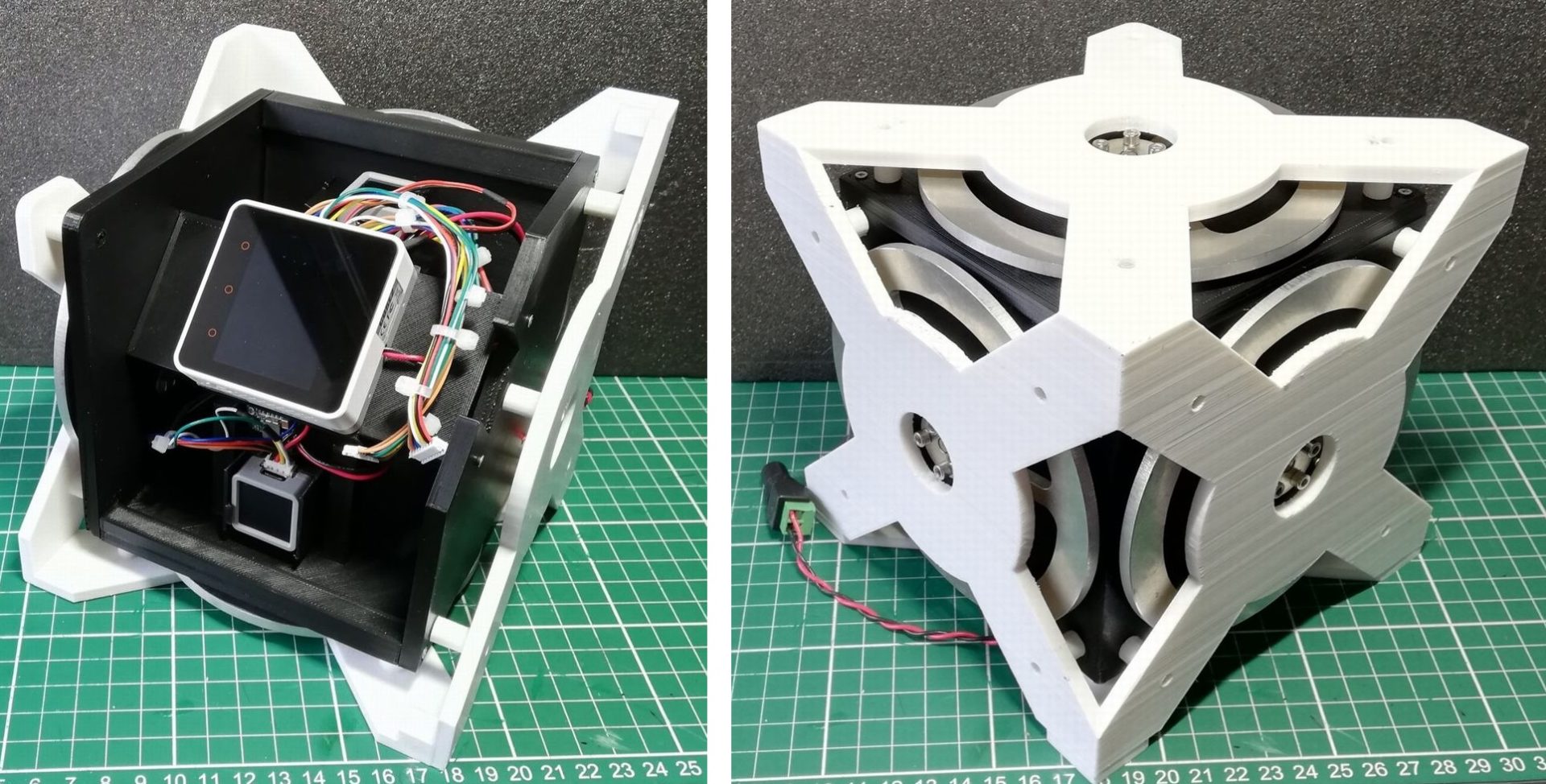
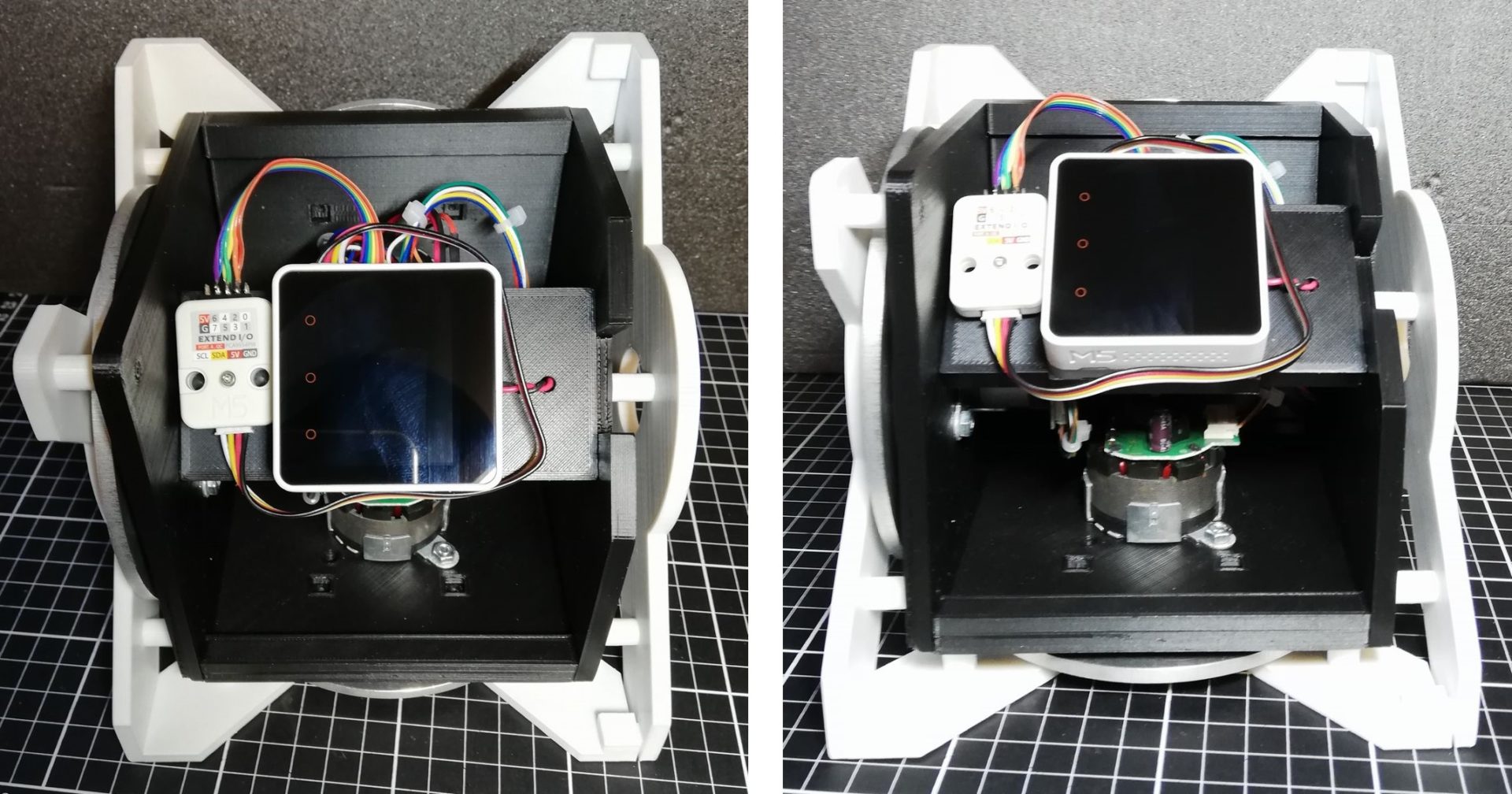
3つのホイールを覆うように外から外装を追加します
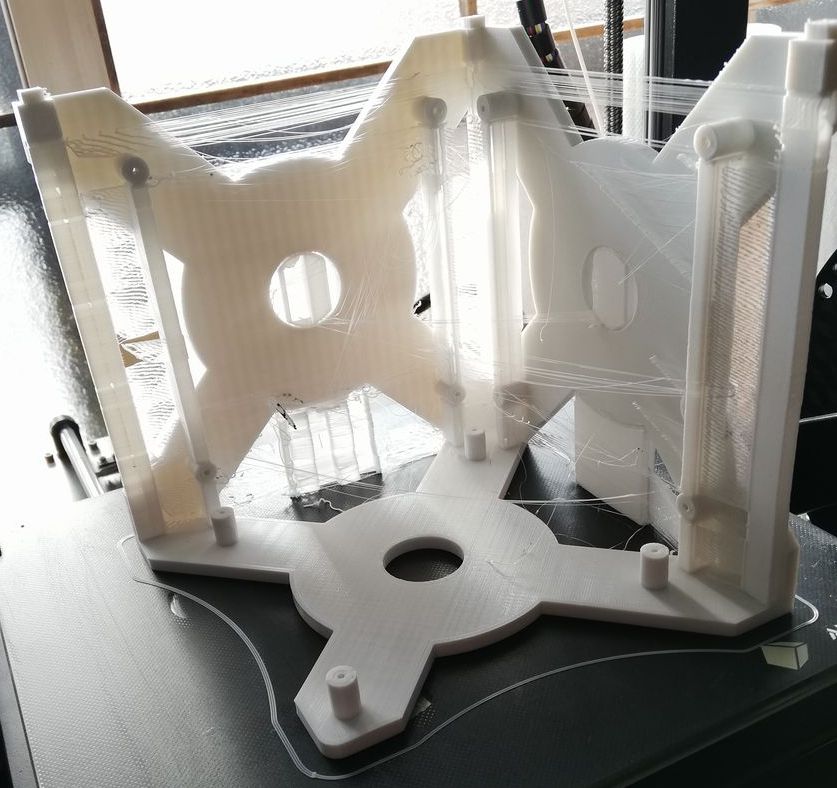
外装は白色PLAフィラメントで出力してみました。
外装を接続した様子です。なかなかカッコいいです。
外装込みで再度調整し各3辺での倒立動作を確認いたしました。
新外装で3辺での倒立
調整完了 pic.twitter.com/xMfuHKk9Wf— HomeMadeGarbage (@H0meMadeGarbage) November 11, 2020
おわりに
筐体が完成しましたので、残りの課題の検討に入りたいと思います。
安定点倒立難しい pic.twitter.com/u6CcvPyQ5n
— HomeMadeGarbage (@H0meMadeGarbage) November 11, 2020
次回は安定した点倒立を目指して頑張りたいと思います!!!
次の記事

関連記事
3軸 姿勢制御モジュール SHISEIGYO-3 への挑戦そして挫折 ーリアクションホイールへの道16ー
 3軸 姿勢制御モジュール SHISEIGYO-3 点倒立の実現 ーリアクションホイールへの道17ー
3軸 姿勢制御モジュール SHISEIGYO-3 点倒立の実現 ーリアクションホイールへの道17ー
 3軸 姿勢制御モジュール SHISEIGYO-3 マイコン削減 ーリアクションホイールへの道19ー
3軸 姿勢制御モジュール SHISEIGYO-3 マイコン削減 ーリアクションホイールへの道19ー
 3軸 姿勢制御モジュール SHISEIGYO-3 物理ブレーキ検討 ーリアクションホイールへの道20ー
3軸 姿勢制御モジュール SHISEIGYO-3 物理ブレーキ検討 ーリアクションホイールへの道20ー
 3軸 姿勢制御モジュール SHISEIGYO-3 物理ブレーキ検討2 ーリアクションホイールへの道21ー
3軸 姿勢制御モジュール SHISEIGYO-3 物理ブレーキ検討2 ーリアクションホイールへの道21ー
 3軸 姿勢制御モジュール SHISEIGYO-3 ESP32とMPU6050の使用 ーリアクションホイールへの道22ー
3軸 姿勢制御モジュール SHISEIGYO-3 ESP32とMPU6050の使用 ーリアクションホイールへの道22ー
 3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
 3軸 姿勢制御モジュール SHISEIGYO-3 起き上がり点倒立達成 ーリアクションホイールへの道24ー
3軸 姿勢制御モジュール SHISEIGYO-3 起き上がり点倒立達成 ーリアクションホイールへの道24ー