3軸 姿勢制御モジュール SHISEIGYO-3 物理ブレーキ検討 ーリアクションホイールへの道20ー
本記事にはアフィリエイト広告が含まれます。
前回はM5Stack Core2 ひとつでモータ3つを制御して長時間ではないですが点倒立動作を実現しました。
いよいよ長時間の点倒立を目指そうと思ったのですが、誤ってM5Stack Core2 に過電圧を突っ込んでしまい破壊してしまいました。。
仕方ないのでここではATOM Matrix を用いてSHISEIGYO-3の起き上がり動作を検討することにしました。
目次
物理ブレーキなしでの起き上がり検討
SHISEIGYO-1は物理ブレーキなしで起き上がり倒立を実現しました。
SHISEIGYO-3も同様に物理ブレーキなしでホイールの回転制御のみでの倒立を試してみたのですが、全く起き上がらずしばらくするとモータから煙が出て壊れてしまいました。。。 😥
M5Stack CORE2壊しちゃったから
ATOMで起き上がりテスト全然起き上がらないので
高速回転させまくってたらモータから煙出て壊れた。。。ショートモータに大きいホイールつけて最速で逆転何度もやったら燃えるわな。。。
ぴえん
物理モータ必須だな
やばいな険しいわこの道 pic.twitter.com/Rx9MNo7tc1— HomeMadeGarbage (@H0meMadeGarbage) November 16, 2020
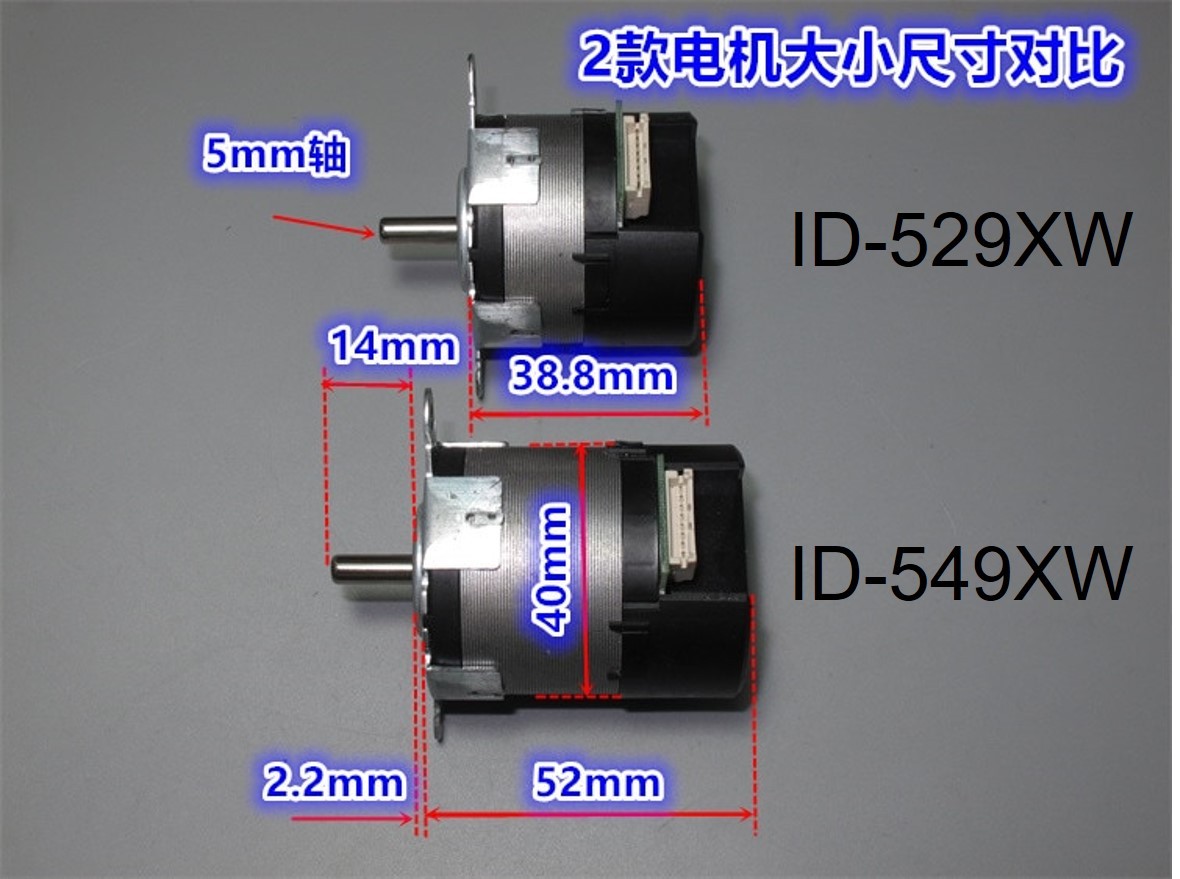
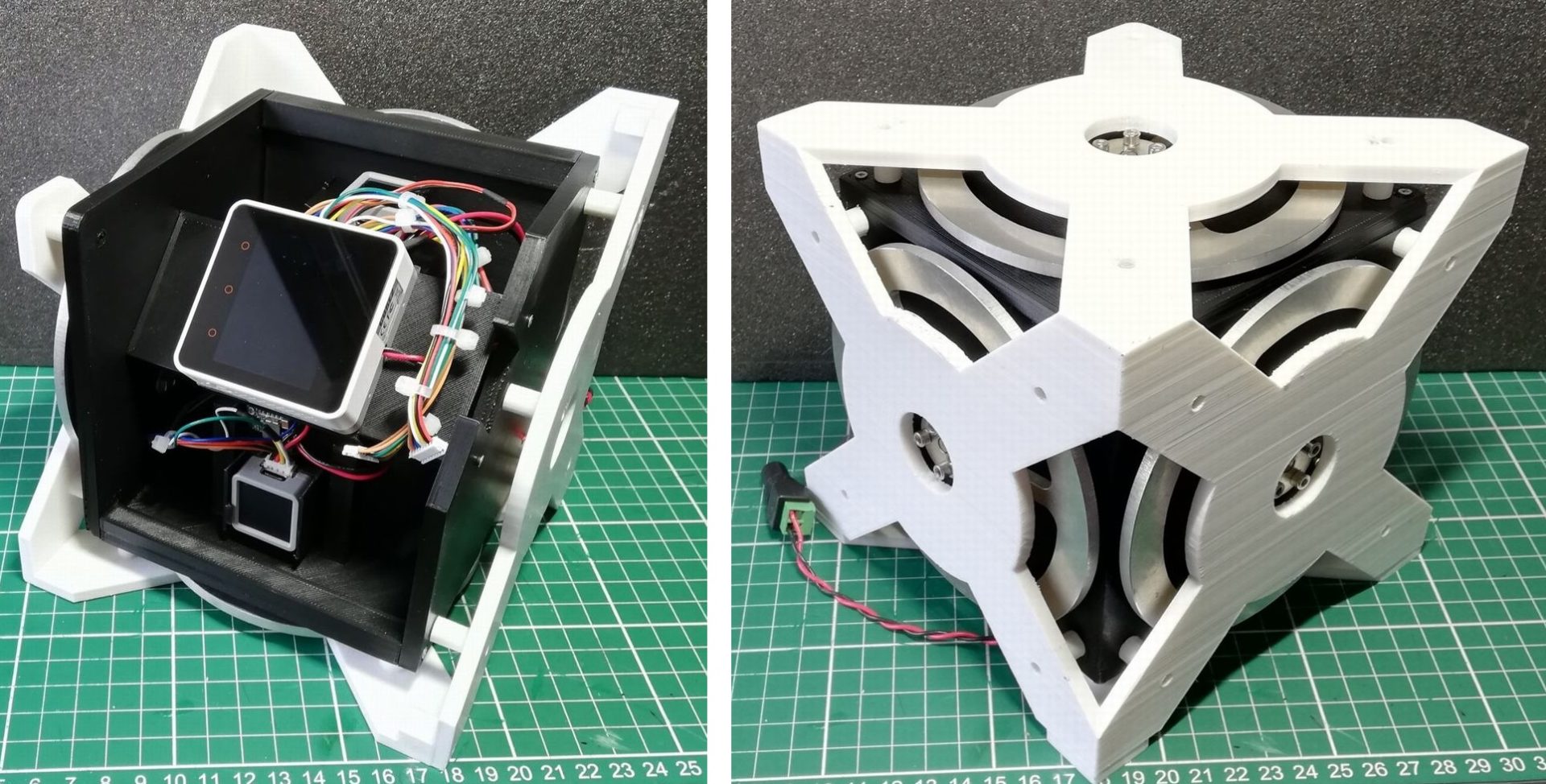
SHISEIGYO-3はモータ3つを筐体に収めるためにSHISEIGYO-1で使っていたモータ(ID-549XW)より小さいモータ(ID-529XW)を使用しており、更にホイールも大きくなっているため負荷が大きかったのだと思います。
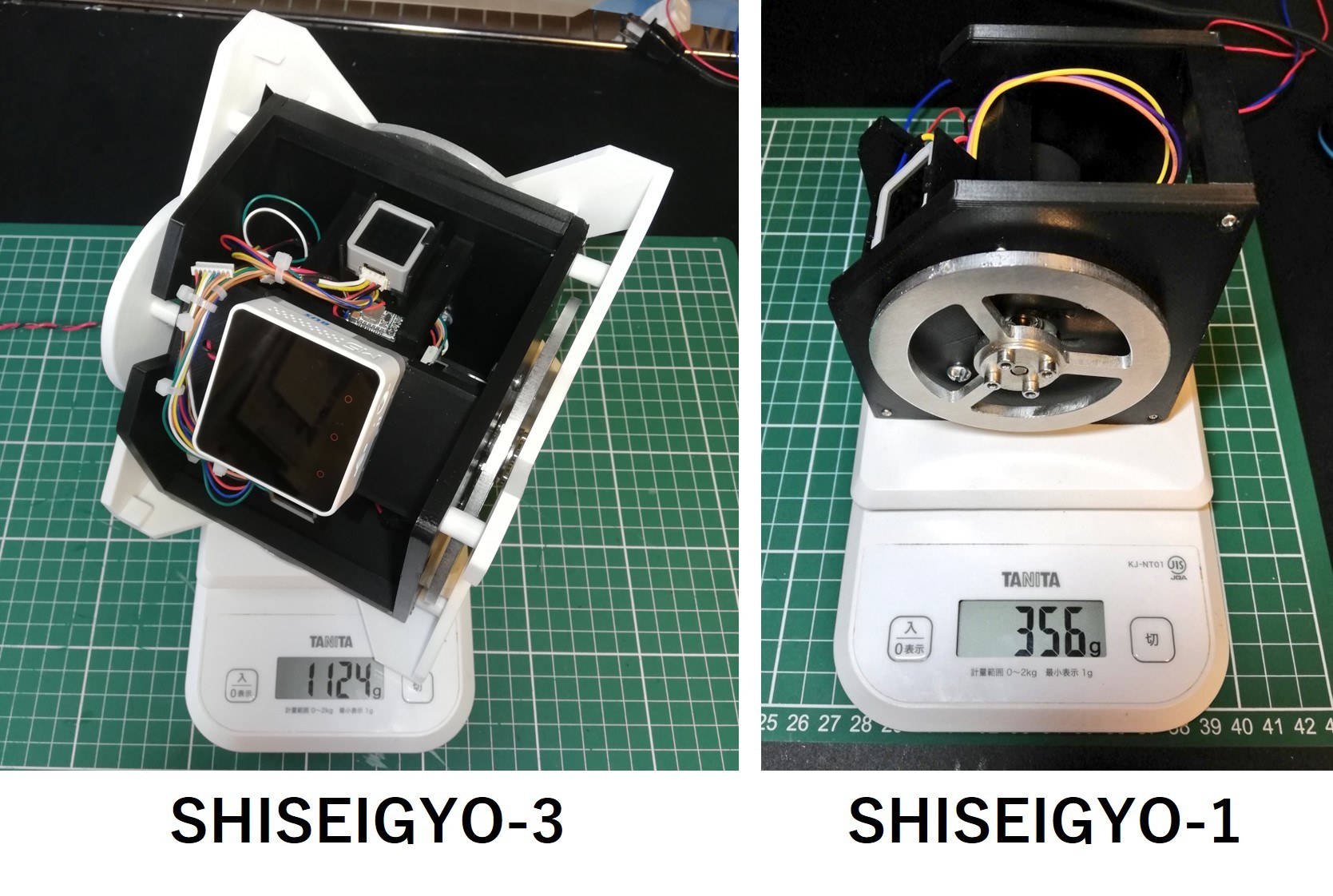
モジュールの総重量もSHISEIGYO-3は1kg以上なので物理ブレーキなしでの起き上がりは難しそうです。
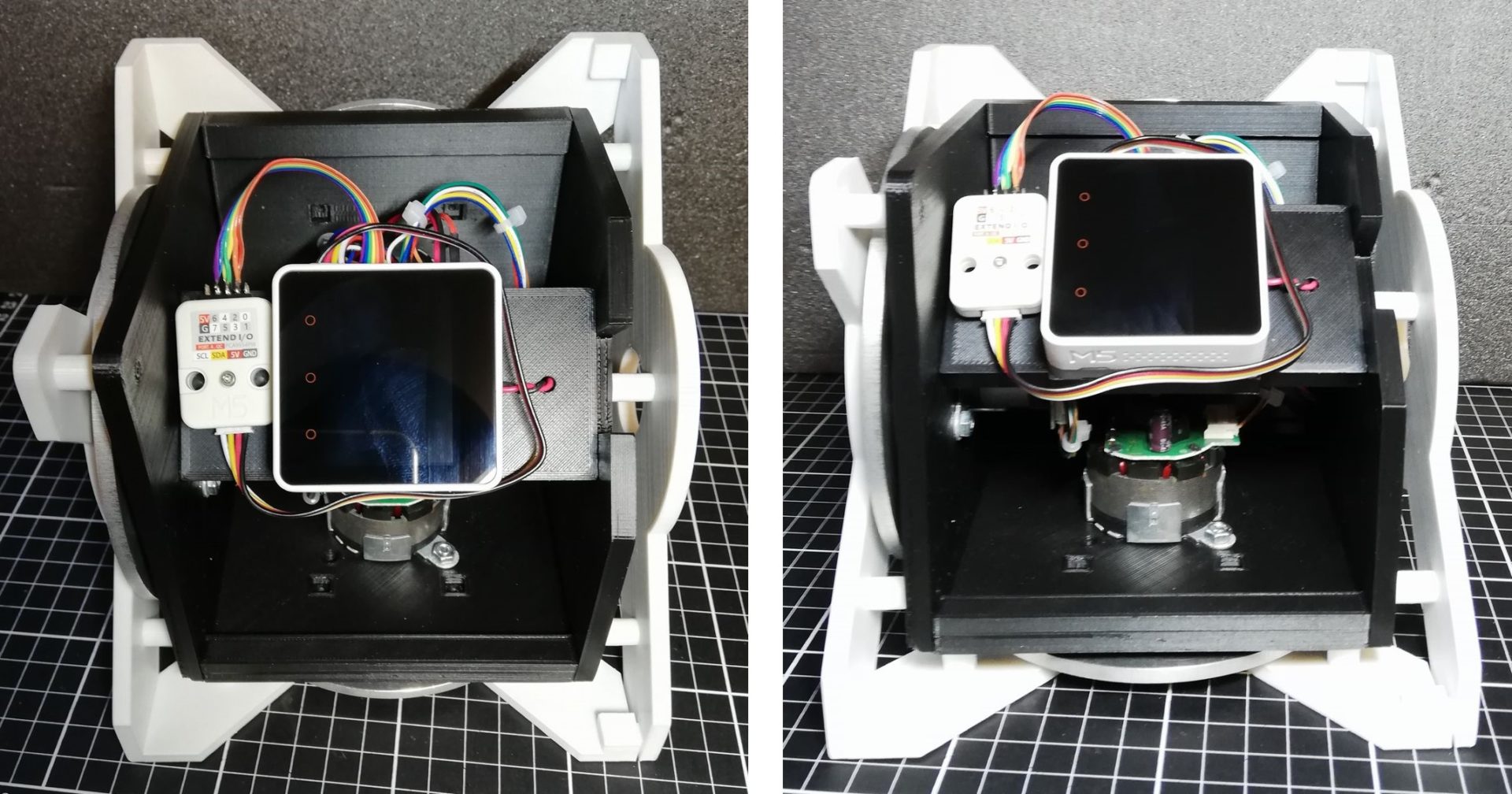
試しにモータを1個にして軽くして、更にモータもサイズとパワーの大きいID-549XWにして、モータ電源24Vで最速で回転させてから反転させてもビクともしませんでした。。
あきらめがつかず
モータをロングバージョンにして更にサイドのモータをとって起き上がり動作実験Maxスピードの反転でもビクともせず。
スッキリあきらめ物理ブレーキの勉強します。#リアクションホイールへの道 pic.twitter.com/ilnowtofC5
— HomeMadeGarbage (@H0meMadeGarbage) November 17, 2020
SHISEIGYO-3の場合は物理ブレーキなしでの起き上がりは不可能であることがわかりました。
物理ブレーキ検討
起き上がりには物理ブレーキを使用するしかないことがわかりましたので
検討せざるを得ません。
物理ブレーキはSHISEIGYO-1の時に検討して失敗しているのでリベンジとなります。
aliexpressに姿勢制御モジュールが比較的安く売っており、その動画でブレーキ付きのモジュールがあるのを発見しました。

以下の動画の冒頭の機種がブレーキ付きの辺倒立モジュールです。
ホイールの側面を覆うようにブレーキが配置されアームを動かしてブレーキングしているようです。
これを参考に物理ブレーキを試作してみました。
まずTPUフィラメントでブレーキとなるリングを出力しました。
この投稿をInstagramで見る
出力したブレーキを適当な長さに切って固定し、アームにはマイクロサーボを使用しました。
【物理ブレーキ検討】
TPUフィラメントでこしらえた
さてどうだろか#リアクションホイールへの道#姿勢制御モジュール pic.twitter.com/ourKD7TKFX— HomeMadeGarbage (@H0meMadeGarbage) November 18, 2020

動作
とりあえず調整なしでモータを起動させてみました。
きた!!
久々にヒット#リアクションホイールへの道#姿勢制御モジュール#打席に立てるだけでもありがたい pic.twitter.com/KmkKQjcrj9— HomeMadeGarbage (@H0meMadeGarbage) November 18, 2020
なんと筐体がひっくり返るほどのトルクを得ることができました!!
筐体に固定したモータは1個のみでモータも大きいID-549XWを使用しています。
起き上がり動作
ブレーキのタイミングやホイールの回転数を調整して、起き上がり動作を実現させました。
ちなみにこちら 一方方向でしか起き上がれません。
サーボのトルクをあげればホイールの回転に負けずにブレーキング出来るかもしれませんが マイクロサーボは小さくて実装しやすいですし経済的なので
ひとまずOKとします。
おわりに
SHISEIGYO-3の筐体で物理ブレーキによる起き上がり辺倒立動作が確認できました。
起き上がり点倒立も夢ではないことがわかり大変うれしいです。
しかしまたまた課題が産出されました。以下の通りです。
- 課題④-1
ショートモータ(ID-529XW)でも起き上がり辺倒立が可能か?
- 課題④-2
モータを3つ筐体に実装しても起き上がれるか? - 課題④-3
物理ブレーキ使用により電源電圧24Vを低減できるか?
前進するたびに課題がドンドン増えますが
また次の道で検討点実験進めたいと思います!
次の記事

関連記事
 3軸 姿勢制御モジュール SHISEIGYO-3 への挑戦そして挫折 ーリアクションホイールへの道16ー
3軸 姿勢制御モジュール SHISEIGYO-3 への挑戦そして挫折 ーリアクションホイールへの道16ー
 3軸 姿勢制御モジュール SHISEIGYO-3 点倒立の実現 ーリアクションホイールへの道17ー
3軸 姿勢制御モジュール SHISEIGYO-3 点倒立の実現 ーリアクションホイールへの道17ー
 3軸 姿勢制御モジュール SHISEIGYO-3 筐体検討 ーリアクションホイールへの道18ー
3軸 姿勢制御モジュール SHISEIGYO-3 筐体検討 ーリアクションホイールへの道18ー
 3軸 姿勢制御モジュール SHISEIGYO-3 マイコン削減 ーリアクションホイールへの道19ー
3軸 姿勢制御モジュール SHISEIGYO-3 マイコン削減 ーリアクションホイールへの道19ー
 3軸 姿勢制御モジュール SHISEIGYO-3 物理ブレーキ検討2 ーリアクションホイールへの道21ー
3軸 姿勢制御モジュール SHISEIGYO-3 物理ブレーキ検討2 ーリアクションホイールへの道21ー
 3軸 姿勢制御モジュール SHISEIGYO-3 ESP32とMPU6050の使用 ーリアクションホイールへの道22ー
3軸 姿勢制御モジュール SHISEIGYO-3 ESP32とMPU6050の使用 ーリアクションホイールへの道22ー
 3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
 3軸 姿勢制御モジュール SHISEIGYO-3 起き上がり点倒立達成 ーリアクションホイールへの道24ー
3軸 姿勢制御モジュール SHISEIGYO-3 起き上がり点倒立達成 ーリアクションホイールへの道24ー