1軸 姿勢制御モジュール SHISEIGYO-1 完成 ーリアクションホイールへの道14ー
本記事にはアフィリエイト広告が含まれます。
これまで歩んできたこの道ですが、ついに1軸 姿勢制御モジュール SHISEIGYO-1 (シセーギョーワン) が完成いたしました!
前回からの改善点とSHISEIGYO-1 の機能説明をさせていただきます。
目次
滑りの改善
SHISEIGYO-1 は筐体を3Dプリンタで構築し、軽いため倒立動作の際に滑って不安定になることがありました。
そこで、前々から気になっておりました。
やわらかい3Dプリンタ用フィラメントを検討してみました。
自作フィラメントホルダー。
細いので不安はあったけど、うまくTPU出力できた。
プリント速度: 20mm/s
ヘッド移動速度: 80mm/s
ヘッド: 220℃
プラットフォーム: 60℃#Adventurer3 pic.twitter.com/1IlZ34FK46— パリピ般若(hack-tenorion) (@hack_tnr) November 26, 2019
例のごとくTwitter上で質問したところTPUフィラメントというゴムのようなフレキシブルなモノがありプリント設定も教えていただきました。
早速購入!とりあえずAnyCubic公式の赤があった。
教えていただいた設定で出力してみました。
ノズル温度: 220℃、ベッド温度: 60℃、プリント速度: 20mm/s
(普段使用しているPLAフィラメントの時は 200℃、60℃、50mm/s)
0.4mm厚
いいですねぇこれでゾイドの関節キャップ作れるわ pic.twitter.com/7XV9ap2g5V
— HomeMadeGarbage (@H0meMadeGarbage) August 22, 2020
凄くいい感じ!これは色々応用できそう。
非常にフレキシブルで例えるならゾイドの関節用キャップや、パトレイバーのプラモの関節のような質感です。
ゾイドの関節キャップはよく長男くん![]() が口の中にいれて、歯で噛んでキャップ内の空気を抜いて舌先に吸引装着して遊んでしまいダメにしてしまうので(私も子供のころよくやっていた。。。)、今度モデル作ってプリントしてみても良いかもしれません。
が口の中にいれて、歯で噛んでキャップ内の空気を抜いて舌先に吸引装着して遊んでしまいダメにしてしまうので(私も子供のころよくやっていた。。。)、今度モデル作ってプリントしてみても良いかもしれません。
TPUフィラメントの利用
SHISEIGYO-1の底面の棒をTPUフィラメントで出力してみました。
起き上がりやすくするために R6で丸めてます。
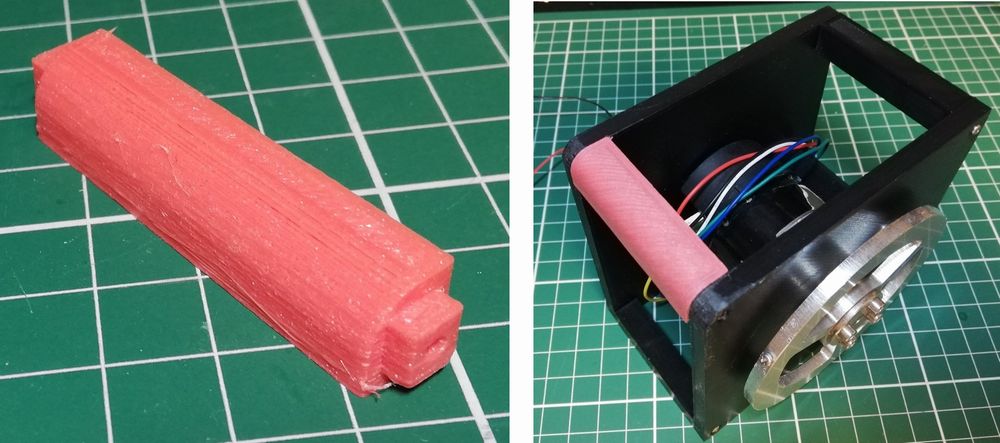
ゴムのような材質のためにカチカチのPLAとは異なりグリップ力が格段に向上しました。
ほぼ滑りません!
底面をTPUフィラメントで出力してみた。#リアクションホイールへの道
お滑りに強くなりました!
ANYCUBIC の ANYCUBIC Flexible TPU フィラメント素材 弾性樹脂 1.75mm 精確度+/-0.02mm 3Dプリンター用 500g (赤) を Amazon でチェック! https://t.co/3CH0RSdsfE pic.twitter.com/EVLMgoXSav
— HomeMadeGarbage (@H0meMadeGarbage) August 22, 2020
イジワル試験にも非常に強くなりました!
TPUフィラメントでお滑りに強くなり、外乱にも強くなった。#リアクションホイールへの道 pic.twitter.com/cOhK4oMKL2
— HomeMadeGarbage (@H0meMadeGarbage) August 22, 2020
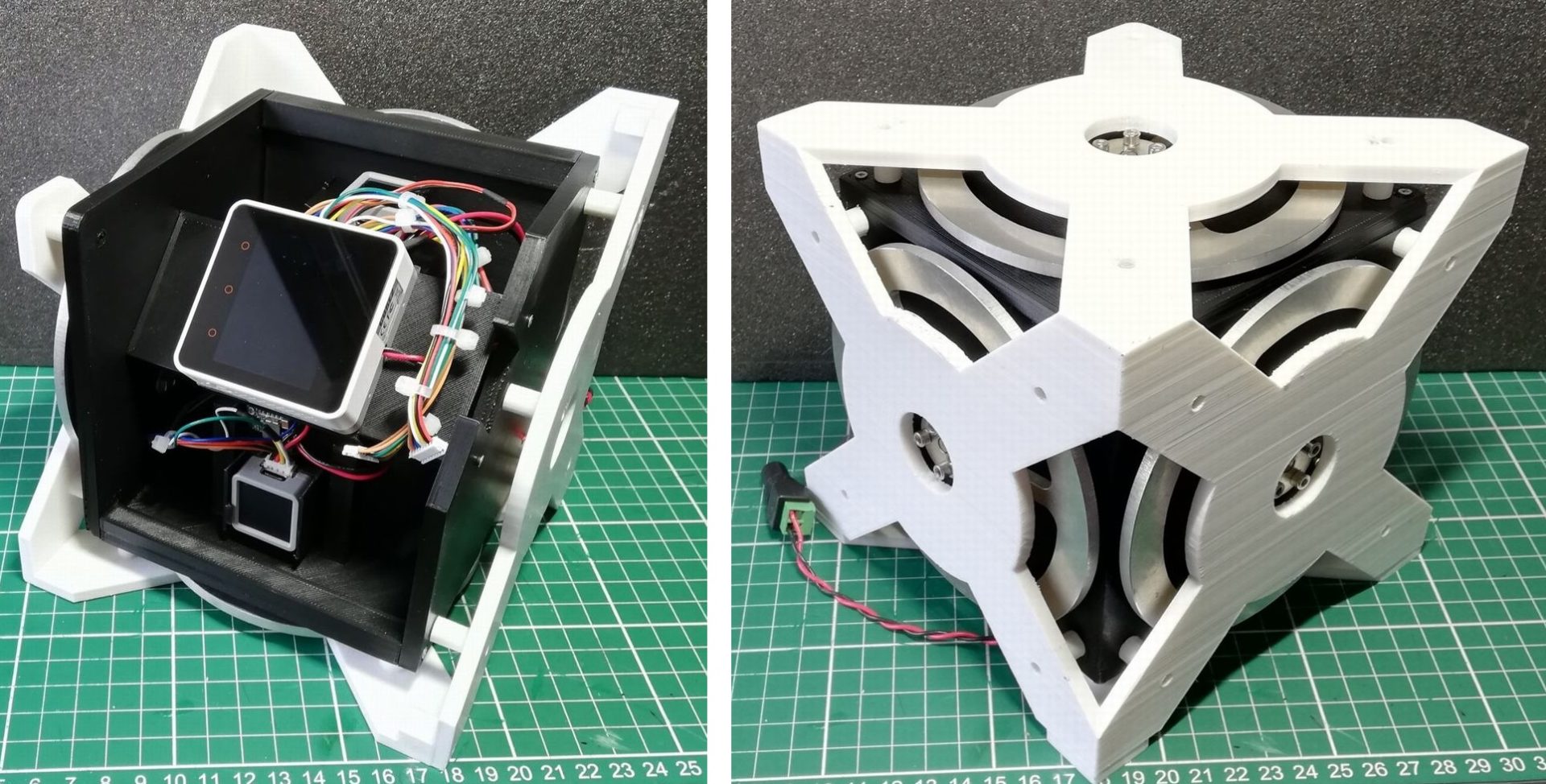
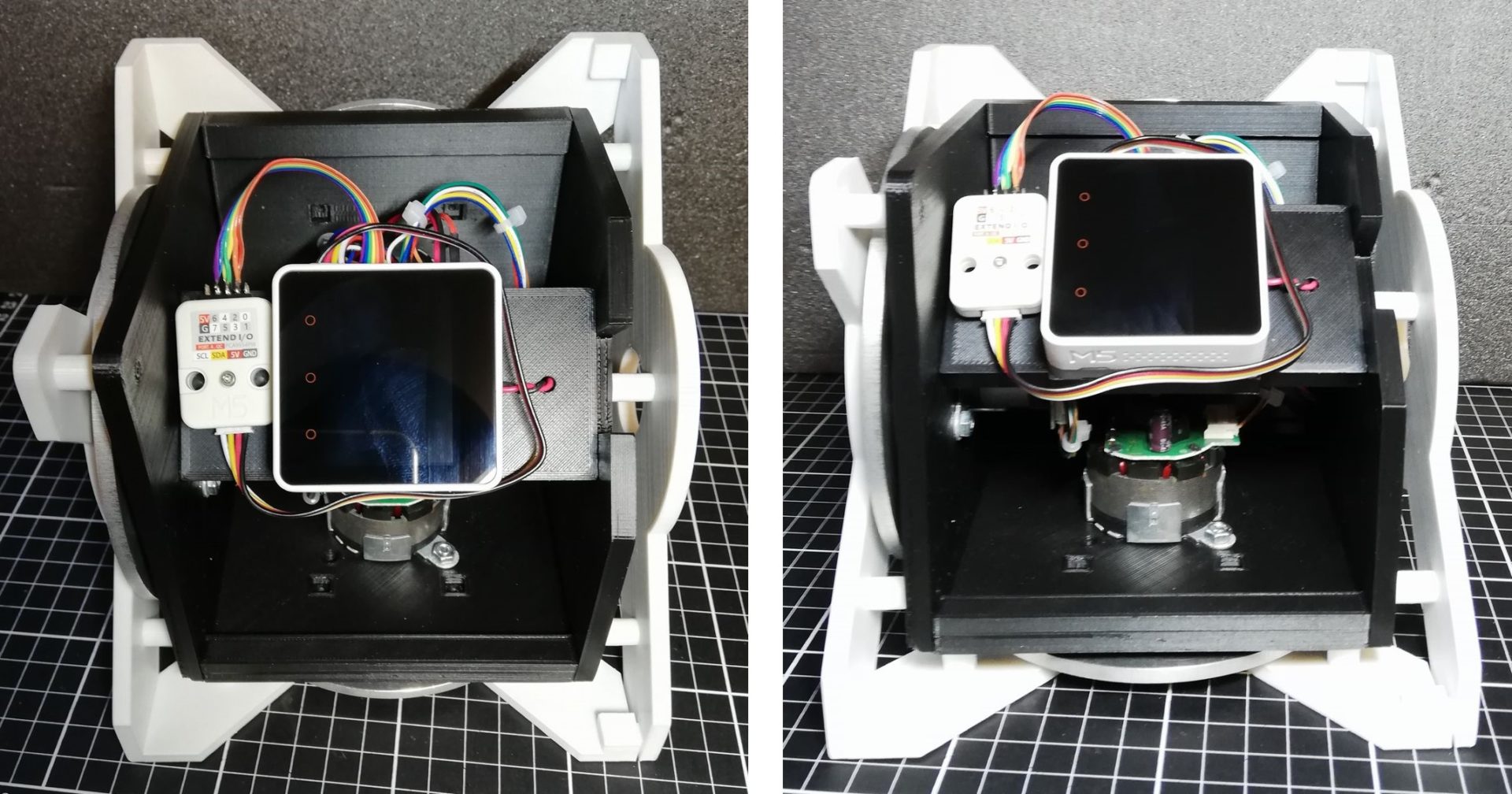
SHISEIGYO-1 構成
構成は以下の通りです。
驚くべきことに物理ブレーキは搭載しておりません。
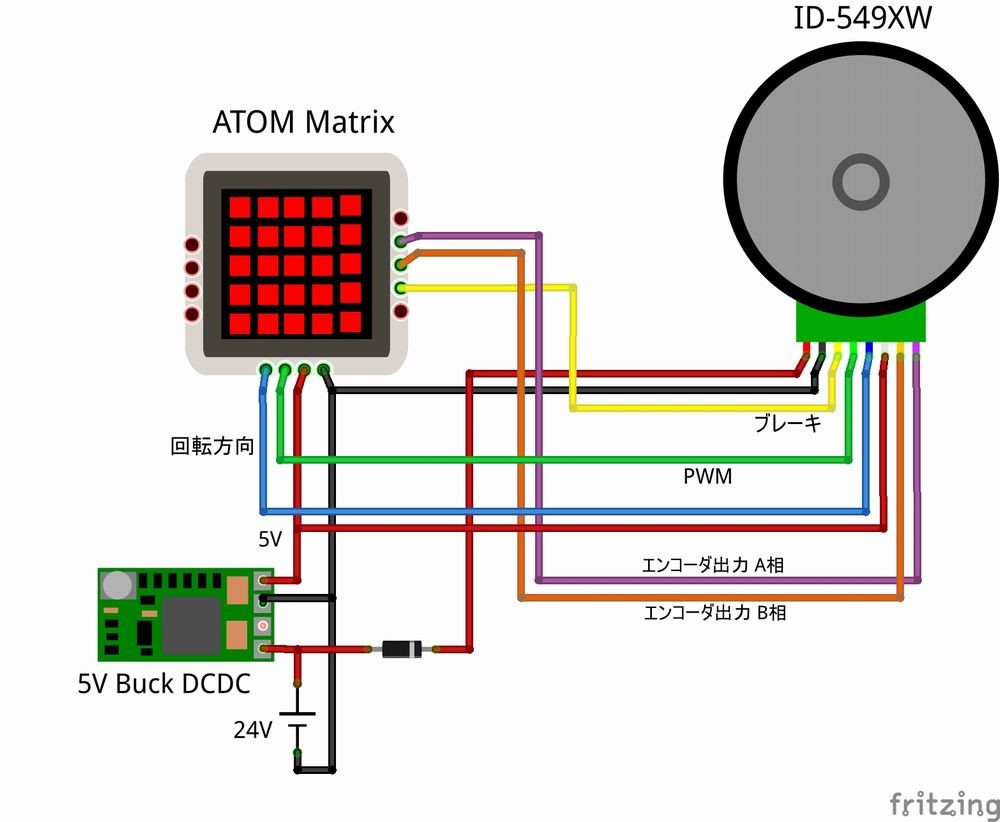
- M5Stack ATOM Matrix
- フライホイール付き ブラシレスモータ ID-549XW
タイプ 3 : フライホイールの直径: 80 ミリメートル、dcブラシレス光学エンコーダ (ロングタイプ) を購入
- 降圧DCDCレギュレータ
- 逆起電力防止用ダイオード IN5819

起き上がりを実現するためにモータ電源には24Vが必要となります。
安定化電源を使用して開発しておりましたが以下のACアダプタでも動作を確認できました。
これで持ち運びもしやすくなりました♪
SHISEIGYO-1 の機能
電源投入で動作します。
ATOM MatrixのLEDマトリクスが点灯し角度をインジケータやモード状況を表示します。
倒立動作
手でやさしく起きあげると倒立します。
SHISEIGYO-1 倒立動作 pic.twitter.com/wl5uFw4n2a
— HomeMadeGarbage (@H0meMadeGarbage) August 23, 2020
起き上がり動作
ATOM Matrixのボタンを押すと、起き上がって倒立します。
物理ブレーキなしにモータの回転制御のみで起き上がります。
SHISEIGYO-1 起き上がりボタン pic.twitter.com/FL8CuKYO27
— HomeMadeGarbage (@H0meMadeGarbage) August 23, 2020
Blynk通信モード
Blynkアプリを起動してBLE接続すると、パラメータ調整や遠隔起き上がり起動が可能となります。
BLE接続されるとATOM MatrixのLEDマトリクスの背景が黄色になります。
SHISEIGYO-1 Blynk BLE通信モード pic.twitter.com/rdqb3aYdSb
— HomeMadeGarbage (@H0meMadeGarbage) August 23, 2020
おわりに
ついにSHISEIGYO-1が完成いたしました。
次回以降はついに応用を考えたいと思います。
まだまだ続きます!それではまた次の道でお会いしましょう!
制作レシピ販売 (20/8/27)
1軸姿勢制御モジュール SHISEIGYO-1の制作レシピを以下で 販売いたします。 全16ページ ¥500
3Dプリンタ用 筐体3DモデルとArduino IDE サンプルコードは同ページで無料ダウンロードできます。
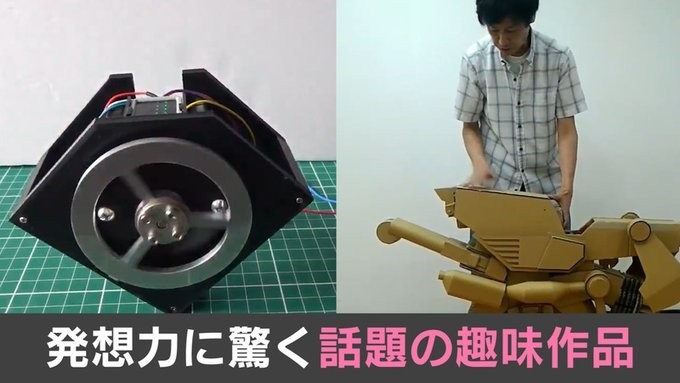
ABEMAで紹介いただきました (20/8/29)
ABEMA NEWS「週刊BUZZ動画」にてSHISEIGYO-1を紹介していただきました。
ありがとうございます!!
次の記事

関連記事
 1軸 姿勢制御モジュール 物理ブレーキの検証 ーリアクションホイールへの道12ー
1軸 姿勢制御モジュール 物理ブレーキの検証 ーリアクションホイールへの道12ー
 3軸 姿勢制御モジュール SHISEIGYO-3 への挑戦そして挫折 ーリアクションホイールへの道16ー
3軸 姿勢制御モジュール SHISEIGYO-3 への挑戦そして挫折 ーリアクションホイールへの道16ー
 3軸 姿勢制御モジュール SHISEIGYO-3 点倒立の実現 ーリアクションホイールへの道17ー
3軸 姿勢制御モジュール SHISEIGYO-3 点倒立の実現 ーリアクションホイールへの道17ー
 3軸 姿勢制御モジュール SHISEIGYO-3 筐体検討 ーリアクションホイールへの道18ー
3軸 姿勢制御モジュール SHISEIGYO-3 筐体検討 ーリアクションホイールへの道18ー
 3軸 姿勢制御モジュール SHISEIGYO-3 マイコン削減 ーリアクションホイールへの道19ー
3軸 姿勢制御モジュール SHISEIGYO-3 マイコン削減 ーリアクションホイールへの道19ー
 3軸 姿勢制御モジュール SHISEIGYO-3 物理ブレーキ検討 ーリアクションホイールへの道20ー
3軸 姿勢制御モジュール SHISEIGYO-3 物理ブレーキ検討 ーリアクションホイールへの道20ー
 3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
 3軸 姿勢制御モジュール SHISEIGYO-3 起き上がり点倒立達成 ーリアクションホイールへの道24ー
3軸 姿勢制御モジュール SHISEIGYO-3 起き上がり点倒立達成 ーリアクションホイールへの道24ー