1軸 姿勢制御モジュール 起き上がり倒立の確立 ーリアクションホイールへの道13ー
本記事にはアフィリエイト広告が含まれます。
前回は物理ブレーキの検証を行いましたが、物理強度が足りず私の心もろともへし折られ断念いたしました。
今回は本筋に戻り、物理ブレーキなしでの起き上がり倒立を目指します。
目次
倒立精度の向上
リアクションホイールへの道11で制御パラメータを理論や物理で説明のつくものだけに整理して安定倒立を目指しました。
ここでは更にモータを制御するループの周期を20msecから7msecにして、パラメータ調整いたしました。
制御ループ 20msec → 7msecに変更
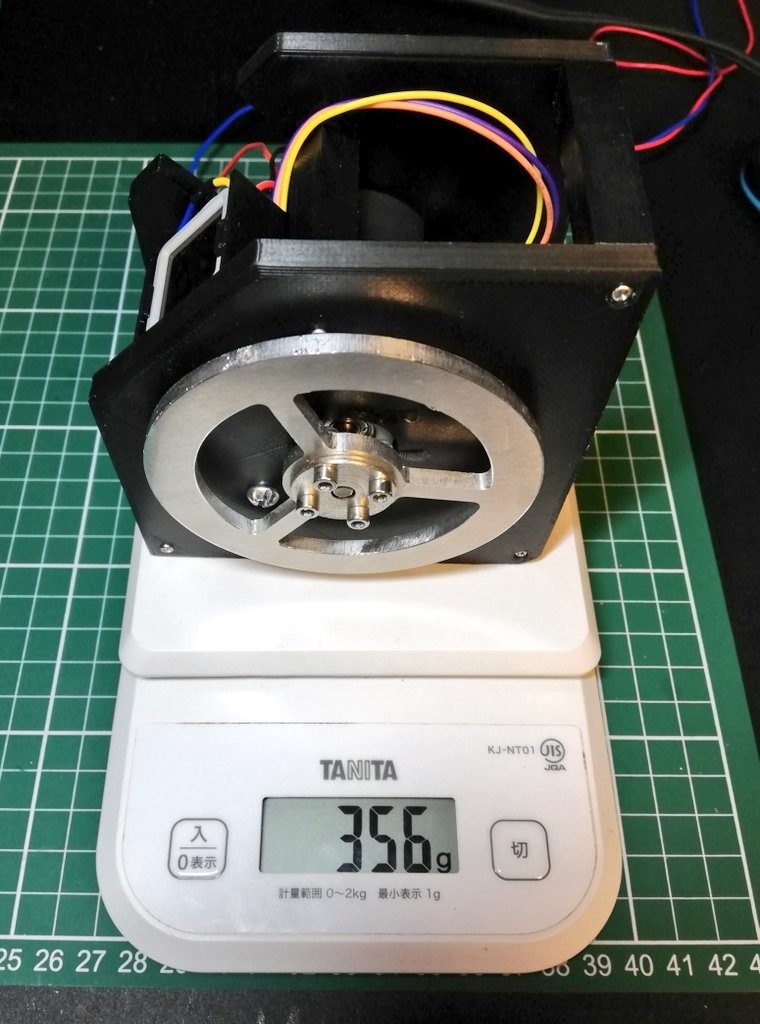
SHISEIGYO-1は軽い(356g)ので早い制動のほうが安定するみたい。
みえないけどNeopixelのマトリクスもガンガン動かしてるのでこれ以上早くするにはデュアルコアかな。あとこのお滑りは何とかしたい#リアクションホイールへの道 pic.twitter.com/3Y4h1p1eVe
— HomeMadeGarbage (@H0meMadeGarbage) August 21, 2020
より安定度が増しました!やった!
ちょっと滑りやすいのが今後の改善点でしょうか。
SHISEIGYO-1は軽いので、早めに制動かけたほうがいいようですね。
356gでした。モータ+フライホイールのみで 240g。
軽いので滑りやすいんでしょうね。。。
多少イジワルしても健気に倒立してくれます。。。
起き上がり倒立
倒立の安定度が非常に向上しましたので、リアクションホイールへの道10で確立した物理ブレーキなしでの起き上がり倒立の手法と組み合わせてみました。
できたーー!
ついにできました。成功確率も8割以上で、たまに滑ってしまうのでやはり改善が必要です。
物理ブレーキなしで起き上がり倒立が達成できましたので、部品点数も減りますし摩耗などもないのでモジュールやモータの劣化も少なく長持ちします。
非常に大きな成果と言えるのではないでしょうか。
おわりに
遂に物理ブレーキなしでの起き上がり倒立を達成いたしました。
おはよう
夢じゃなかった。 pic.twitter.com/vzpSxta1i6
— HomeMadeGarbage (@H0meMadeGarbage) August 21, 2020
構成は以下の通り単純で、部品代は約6,200円ほどです。
下図の12Vは安定化電源で今は24V印可しています。
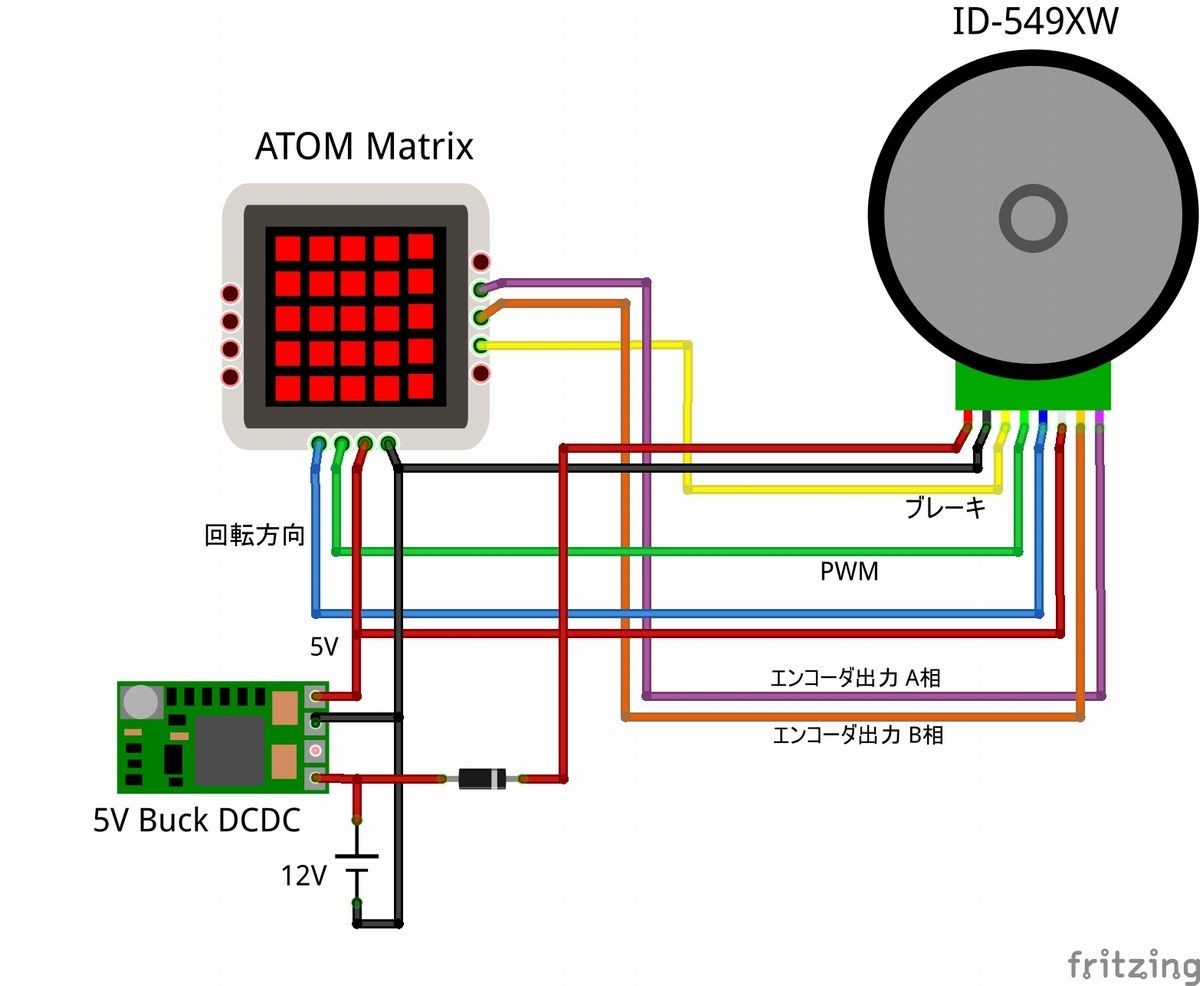
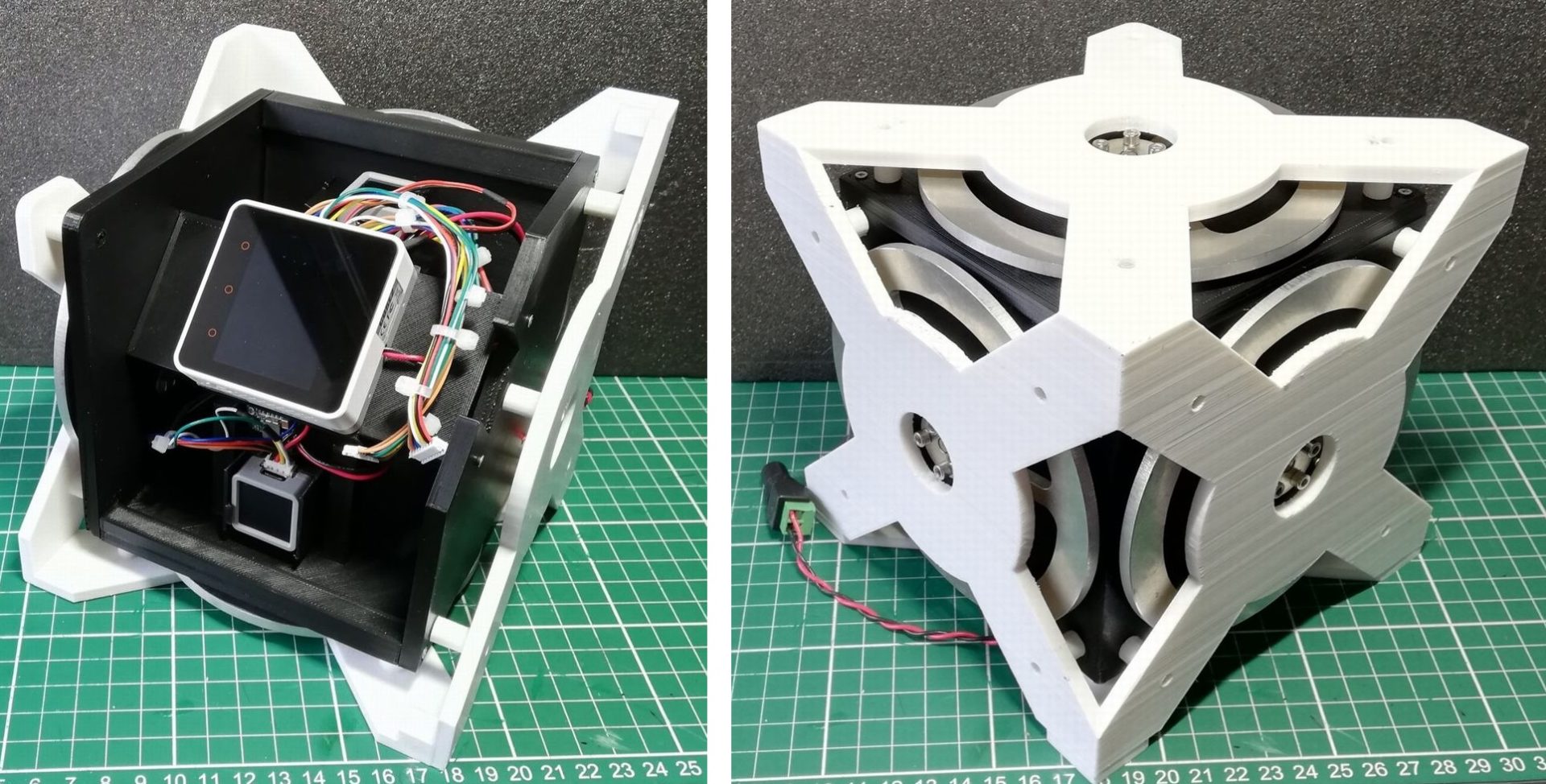
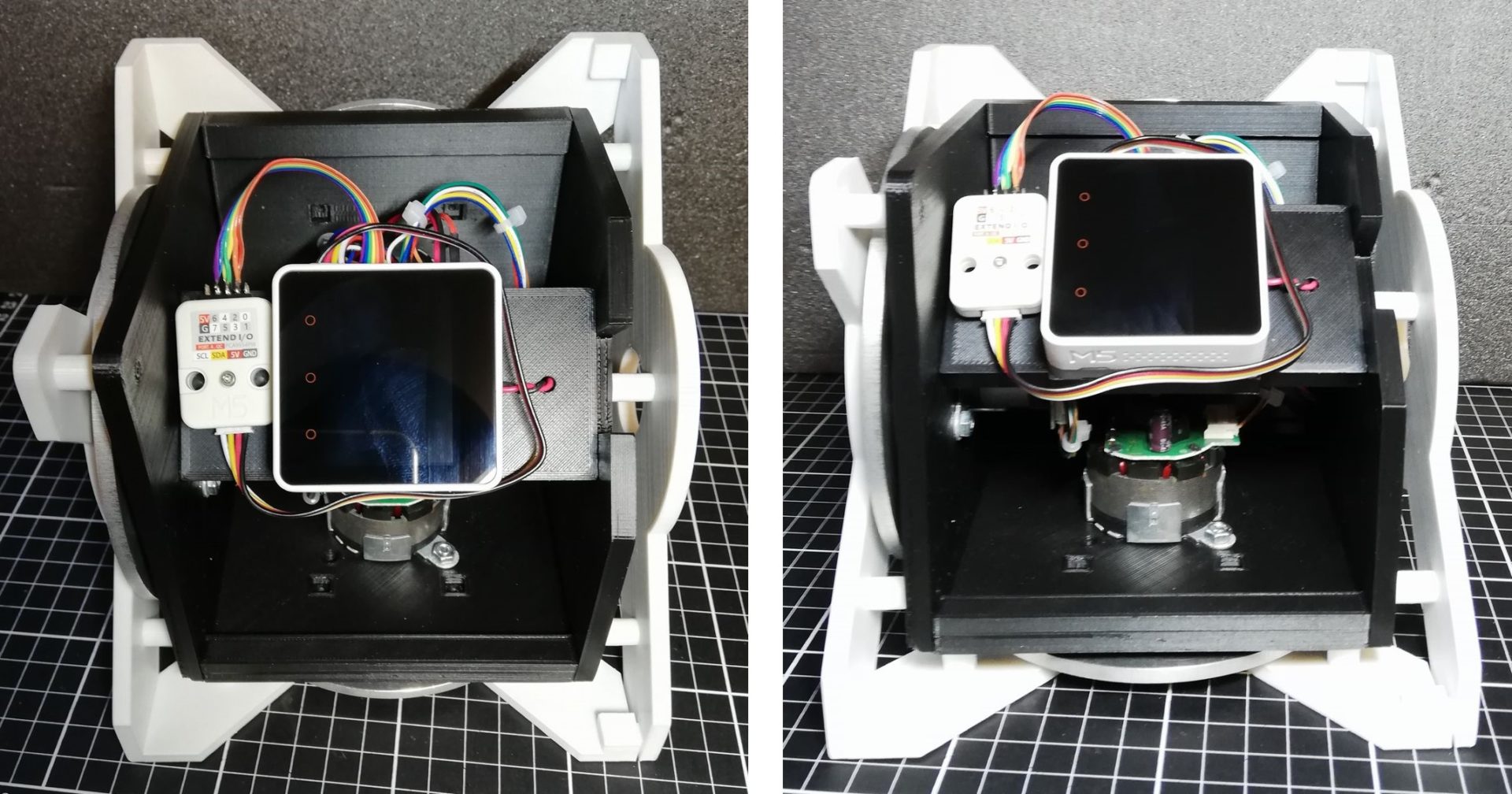
- M5Stack ATOM Matrix
- フライホイール付き ブラシレスモータ ID-549XW
- 降圧DCDCレギュレータ

次回以降は筐体の滑りの改善と最終報告書及びSHISEIGYO-1の製法をまとめたいと思います。
それではまた次の道でお会いしましょう!
次の記事

関連記事
 1軸 姿勢制御モジュール 物理ブレーキの検証 ーリアクションホイールへの道12ー
1軸 姿勢制御モジュール 物理ブレーキの検証 ーリアクションホイールへの道12ー
 3軸 姿勢制御モジュール SHISEIGYO-3 への挑戦そして挫折 ーリアクションホイールへの道16ー
3軸 姿勢制御モジュール SHISEIGYO-3 への挑戦そして挫折 ーリアクションホイールへの道16ー
 3軸 姿勢制御モジュール SHISEIGYO-3 点倒立の実現 ーリアクションホイールへの道17ー
3軸 姿勢制御モジュール SHISEIGYO-3 点倒立の実現 ーリアクションホイールへの道17ー
 3軸 姿勢制御モジュール SHISEIGYO-3 筐体検討 ーリアクションホイールへの道18ー
3軸 姿勢制御モジュール SHISEIGYO-3 筐体検討 ーリアクションホイールへの道18ー
 3軸 姿勢制御モジュール SHISEIGYO-3 マイコン削減 ーリアクションホイールへの道19ー
3軸 姿勢制御モジュール SHISEIGYO-3 マイコン削減 ーリアクションホイールへの道19ー
 3軸 姿勢制御モジュール SHISEIGYO-3 物理ブレーキ検討 ーリアクションホイールへの道20ー
3軸 姿勢制御モジュール SHISEIGYO-3 物理ブレーキ検討 ーリアクションホイールへの道20ー
 3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
 3軸 姿勢制御モジュール SHISEIGYO-3 起き上がり点倒立達成 ーリアクションホイールへの道24ー
3軸 姿勢制御モジュール SHISEIGYO-3 起き上がり点倒立達成 ーリアクションホイールへの道24ー