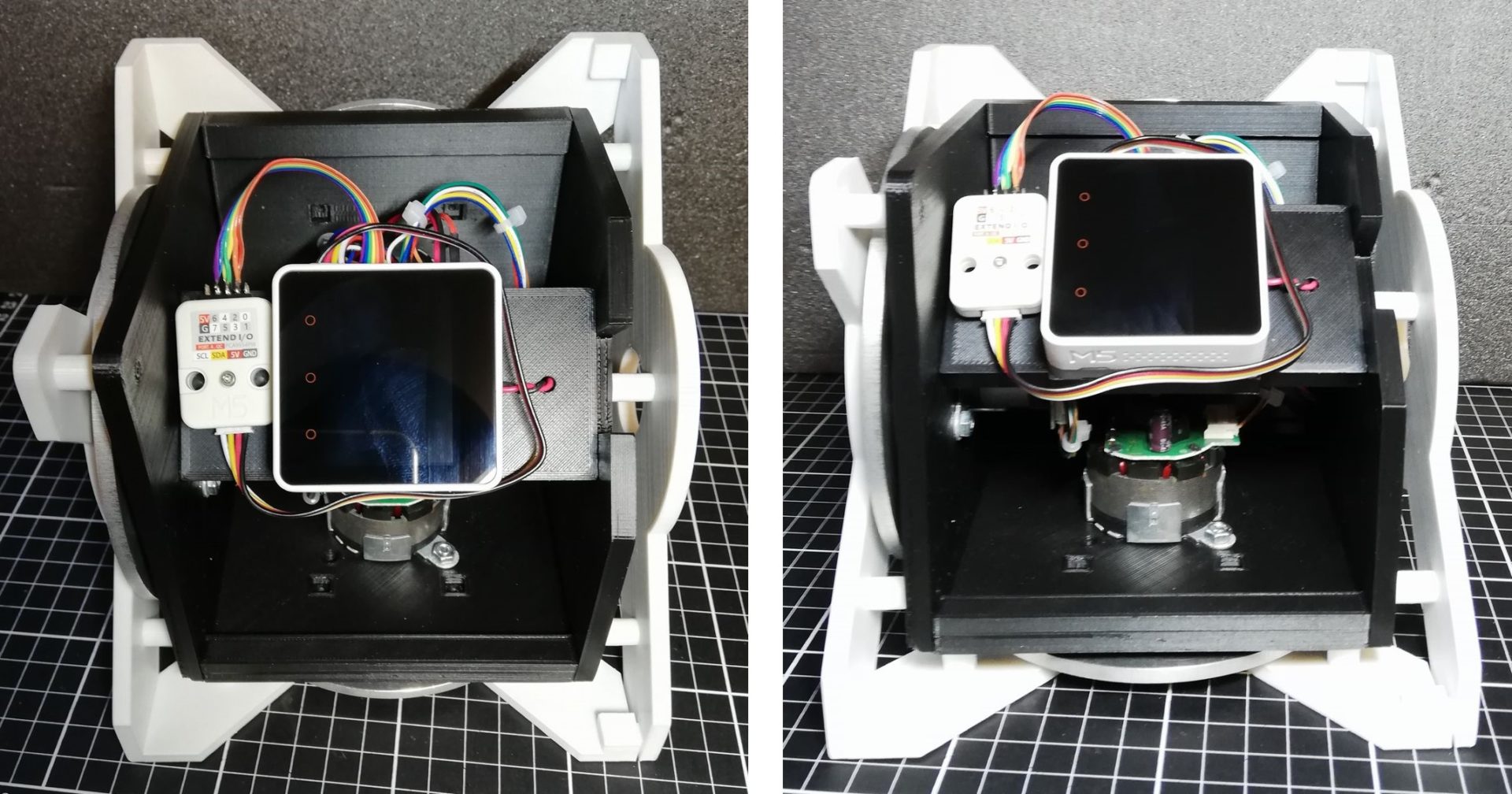
1軸 姿勢制御モジュール 起き上がりからの倒立 ーリアクションホイールへの道10ー
本記事にはアフィリエイト広告が含まれます。
前回は 1軸 姿勢制御モジュール SHISEIGYO-1 の起き上がりを実現しました。
ここでは恐らく最終にして最難関であろう起き上がりからの倒立を目指します。
目次
試行錯誤
起き上がりからの倒立は非常に難しいです。SHISEIGYO-1には物理ブレーキがないのが大きな要因といえます。
起き上がりの際にもフライホイールを最高速度にしてからブレーキをかけるのではなく、一瞬逆回転させて反動で起きあげています。
起き上がりから倒立させるには、物理ブレーキなしに倒立地点で程よく回転を止めなくてはいけません。
例えるなら自動車で前進とバックとエンジンブレーキのみで縦列駐車するようなものです。
手法①
最高速度から0.4sec逆回転でハネ起きて倒立地点 (0°) で通常制動にもどす。
長い夏になりそうだぜ#リアクションホイールへの道 pic.twitter.com/wBujPeypiC
— HomeMadeGarbage (@H0meMadeGarbage) August 14, 2020
手法②
最高速度から逆回転でハネ起きて0°付近でホイール止めるべく更に逆回転
エンドレス・サマー#リアクションホイールへの道 pic.twitter.com/GSGS95e2Vp
— HomeMadeGarbage (@H0meMadeGarbage) August 14, 2020
話にならん。。。
手法③
最高速度から逆回転で0°に近づくほどに速度を低下させてから通常制動
難しサマー#リアクションホイールへの道 pic.twitter.com/h4IKdHhkjN
— HomeMadeGarbage (@H0meMadeGarbage) August 14, 2020
惜しいけど。。。
手法④
まずはみてください!!
遂に起き上がりからの倒立が実現できました!!
手法フロー
- まずは起き上がるためにホイールの回転を最高速度に加速します。
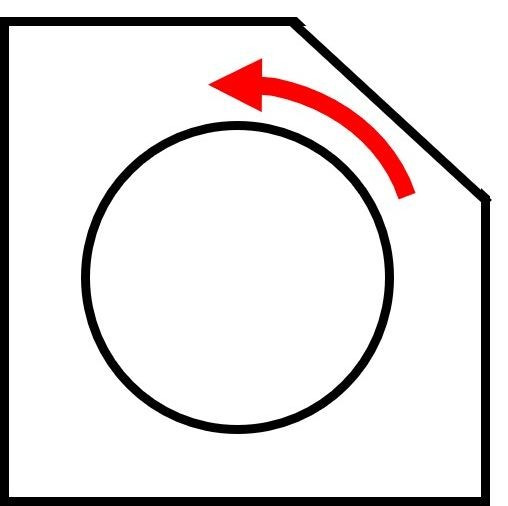
- 最高速度に達したら逆回転させて跳ね起きます。
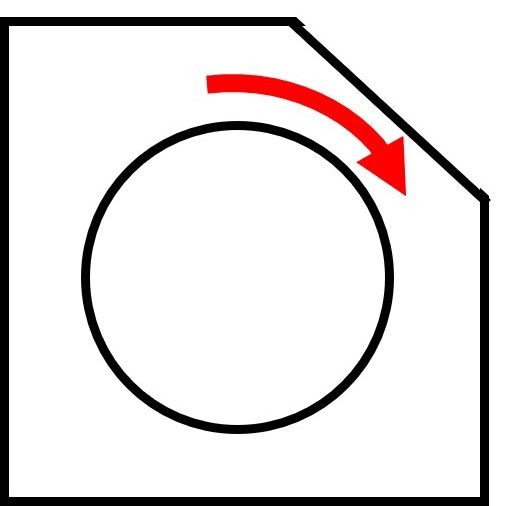
- 起き上がり後は倒立地点の0°に向けて回転速度を低下させていきます。
姿勢角に比例させてPWM信号をモータに入力します。
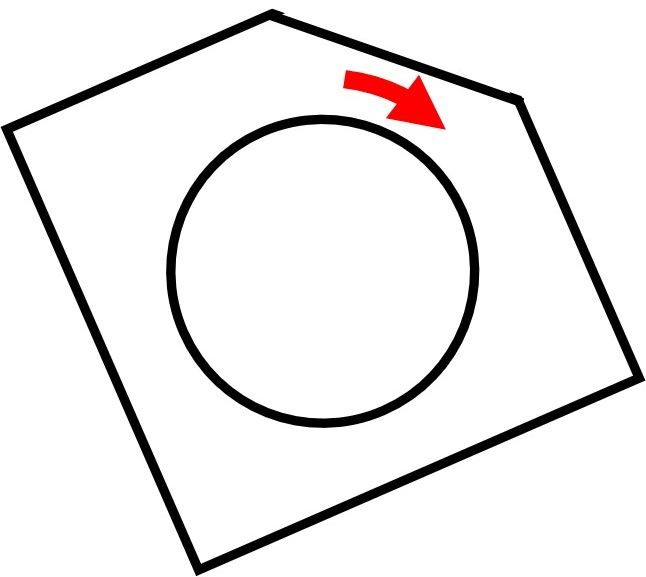
- 倒立地点を過ぎて所定の角度で倒立地点でホイールの回転速度がゼロになるように制動をかけます。
現状はここまでの動作しか仕込めていませんが
この後に通常の倒立動作に入れば目的は達成といえます。
おわりに
ついに起き上がり後の倒立が実現できるレシピが出来上がりました。
非常に嬉しい!
以降はこのレシピの確度を向上させて倒立動作に移行させたいと思います。
それでは次の道でお会いしましょう!
次の記事

関連記事
 1軸 姿勢制御モジュール 起き上がり実験 ーリアクションホイールへの道9ー
1軸 姿勢制御モジュール 起き上がり実験 ーリアクションホイールへの道9ー
 1軸 姿勢制御モジュール 倒立精度の向上 ーリアクションホイールへの道11ー
1軸 姿勢制御モジュール 倒立精度の向上 ーリアクションホイールへの道11ー
 1軸 姿勢制御モジュール 物理ブレーキの検証 ーリアクションホイールへの道12ー
1軸 姿勢制御モジュール 物理ブレーキの検証 ーリアクションホイールへの道12ー
 3軸 姿勢制御モジュール SHISEIGYO-3 への挑戦そして挫折 ーリアクションホイールへの道16ー
3軸 姿勢制御モジュール SHISEIGYO-3 への挑戦そして挫折 ーリアクションホイールへの道16ー
 3軸 姿勢制御モジュール SHISEIGYO-3 点倒立の実現 ーリアクションホイールへの道17ー
3軸 姿勢制御モジュール SHISEIGYO-3 点倒立の実現 ーリアクションホイールへの道17ー
 3軸 姿勢制御モジュール SHISEIGYO-3 マイコン削減 ーリアクションホイールへの道19ー
3軸 姿勢制御モジュール SHISEIGYO-3 マイコン削減 ーリアクションホイールへの道19ー
 3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
 3軸 姿勢制御モジュール SHISEIGYO-3 起き上がり点倒立達成 ーリアクションホイールへの道24ー
3軸 姿勢制御モジュール SHISEIGYO-3 起き上がり点倒立達成 ーリアクションホイールへの道24ー