
1軸 姿勢制御モジュール 起き上がり実験 ーリアクションホイールへの道9ー
本記事にはアフィリエイト広告が含まれます。
さて前回までに SHISEIGYO-1 の倒立動作がそれなりに実現されましたので、
いよいよ起き上がりを試してみたいと思います。
目次
起き上がり動作について
JAXAの3軸 姿勢制御モジュール は下の動画の通り、起き上がって さらには点倒立までします。
トラ技記事によりますと、電磁ブレーキなるもので高速回転するリアクションホイールを物理的に急停止させて
爆発的トルクを発生させ起き上がり動作を実現しているとのことです。
ここではSHISEIGYO-1 も起き上がり動作ができるか実験してみました。
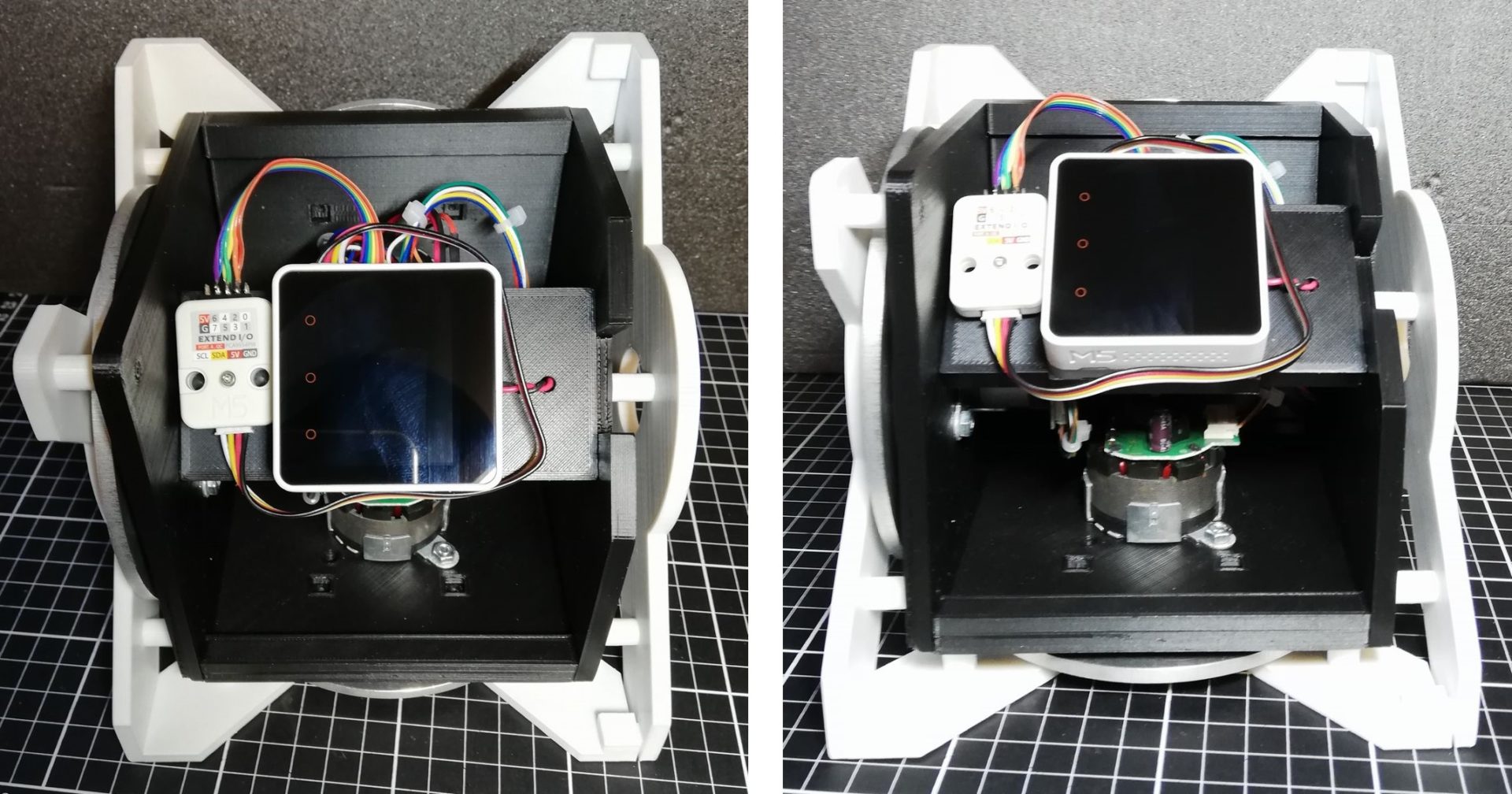
SHISEIGYO-1 構成
SHISEIGYO-1 の構成をおさらいします。
使用しているブラシレスモータには物理的ブレーキはなく、電気的に信号線を遮断するブレーキ信号線のみ存在します。
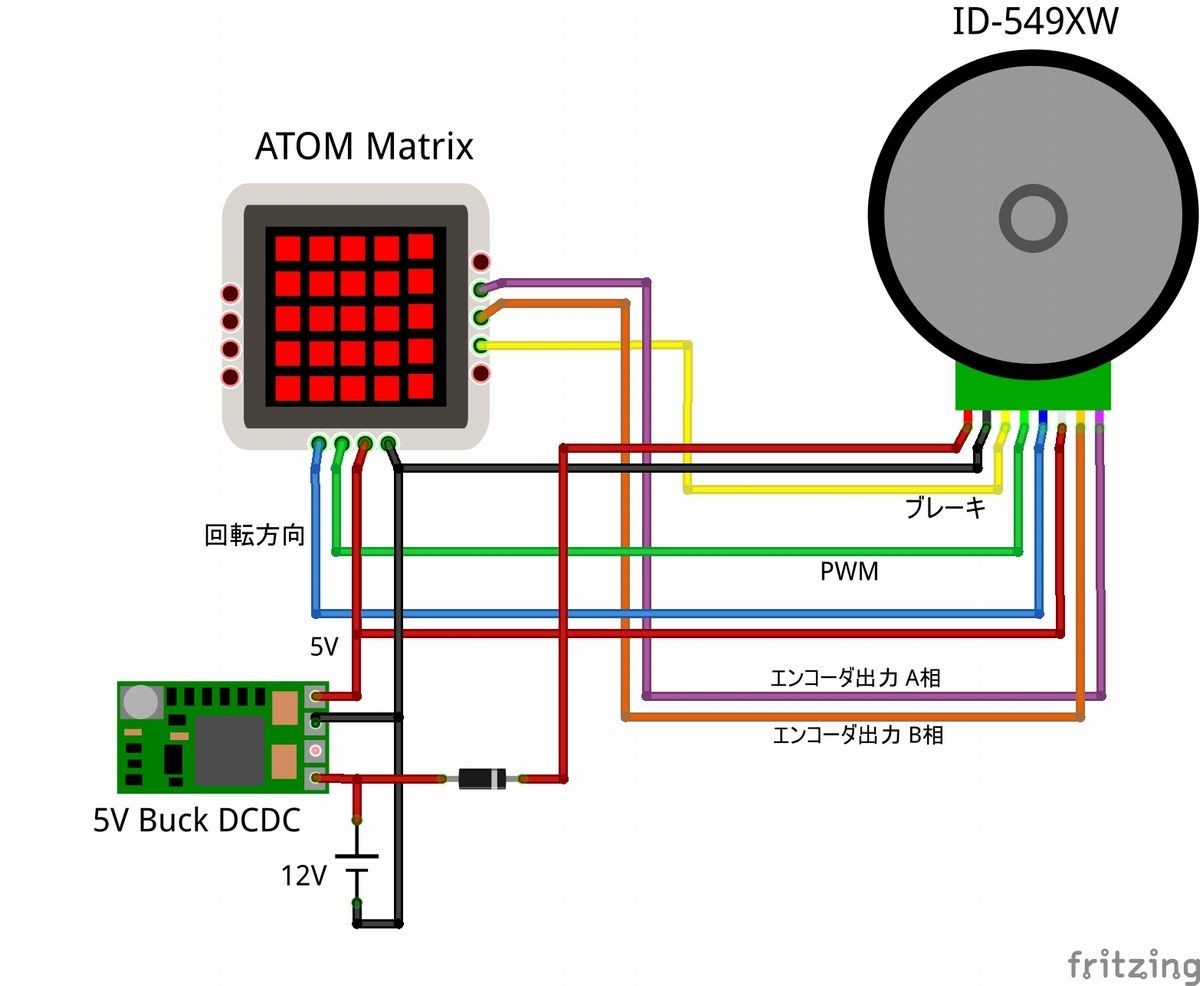
部品
- M5Stack ATOM Matrix
- フライホイール付き ブラシレスモータ ID-549XW
- 降圧DCDCレギュレータ

起き上がり実験
SHISEIGYO-1には物理ブレーキがないので、リアクションホイール停止の際に、
一瞬逆回転させてトルクを稼ぐことにしました。
モータの速度を徐々に最高速度まで加速させて200msec間 逆方向に回転させてみましたが、残念ながらちょっと浮いたくらいで起き上がりには至りませんでした。
M5Stack ATOM MatrixのLEDマトリクスにカウントダウン表示もさせています。
起き上がり起動はスマホアプリのBlynkを用いてBLE通信で実施しています。
なんかさっきのは指で押してるみたいな動画だから
再撮影しました。15°ほど傾ければ起き上がれるの
ほんとだよ。
電磁ブレーキなしの普通のブラシレスモータ。#リアクションホイールへの道#M5Stack #ATOMecho #Blynk pic.twitter.com/tkSLLhvjzS— HomeMadeGarbage (@H0meMadeGarbage) August 12, 2020
あらかじめ15°ほど浮かせて再度試したところ起き上がりが実現できました。
トルクがいま一つ足りてないんですね。。。
そこで安定化電源から供給しているモータの電源電圧を12Vから24Vにあげてみました。
一気にSHISEIGYO-1の可能性が高まりました!
おわりに
なんと起き上がり動作が実現できてしまいました!
次回はいよいよ起き上がりからの倒立を試してみたいと思います。
もしコレが実現できれば、この道は有終の美をもって終えることができるでしょう。
それではまた次の道でお会いしましょう!
次の記事

関連記事
 1軸 姿勢制御モジュール 起き上がりからの倒立 ーリアクションホイールへの道10ー
1軸 姿勢制御モジュール 起き上がりからの倒立 ーリアクションホイールへの道10ー
 1軸 姿勢制御モジュール 倒立精度の向上 ーリアクションホイールへの道11ー
1軸 姿勢制御モジュール 倒立精度の向上 ーリアクションホイールへの道11ー
 1軸 姿勢制御モジュール 物理ブレーキの検証 ーリアクションホイールへの道12ー
1軸 姿勢制御モジュール 物理ブレーキの検証 ーリアクションホイールへの道12ー
 3軸 姿勢制御モジュール SHISEIGYO-3 への挑戦そして挫折 ーリアクションホイールへの道16ー
3軸 姿勢制御モジュール SHISEIGYO-3 への挑戦そして挫折 ーリアクションホイールへの道16ー
 3軸 姿勢制御モジュール SHISEIGYO-3 点倒立の実現 ーリアクションホイールへの道17ー
3軸 姿勢制御モジュール SHISEIGYO-3 点倒立の実現 ーリアクションホイールへの道17ー
 3軸 姿勢制御モジュール SHISEIGYO-3 マイコン削減 ーリアクションホイールへの道19ー
3軸 姿勢制御モジュール SHISEIGYO-3 マイコン削減 ーリアクションホイールへの道19ー
 3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
 3軸 姿勢制御モジュール SHISEIGYO-3 起き上がり点倒立達成 ーリアクションホイールへの道24ー
3軸 姿勢制御モジュール SHISEIGYO-3 起き上がり点倒立達成 ーリアクションホイールへの道24ー
感動しました!!
応援しています。
ありがとうございます!!
とても励みになります!
すごい!新しい可能性を見た気がします!