1軸 姿勢制御モジュール の改良 ーリアクションホイールへの道8ー
本記事にはアフィリエイト広告が含まれます。
前回なんとか1軸 姿勢制御モジュール SHISEIGYO-1を倒立させることができました。
今回はいくつか改良を加えたので報告させていただきます。
目次
LEDインジケータ
以前、ブラシレスモータの回転を測定するためにエンコーダ出力を割り込みセンスしようとM5 ATOM Matrixで attachInterruptを導入したところ、M5Atomライブラリで点灯させていたLEDが異常発光してしまいました。
LEDをoffで対応してたのですが、せっかくのM5 ATOM MatrixのLEDマトリクスがもったいないので、
M5ATOMのMPU6886ライブラリをローカルにコピーしてFastLEDライブラリでLED点灯できるようにしました。
角度インジケータをLEDマトリクスに表示しました。
しょうがないからM5Atom.hインクルードやめて
MPU6886ファイルをローカルにコピーして
無理やりLEDインジケータ復活#リアクションホイールへの道 pic.twitter.com/yEWOz4gJej— HomeMadeGarbage (@H0meMadeGarbage) August 9, 2020
根本原因は不明ですがとりあえず これでOK 😀 !
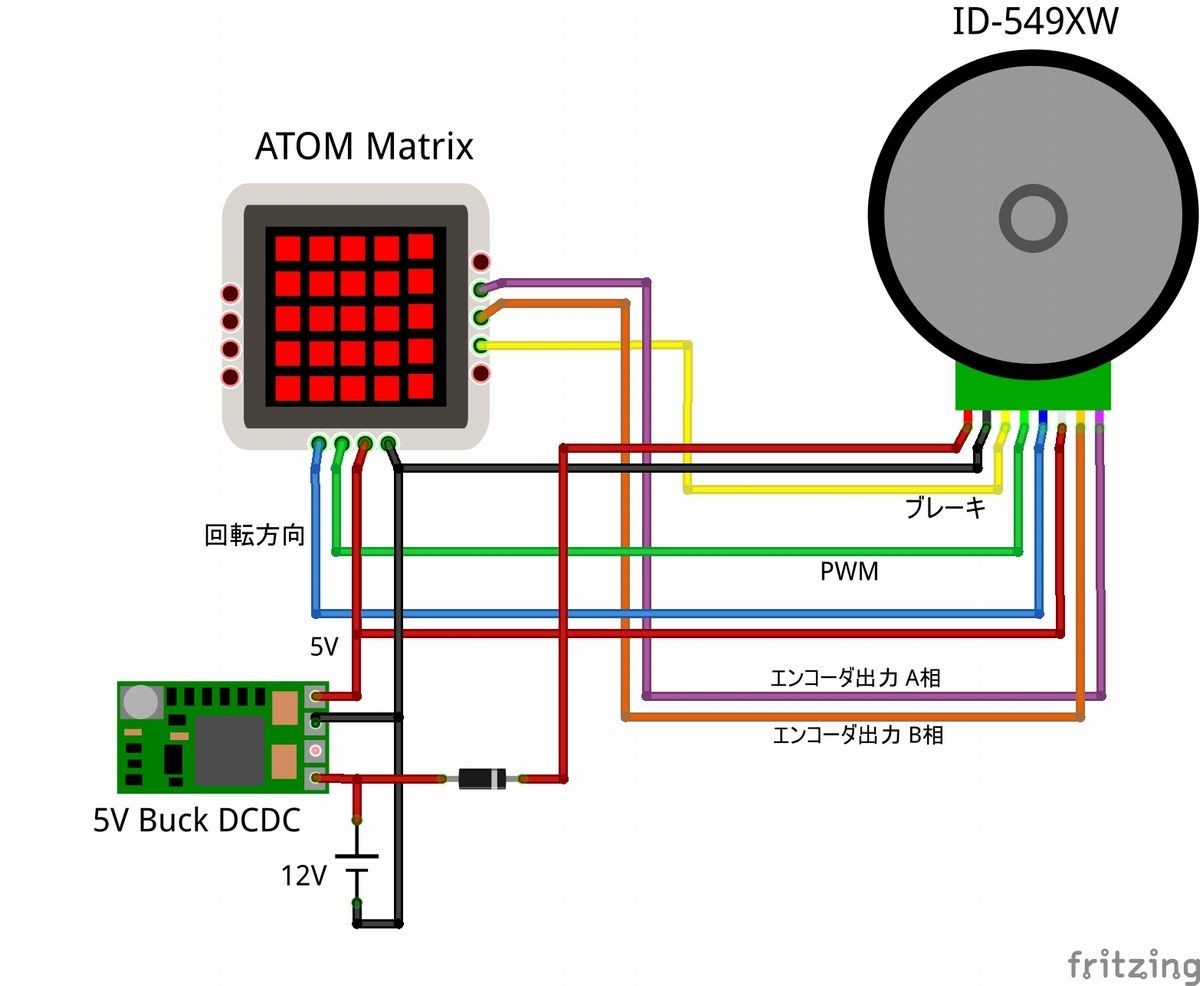
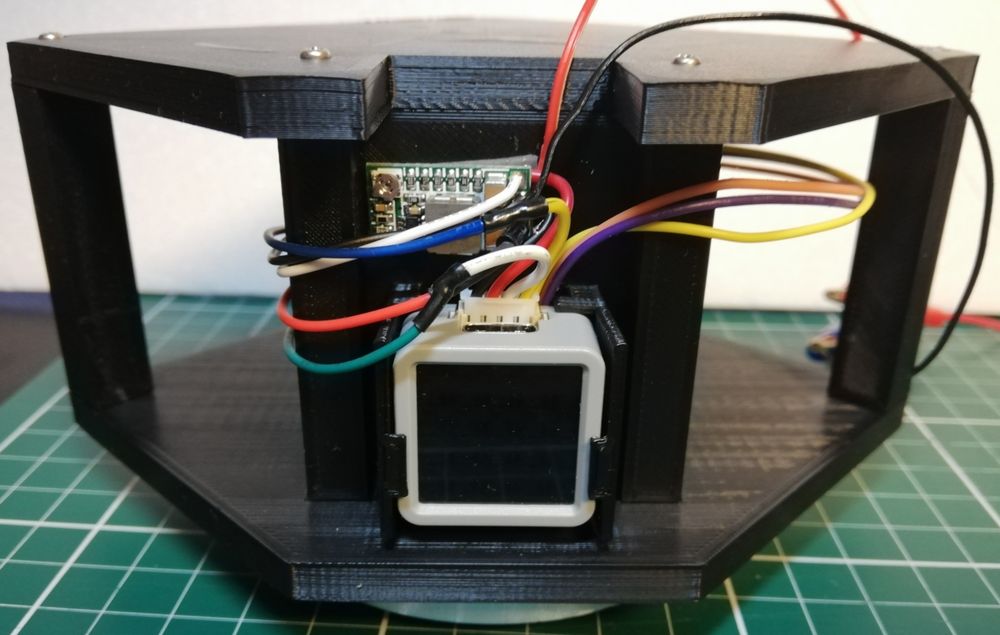
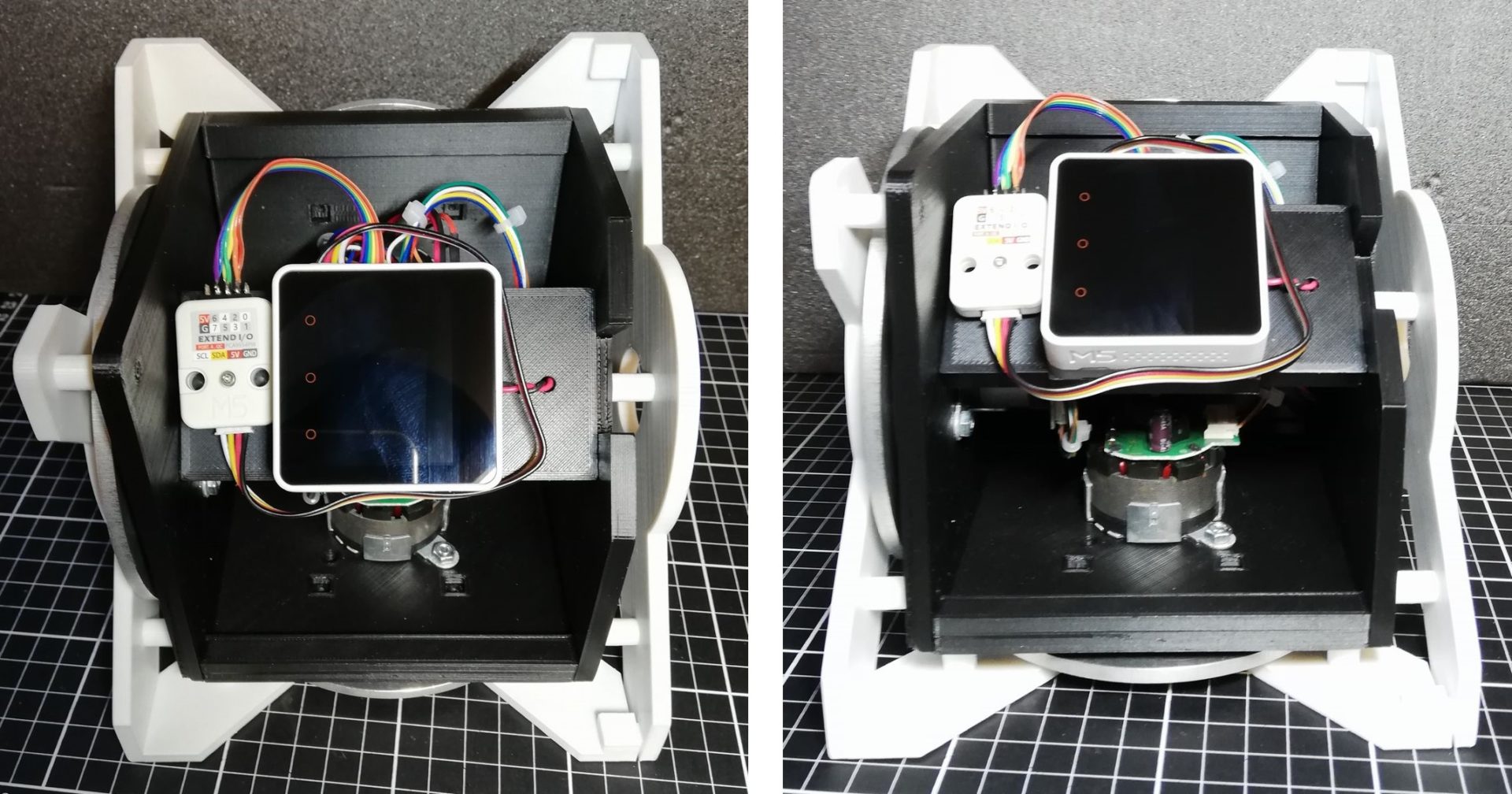
5V 降圧DCDC電源導入
これまではM5 ATOM MatrixにUSBケーブルをさして給電及びシリアル通信していましたが、
5V 降圧DCDC電源を搭載し、シリアル通信はBLEで無線化いたしました。
これでSHISEIGYO-1は安定化電源からの12Vのみで動作できるようになりました。
定数設定のためのBLE通信はスマホアプリのBlynkを用いました。
以下がBlynkのスマホ画面です。
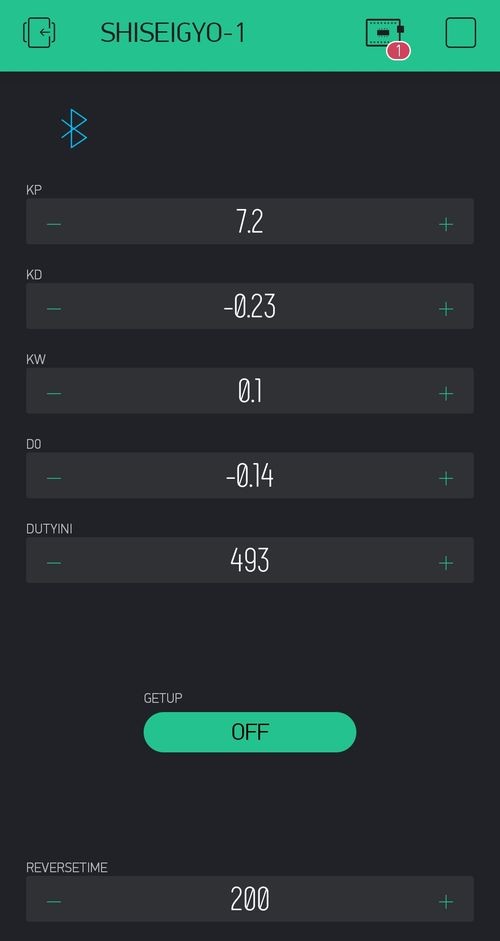
スマホから倒立のための各定数を送信して調整できます。
またGETUPボタンを設け、起き上がり動作も実施できるようにしました。
こちらは次回実験し報告させていただきます。
倒立動作
USBケーブルもなくなりBLE無線でより細かく定数調整できるようになりました。
おわりに
SHISEIGYO-1の倒立安定の向上もはかれましたので、
次回はいよいよ起き上がり実験です。
まだまだ課題は山積み!!
それでは次の道でお会いしましょう!
追記
どういう原理で倒立してる? (20/8/17)
質問いただきましたので追記します。
SHISEIGYO-1 は作用反作用の法則を用いて倒立を維持しています。
傾いた方向にフライホイールを回して反動で起き上がります。
モジュールの傾きやモータ速度を監視しながらモータの回転をうまいこと制御して倒立させています。
以下の記事が参考になります。

次の記事

関連記事
 1軸 姿勢制御モジュール 起き上がり実験 ーリアクションホイールへの道9ー
1軸 姿勢制御モジュール 起き上がり実験 ーリアクションホイールへの道9ー
 1軸 姿勢制御モジュール 起き上がりからの倒立 ーリアクションホイールへの道10ー
1軸 姿勢制御モジュール 起き上がりからの倒立 ーリアクションホイールへの道10ー
 1軸 姿勢制御モジュール 倒立精度の向上 ーリアクションホイールへの道11ー
1軸 姿勢制御モジュール 倒立精度の向上 ーリアクションホイールへの道11ー
 1軸 姿勢制御モジュール 物理ブレーキの検証 ーリアクションホイールへの道12ー
1軸 姿勢制御モジュール 物理ブレーキの検証 ーリアクションホイールへの道12ー
 3軸 姿勢制御モジュール SHISEIGYO-3 への挑戦そして挫折 ーリアクションホイールへの道16ー
3軸 姿勢制御モジュール SHISEIGYO-3 への挑戦そして挫折 ーリアクションホイールへの道16ー
 3軸 姿勢制御モジュール SHISEIGYO-3 点倒立の実現 ーリアクションホイールへの道17ー
3軸 姿勢制御モジュール SHISEIGYO-3 点倒立の実現 ーリアクションホイールへの道17ー
 3軸 姿勢制御モジュール SHISEIGYO-3 マイコン削減 ーリアクションホイールへの道19ー
3軸 姿勢制御モジュール SHISEIGYO-3 マイコン削減 ーリアクションホイールへの道19ー
 3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー