
3軸 姿勢制御モジュール SHISEIGYO-3 への挑戦そして挫折 ーリアクションホイールへの道16ー
本記事にはアフィリエイト広告が含まれます。
以前 1軸の姿勢制御モジュール SHISEIGYO-1 を製作いたしました。
制作レシピは以下で販売しております。
SHISEIGYO-1に使ったブラシレスモータとそのパワーは落ちるがサイズが小さいモータを単体で購入してみました。
モータ単体がやっと届いた
8/22 注文 ロング2個 ショート3個
10/5 着https://t.co/RBlUPVuYSJかなり使用感あり。。
やはり単体だとギアがついてるね。。。
どうしようかな pic.twitter.com/hUryGbYaNC— HomeMadeGarbage (@H0meMadeGarbage) October 5, 2020
単体のモータにはギアがついていたので以下の器具を購入して取り外して使用しました。
また、フライホイールも単体で購入いたしました。
フライホイール単体 D-80mm Hole-5mm 届いた!
8/22 注文 1個 ¥1,519 で2個購入
9/10 着少し薄汚いけど問題なさそう。
モータはまだ来ない。楽しみだ。
より安い部品でレシピが提供できるかもしれない。 https://t.co/WCxlLeQIV8 pic.twitter.com/2B1bTGCFYS— HomeMadeGarbage (@H0meMadeGarbage) September 10, 2020
部品の単体購入の詳細や代替部品情報、皆様のつくれぽ など以下にまとめておりますのでよろしければご覧になってみてください。
モータとフライホイールが複数手に入りせっかくということで
3軸の姿勢制御モジュール SHISEIGYO-3の製作に挑戦いたしましたので報告致します。
目次
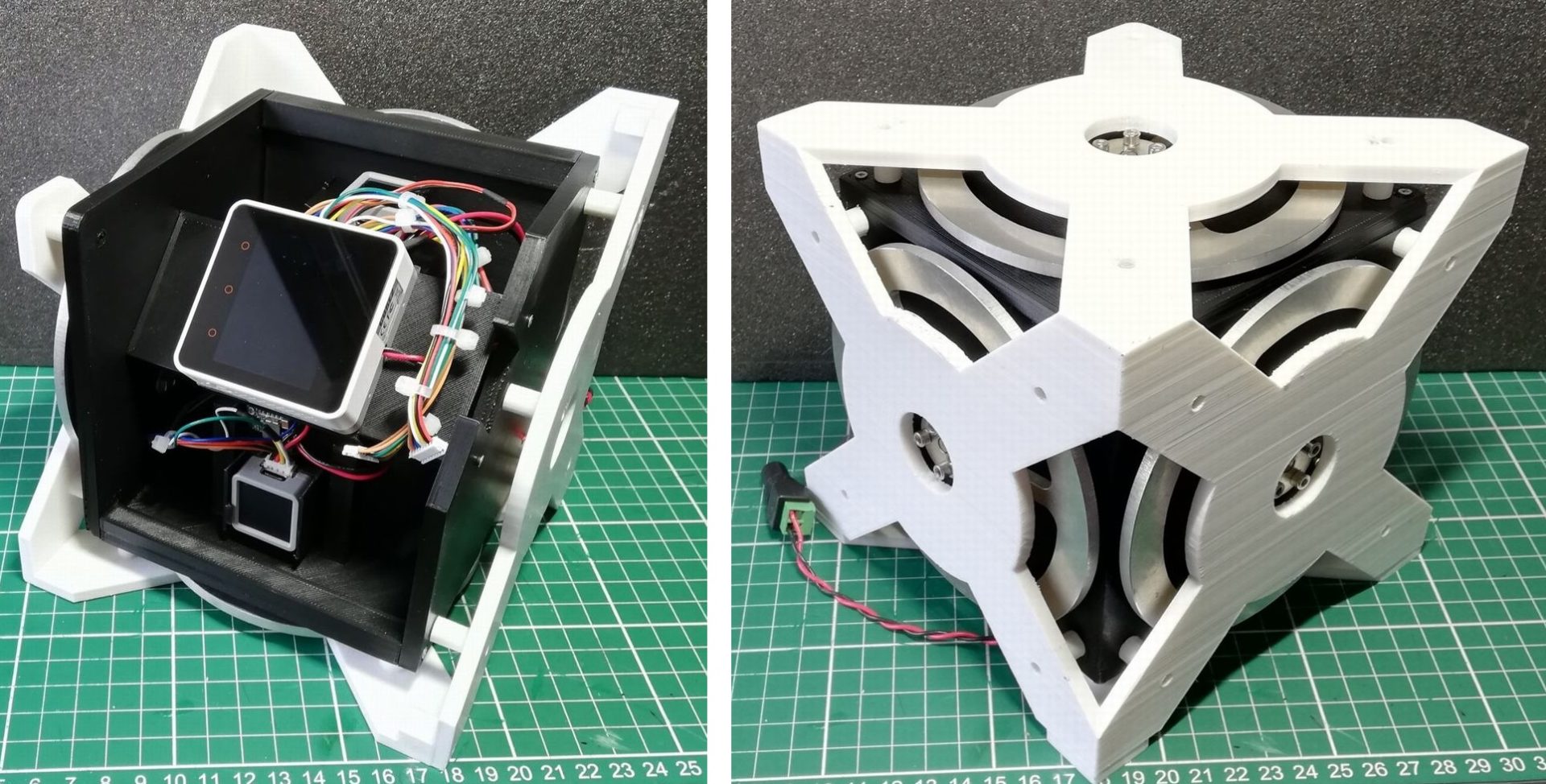
SHISEIGYO-3の筐体
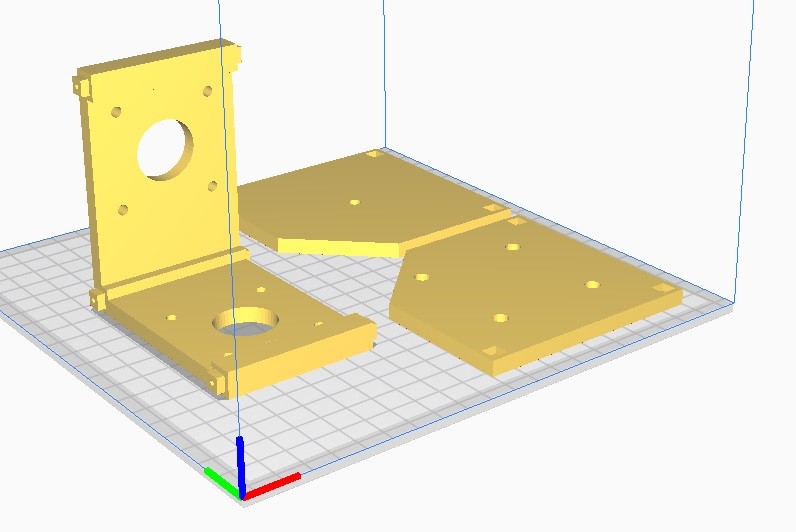
まずは筐体を3Dプリンタで作ってみました。
ブラシレスモータはショートバージョンを3つ使用しています。
筐体の1辺 12cmです。
SHISEIGYO-3の予感#リアクションホイールへの道
音楽:HomeMadeGarbage Sound Tracks
https://t.co/9XMxBe8pcO pic.twitter.com/2DLDLj3Xwr— HomeMadeGarbage (@H0meMadeGarbage) October 15, 2020
上の動画ではとりあえずSHISEIGYO-1のようにATOM Matrixでモータ1つのみ制御して辺倒立させています。
SHISEIGYO-3の制御マイコン検討
モータ3つを制御ということでATOM Matrixではピンが足りません。
I/O拡張ユニットも検討しましたが、2個以上のブラシレスモータ制御にはピンが足りない結果となりました。
ATOM MatrixのIMUのX軸Y軸の傾きでブラシレスモータ正転/逆転させてる。
I/O拡張ユニットもつかって残りのピンは
IO21, 25, 19, 33の4ピンでモータエンコーダのA, B相でそれぞれの回転速度も観れると思ってたら
IMUのI2CがIO21, 25使ってた。。。どないしよ。。#リアクションホイールへの道 pic.twitter.com/5v3WPAuH1w
— HomeMadeGarbage (@H0meMadeGarbage) October 6, 2020
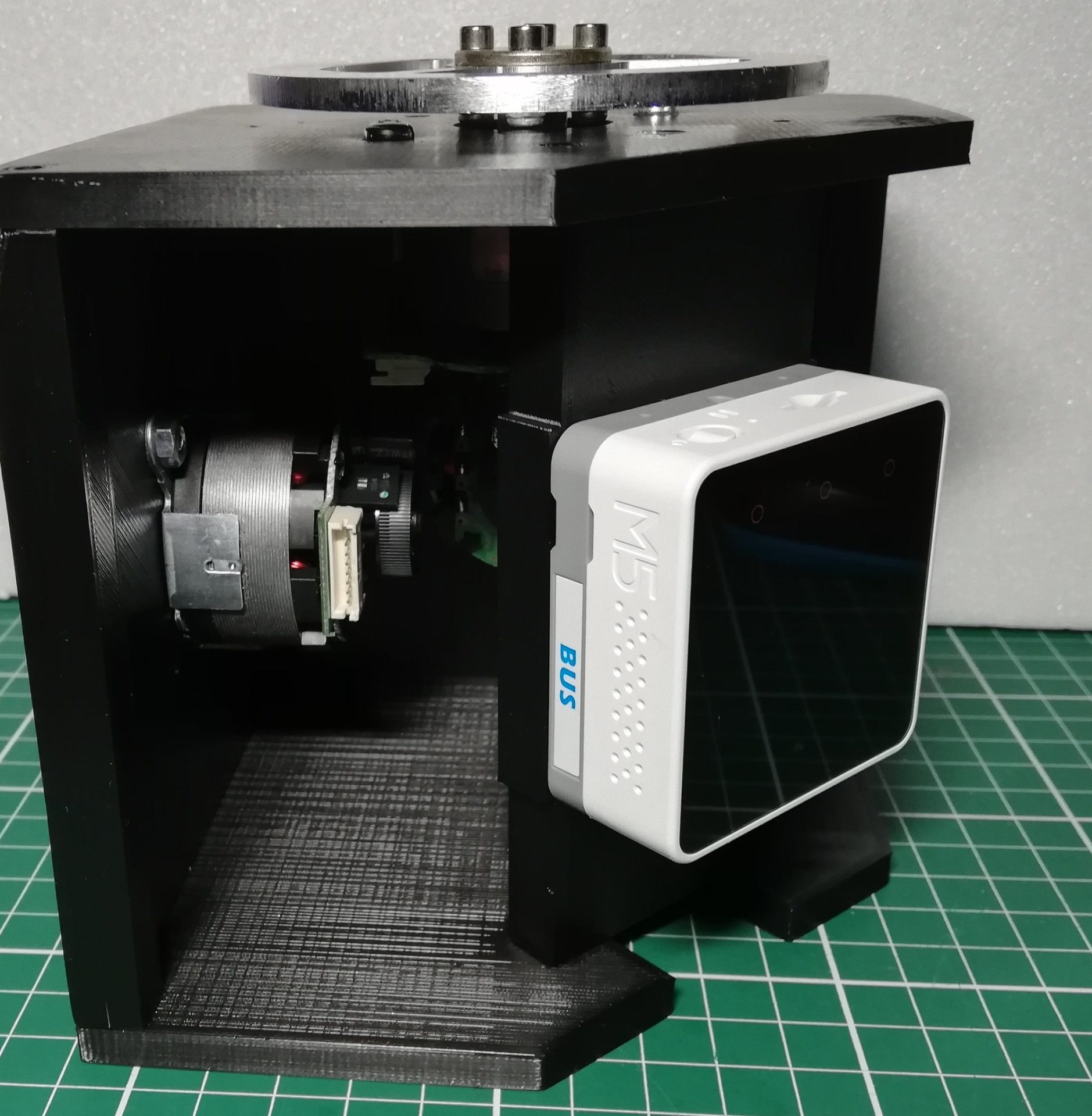
そこで、SHISEIGYO-3 は制御にM5Stack Core2を採用いたしました。
SHISEIGYO-3の制御方針
M5Stack Core2のIMUの軸は以下のような配置でございました。

SHISEIGYO-3の制御方針は以下の通りです。
まずSHISEIGYO-1のように1つのモータでY軸の傾きを制御します。
そして残り2つのモータでX軸方向の傾きを制御して倒立を目指そうと思います。
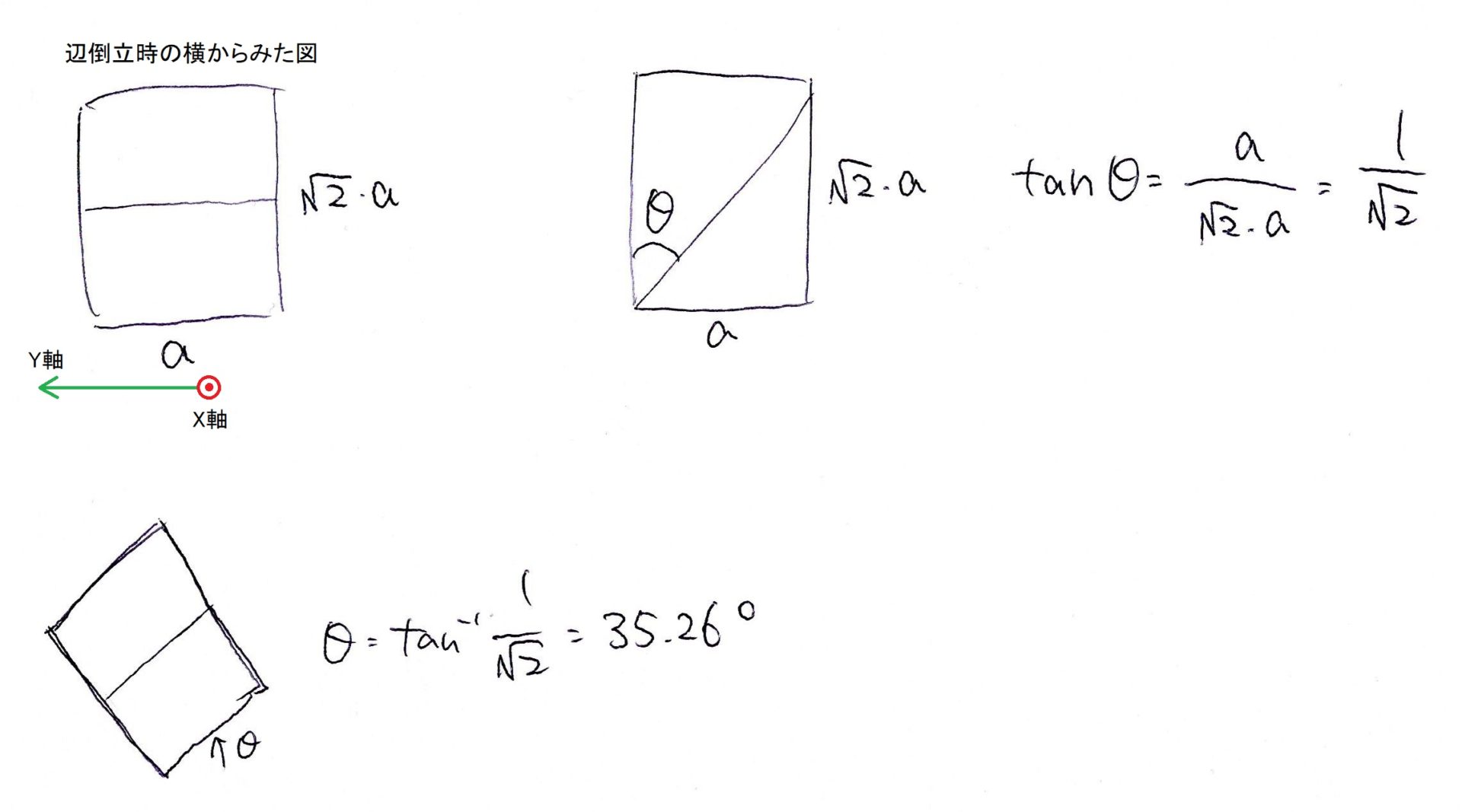
上のように辺の長さaの密度均一な立方体で考えますと、
Y軸45°で辺倒立し、X軸 35.26°で点倒立することになります。
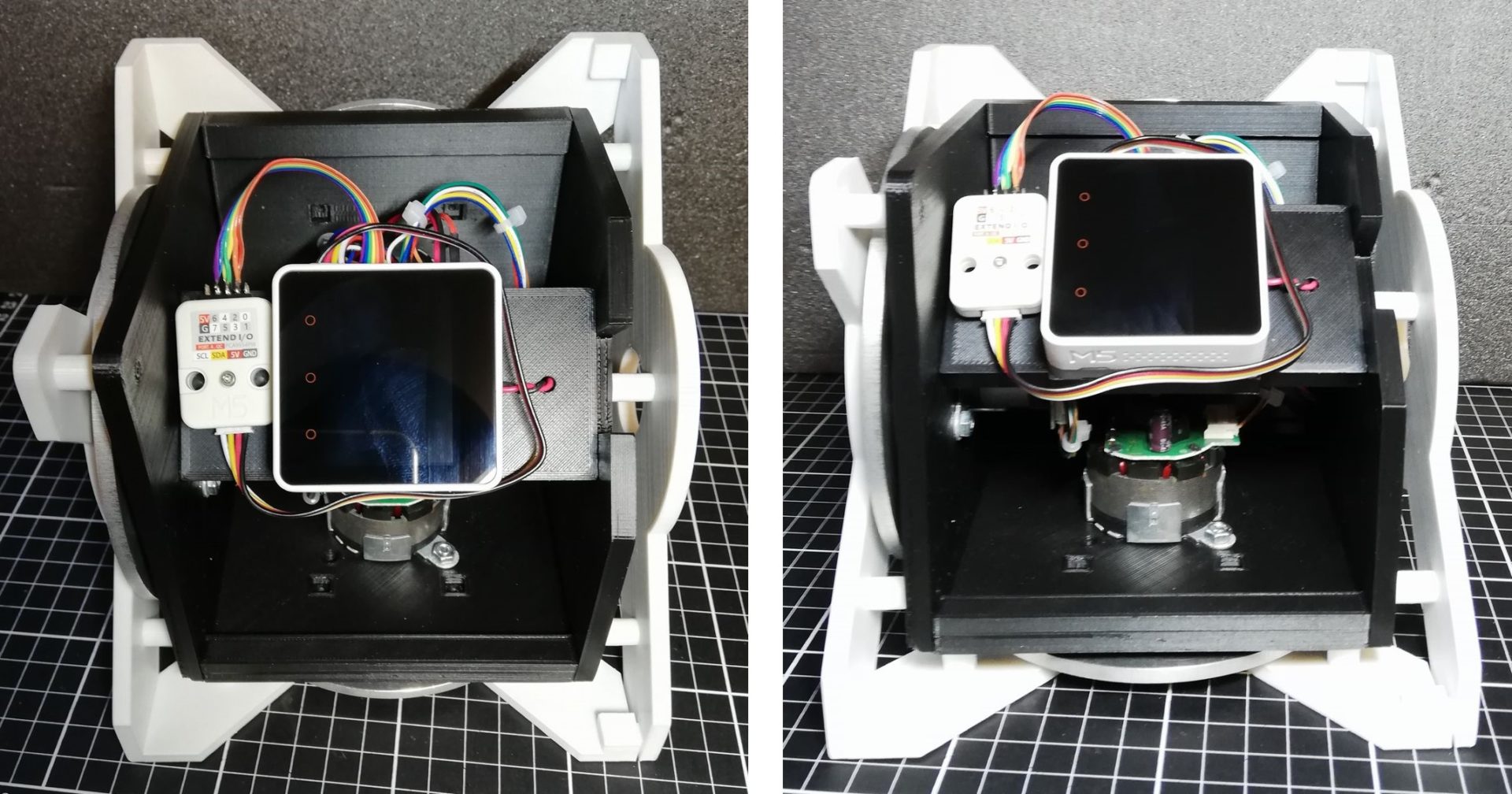
SHISEIGYO-3 製作
M5Stack Core2とモータの配線には M5Stack用BUSモジュール を用いました。
非常に便利でございました。
とりあえず配線は完了#リアクションホイールへの道 pic.twitter.com/DASfwyZfTB
— HomeMadeGarbage (@H0meMadeGarbage) October 20, 2020
M5Stack Core2のディスプレイにはX軸、Y軸の角度を表示します。
マルチコアでディスプレイ表示とモータ制御を同時に実現します。
ちょっとディスプレイは
難しいから後で勉強するとして
とりあえずこれでいいや
明日以降でいよいよモータ複数制御検討に入る。
今日はもういい pic.twitter.com/v7fmI5IcJe— HomeMadeGarbage (@H0meMadeGarbage) October 19, 2020
電源には以下の24V 5AのACアダプタを使用しました。
マイコンには24VをDCDCで5Vにして電源供給しています。
SHISEIGYO-3 倒立実験
まずはY軸の角度をモータ1つで制御します。
とりあえずOK pic.twitter.com/rBHXpBlCgt
— HomeMadeGarbage (@H0meMadeGarbage) October 21, 2020
支えを設けることで、モータ1つでY軸の点倒立姿勢を保つことを確認できました。
次に残りのモータで同じように支えを使用して、X軸の点倒立姿勢の保持を確認しました。
X軸強制ギブス
モータ2個制御
これでパラメータ微調整するのだ#リアクションホイールへの道 pic.twitter.com/CfP1NVztE4— HomeMadeGarbage (@H0meMadeGarbage) October 21, 2020
2個のモータは同じPWM信号を入力して、回転方向のみ反転させています。
以上をマージして全モータ制御で点倒立を目指しましたが。。。
点倒立は実現されることはありませんでした。
過ち
立体物の姿勢を定めるのに2軸の制御じゃダメですよね。。
SHISEIGYO-3は回転するように倒れてしまいました。
やはりモータ3つを独立で制御する必要がありました。。。
参考
おわりに
ちょっと一旦出直してブラシレスモータ3つの独立制御がM5Stack Core2でピン足りるかなど
再度検討進めます。
その前にまた寄り道するかもしれません。。。
追記
R/C アプライザー (20/11/22)
そもそも以下のバイクのおもちゃを観て2軸で点倒立行けると思たのですが。。
移動できる機構ととどまって倒立機構では話が違うんですね。
このバイクを観て
X軸、Y軸の2軸で点倒立できるのではと思い
Y軸をモータ1つでX軸をモータ2つで制御してみたのだけど倒立は達成できなかった。#挫折 #リアクションホイールへの道https://t.co/Y3EhbZMo7p https://t.co/vDbBHKp7ro— HomeMadeGarbage (@H0meMadeGarbage) November 7, 2020
☟分解動画
次の記事

関連記事
 3軸 姿勢制御モジュール SHISEIGYO-3 点倒立の実現 ーリアクションホイールへの道17ー
3軸 姿勢制御モジュール SHISEIGYO-3 点倒立の実現 ーリアクションホイールへの道17ー
 3軸 姿勢制御モジュール SHISEIGYO-3 筐体検討 ーリアクションホイールへの道18ー
3軸 姿勢制御モジュール SHISEIGYO-3 筐体検討 ーリアクションホイールへの道18ー
 3軸 姿勢制御モジュール SHISEIGYO-3 マイコン削減 ーリアクションホイールへの道19ー
3軸 姿勢制御モジュール SHISEIGYO-3 マイコン削減 ーリアクションホイールへの道19ー
 3軸 姿勢制御モジュール SHISEIGYO-3 物理ブレーキ検討 ーリアクションホイールへの道20ー
3軸 姿勢制御モジュール SHISEIGYO-3 物理ブレーキ検討 ーリアクションホイールへの道20ー
 3軸 姿勢制御モジュール SHISEIGYO-3 物理ブレーキ検討2 ーリアクションホイールへの道21ー
3軸 姿勢制御モジュール SHISEIGYO-3 物理ブレーキ検討2 ーリアクションホイールへの道21ー
 3軸 姿勢制御モジュール SHISEIGYO-3 ESP32とMPU6050の使用 ーリアクションホイールへの道22ー
3軸 姿勢制御モジュール SHISEIGYO-3 ESP32とMPU6050の使用 ーリアクションホイールへの道22ー
 3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
 3軸 姿勢制御モジュール SHISEIGYO-3 起き上がり点倒立達成 ーリアクションホイールへの道24ー
3軸 姿勢制御モジュール SHISEIGYO-3 起き上がり点倒立達成 ーリアクションホイールへの道24ー