3軸 姿勢制御モジュール SHISEIGYO-3 点倒立の実現 ーリアクションホイールへの道17ー
本記事にはアフィリエイト広告が含まれます。
前回はM5Stack Core2を用いてモータ3つを制御してSHISEIGYO-3の点倒立を目指しました。
Y軸をモータ1つでX軸をモータ2つで制御して倒立を目指したのですが倒立は達成できず、モータ3つを独立で制御しなくてはならないと結論が出ました。
ここではモータ3つをモジュールの姿勢によって独立制御させて点倒立を目指しましたので報告いたします。
目次
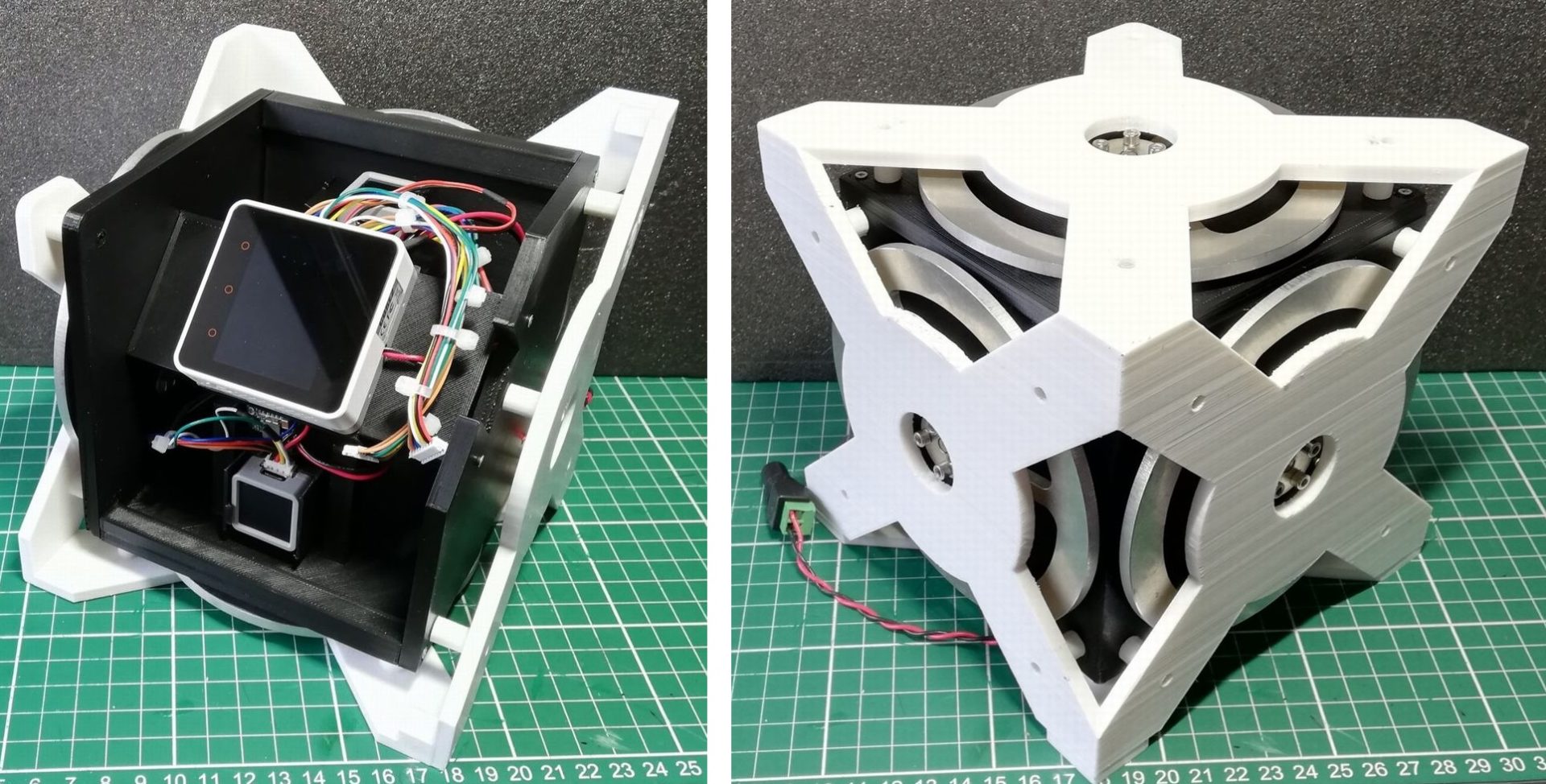
構成
M5Stack Core2 1つでエンコーダ付きブラシレスモータ 3つを独立に制御させるには
ピンのやりくりが少し煩雑になることと姿勢角の各軸への座標変換方法がすぐに思いつかなかったので、
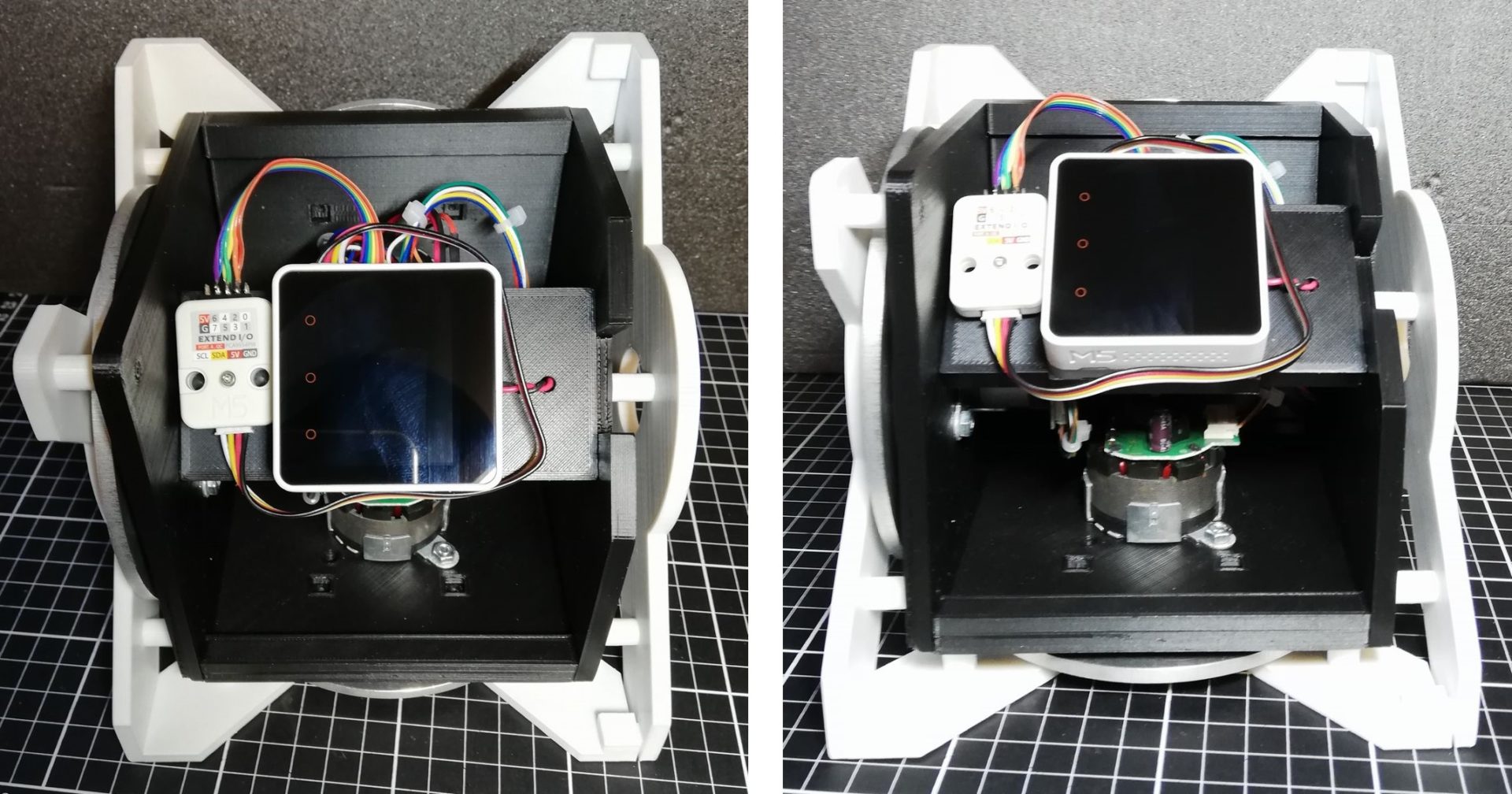
すこし贅沢ですがM5Stack Core2 で1つのモータを制御して、ATOM Matrix 2個を追加して残りモータを制御することにしました。
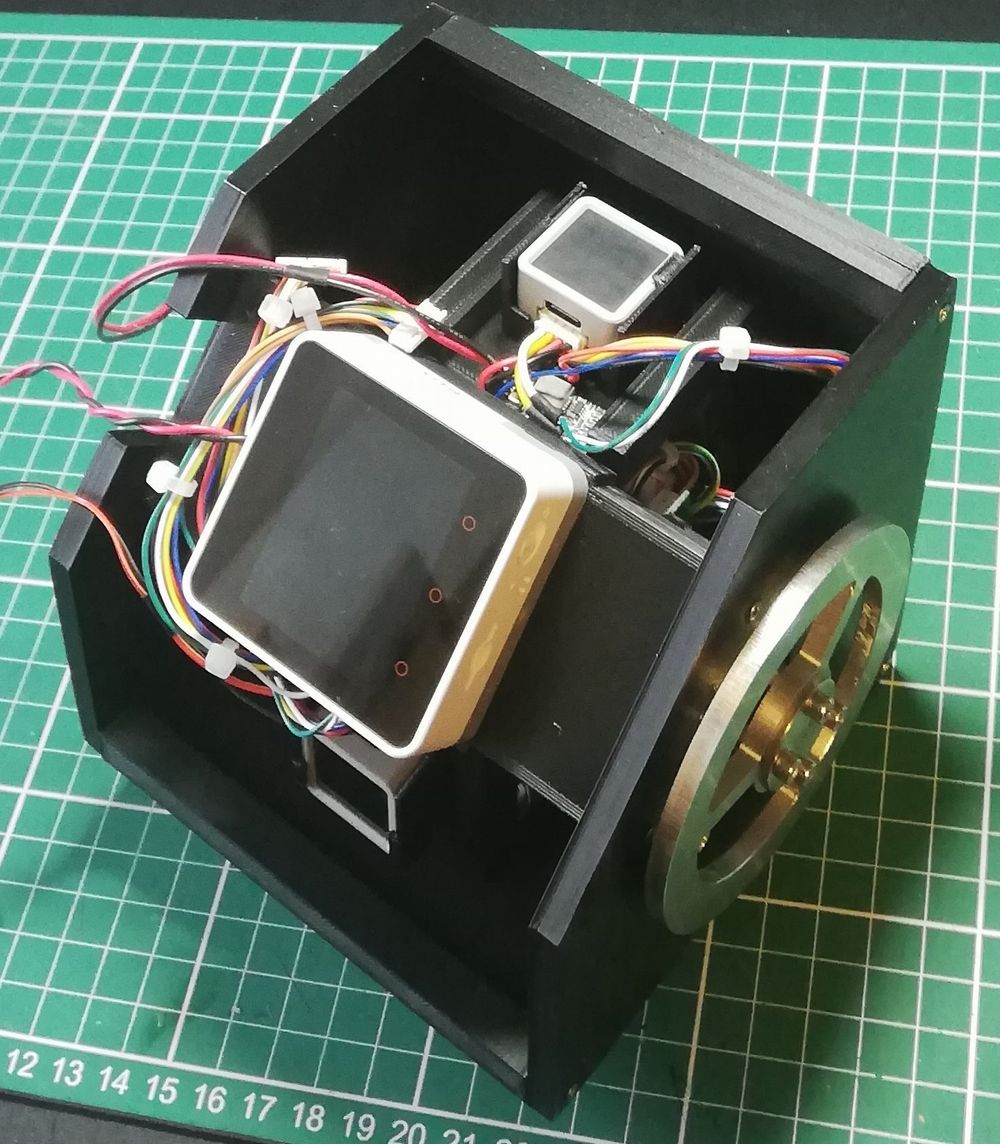
これによって各モータをIMU内蔵マイコン一つずつで制御できます。
それぞれの辺で倒立できるように調整しました。
3辺での倒立はいい感じ
これをどうやって点倒立にもっていくかもう少し雑に立ち上げても立つようにしようかな#リアクションホイールへの道 pic.twitter.com/EraR1zqOlB
— HomeMadeGarbage (@H0meMadeGarbage) November 8, 2020
実験開始
3辺での倒立が確認できモータ3つの独立制御が可能となりましたので、いざ点倒立を目指します。
辺倒立の時点でもっと外乱耐性向上させないと
難しいな#姿勢制御モジュール#リアクションホイールへの道 pic.twitter.com/X72kaHJ6aT— HomeMadeGarbage (@H0meMadeGarbage) November 8, 2020
どうもトルクが足りないようですぐに倒れてしまいます。。
トルク向上
SHISEIGYO-3となって全体の質量が大きく増えたのでこれまでの8cm径のフライホイールではトルクが足りないようです。
以下の通り外乱に非常に弱いです。
ドライバ- コツン
やはり外乱に弱いね
この重量で この可愛い8cmホイールじゃトルク足りないね。。#SHISEIGYO3#姿勢制御モジュール#リアクションホイールへの道 pic.twitter.com/kB12WiPu4m— HomeMadeGarbage (@H0meMadeGarbage) November 9, 2020
そこでフライホイールを12㎝径のものに交換してみました。
こんなこともあろうかと大きめのフライホイールも買っておいたのです。
D-120mm Hole-5mmhttps://t.co/N9EJd6xG5v
10/14購入
10/31着#SHISEIGYO3#姿勢制御モジュール#リアクションホイールへの道 pic.twitter.com/ThNodSPxSF— HomeMadeGarbage (@H0meMadeGarbage) November 9, 2020
外乱に非常に強くなりました。
フライホイール径 8cm→12cmに変更
無敵#SHISEIGYO3#姿勢制御モジュール#リアクションホイールへの道 pic.twitter.com/WralGtBQje
— HomeMadeGarbage (@H0meMadeGarbage) November 9, 2020
点倒立実現
フライホイールのサイズを大きくしてトルクが増し安定性が向上しましたので
再度 点倒立に挑戦します。
ついに点倒立が実現されました!!!
嬉しい 😀 !!
課題
点倒立が実現され更なる課題と欲が私を襲います。
筐体検討
まずフライホイールがでかくなったので、むき出しはやはり非常に危険です。。。
いい感じの筐体の設計が急務です。
ただの危険物じゃないか。。
いい加減 筐体考えなきゃ#SHISEIGYO3#姿勢制御モジュール#リアクションホイールへの道 pic.twitter.com/a6mVT2VJzz— HomeMadeGarbage (@H0meMadeGarbage) November 9, 2020
点倒立安定性向上
現状では長時間の点倒立ができないので調整が必要です。
筐体Fix後に微調整したいと思います。
マイコン削減
現状ではM5Stack Core2とATOM Matrixを2個も使用して、なんだか贅沢すぎるので、
M5Stack Core2ひとつでのモータ3個の独立制御を検討したいです。
ひとつのIMUで加速度と角速度を各軸に変換する方法を学習・検討し、
M5Stack Core2のピン配も検討して実現を目指したいと考えております。
起き上がり点倒立
これは非常に難しいかもしれませんが、やはり起き上がり点倒立は目指したいです。
SHISEIGYO-1のようにブレーキなしでいけるか、または物理ブレーキの検討が必要かよく吟味したいです。
おわりに
ついに憧れの点倒立が実現されました!
ともなって課題もたくさんできましたので楽しんで進んでまいります!
それでは次の道でお会いしましょう。
次の記事

関連記事
 3軸 姿勢制御モジュール SHISEIGYO-3 への挑戦そして挫折 ーリアクションホイールへの道16ー
3軸 姿勢制御モジュール SHISEIGYO-3 への挑戦そして挫折 ーリアクションホイールへの道16ー
 3軸 姿勢制御モジュール SHISEIGYO-3 筐体検討 ーリアクションホイールへの道18ー
3軸 姿勢制御モジュール SHISEIGYO-3 筐体検討 ーリアクションホイールへの道18ー
 3軸 姿勢制御モジュール SHISEIGYO-3 マイコン削減 ーリアクションホイールへの道19ー
3軸 姿勢制御モジュール SHISEIGYO-3 マイコン削減 ーリアクションホイールへの道19ー
 3軸 姿勢制御モジュール SHISEIGYO-3 物理ブレーキ検討 ーリアクションホイールへの道20ー
3軸 姿勢制御モジュール SHISEIGYO-3 物理ブレーキ検討 ーリアクションホイールへの道20ー
 3軸 姿勢制御モジュール SHISEIGYO-3 物理ブレーキ検討2 ーリアクションホイールへの道21ー
3軸 姿勢制御モジュール SHISEIGYO-3 物理ブレーキ検討2 ーリアクションホイールへの道21ー
 3軸 姿勢制御モジュール SHISEIGYO-3 ESP32とMPU6050の使用 ーリアクションホイールへの道22ー
3軸 姿勢制御モジュール SHISEIGYO-3 ESP32とMPU6050の使用 ーリアクションホイールへの道22ー
 3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
 3軸 姿勢制御モジュール SHISEIGYO-3 起き上がり点倒立達成 ーリアクションホイールへの道24ー
3軸 姿勢制御モジュール SHISEIGYO-3 起き上がり点倒立達成 ーリアクションホイールへの道24ー