姿勢制御モジュール SHISEIGYO-1R 爆誕 ーリアクションホイールへの道15ー
本記事にはアフィリエイト広告が含まれます。
前回ついにSHISEIGYO-1が完成いたしました。
ここからは当初の目的であった、以前製作したスマート靴占い装置への実装に向けて歩んでいきたいと思います。
靴を空中に投げた際にその地点の明日の天候データを受信し、リアクションホイールで靴の着地姿勢を制御したいのです。
1回目の リアクションホイールへの道 でも書いてるけど
https://t.co/kEVOHadyim私の姿勢制御モジュールのゴールはスマート靴占い装置の
真の完成です。
https://t.co/gBdKkqMCo1このクソダサくて邪魔なアクリルプロペラをどうにかしたいのです。 pic.twitter.com/Y9ODXfd8iM
— HomeMadeGarbage (@H0meMadeGarbage) August 25, 2020
目次
SHISEIGYO-1R
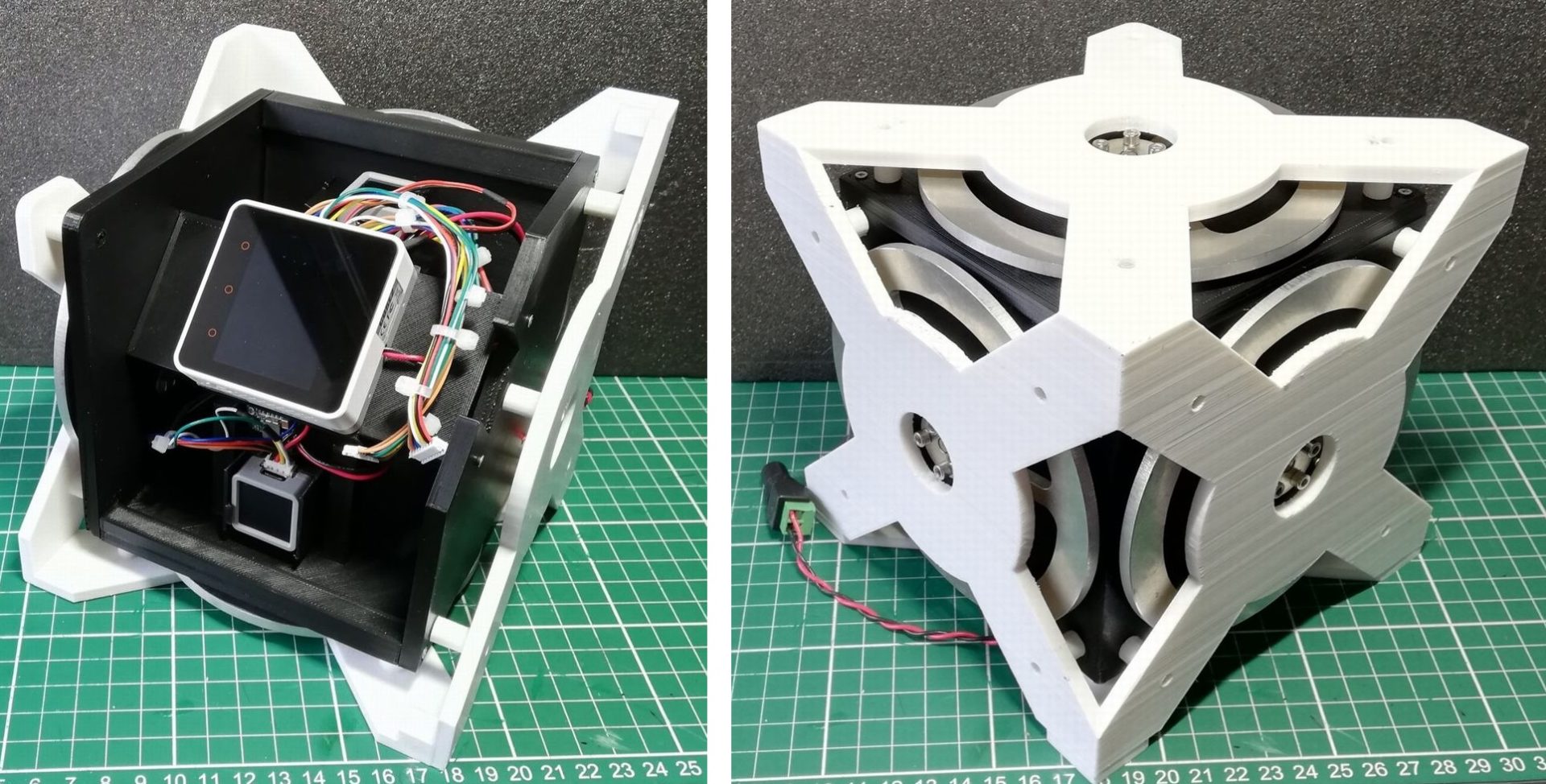
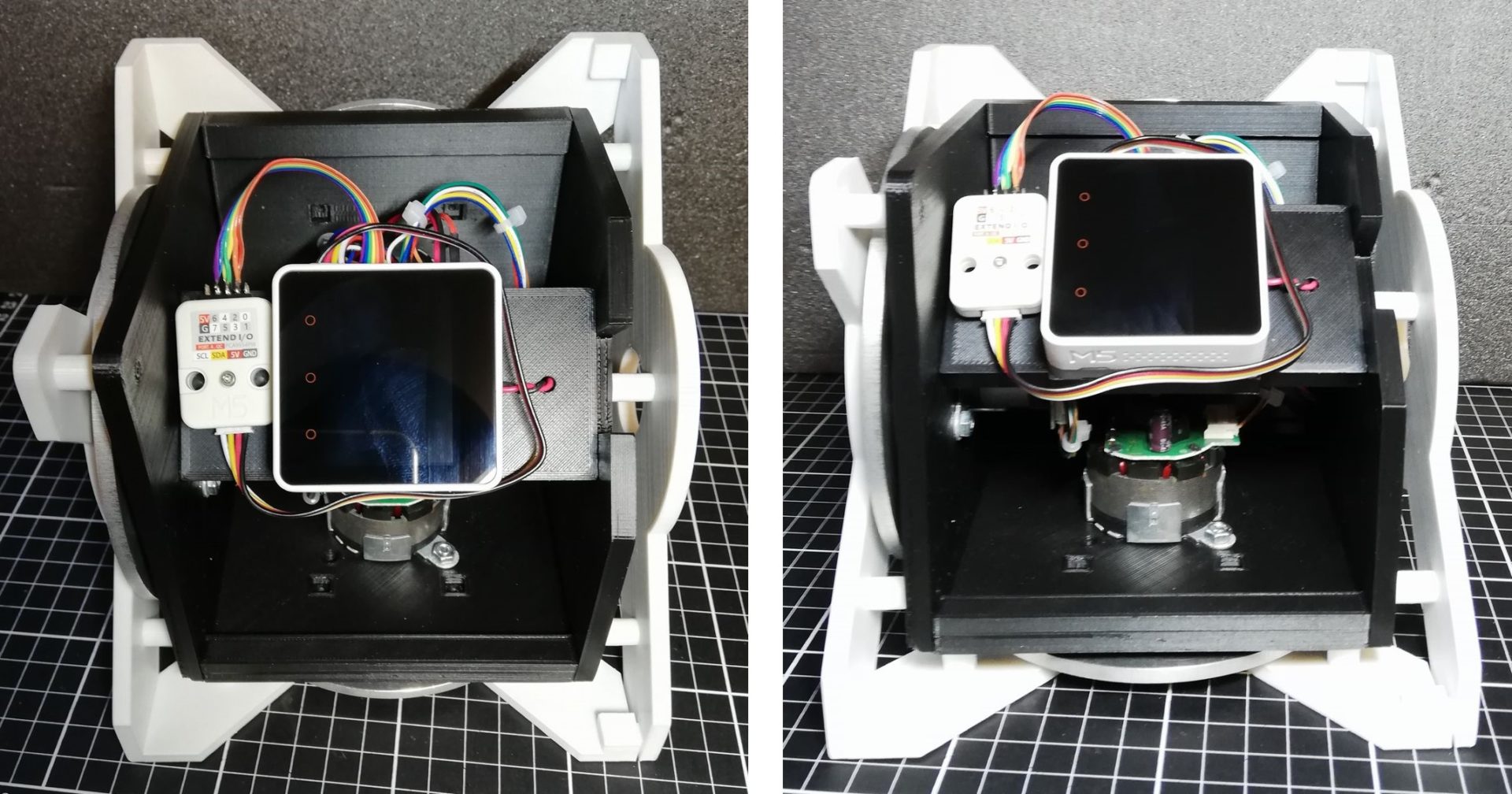
靴の姿勢を変えたいだけなのでSHISEIGYO-1のようにわざわざ四角にする必要はないと考え
丸い筐体を3Dプリンタで製作してみました。
SHISEIGYO-1R pic.twitter.com/R0DS7lWSyE
— HomeMadeGarbage (@H0meMadeGarbage) August 24, 2020
丸くて可愛くできました!
SHISEIGYO-1R (シセーギョーワンアール)と名付けました!
とりあえず動かした
丸くすれば余裕で所望の角度に姿勢制御できる
と思ったのに
ただのセミファイナルで泣いてる#リアクションホイールへの道 pic.twitter.com/mVkOU4ZItE— HomeMadeGarbage (@H0meMadeGarbage) August 24, 2020
もうダダ滑り。。。まるで間際のセミよ。。。。
お滑り防止加工
SHISEIGYO-1でも実績のあるTPUフィラメントで0.4mmシートをプリントして両面テープで貼り付けました。

なんかアスパラベーコンみたい。。。
動作
滑りも改善し、まだ適当な制御ですがそれなりに動いてくれています♪
スマホアプリBlynkのスライダからBLEで角度を送っています。
制御方法の概要
現状は以下のようにモータに入力するPWM信号のデューティを制御しています。
$$Duty ∝ K_{d1}・(θ_b + \Delta θ) + K_{d2}・\dotθ_b + K_{d3}・\dotθ_w$$
基本的にはSHISEIGYO-1と同じ制御ですがモジュール姿勢角$θ_b$に、
オフセットとして$\Delta θ$をBlynkから送って姿勢を変えてみました。
割とイケているので以後これをブラッシュアップしていきたいと思います。
おわりに
ここではSHISEIGYO-1Rの誕生を報告させていただきました。
以降は姿勢制御の精度を上げるべくもろもろ試していきたいと思います!!
それではまた次の道でお会いしましょう!!
追記
Inverted angle Dynamic Readjustment System導入
【SHISEIGYO-1R 】
倒立角動的再調整システム(IDRS)を搭載することで
傾きが大きくてもホイールの回転が抑制され
実に制御しやすくなった♪#成長SHISEIGYO-1Rについては☟
https://t.co/whH1ZFTxwdInverted angle Dynamic Readjustment System (IDRS)については☟
https://t.co/LHXohospPx pic.twitter.com/WDEFvLH1Mx— HomeMadeGarbage (@H0meMadeGarbage) December 10, 2020
次の記事

関連記事
 1軸 姿勢制御モジュール 物理ブレーキの検証 ーリアクションホイールへの道12ー
1軸 姿勢制御モジュール 物理ブレーキの検証 ーリアクションホイールへの道12ー
 3軸 姿勢制御モジュール SHISEIGYO-3 への挑戦そして挫折 ーリアクションホイールへの道16ー
3軸 姿勢制御モジュール SHISEIGYO-3 への挑戦そして挫折 ーリアクションホイールへの道16ー
 3軸 姿勢制御モジュール SHISEIGYO-3 点倒立の実現 ーリアクションホイールへの道17ー
3軸 姿勢制御モジュール SHISEIGYO-3 点倒立の実現 ーリアクションホイールへの道17ー
 3軸 姿勢制御モジュール SHISEIGYO-3 筐体検討 ーリアクションホイールへの道18ー
3軸 姿勢制御モジュール SHISEIGYO-3 筐体検討 ーリアクションホイールへの道18ー
 3軸 姿勢制御モジュール SHISEIGYO-3 マイコン削減 ーリアクションホイールへの道19ー
3軸 姿勢制御モジュール SHISEIGYO-3 マイコン削減 ーリアクションホイールへの道19ー
 3軸 姿勢制御モジュール SHISEIGYO-3 物理ブレーキ検討 ーリアクションホイールへの道20ー
3軸 姿勢制御モジュール SHISEIGYO-3 物理ブレーキ検討 ーリアクションホイールへの道20ー
 3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
 3軸 姿勢制御モジュール SHISEIGYO-3 起き上がり点倒立達成 ーリアクションホイールへの道24ー
3軸 姿勢制御モジュール SHISEIGYO-3 起き上がり点倒立達成 ーリアクションホイールへの道24ー