2軸 姿勢制御モジュール SHISEIGYO-CORE2 爆誕 ーリアクションホイールへの道30ー
本記事にはアフィリエイト広告が含まれます。
以前 SHISEIGYO-3 開発中にM5Stack CORE2 を壊してしまいました。
そうしましたところナント! M5Stack様よりM5Stack CORE2 をご提供いただきました!
有難いことにM5Stack様より
M5Stack CORE2を再び提供いただきました。次は絶対に壊さないように気をつけます。
ありがたく活用させていただきます!#感謝 #喜び pic.twitter.com/G4FMwAmYiM— HomeMadeGarbage (@H0meMadeGarbage) January 12, 2021
本当にありがとうございます 🙂 !!こういった援助は非常に助かります。

ここでは前にAdafruit CLUE を用いて製作した2軸姿勢制御モジュール SHISEIGYO-2をM5Stack CORE2 で作ってみましたので報告いたします。
SHISEIGYO-CORE2の爆誕でございます。
目次
SHISEIGYO-CORE2製作
フライホイール2個をM5Stack CORE2で制御します。
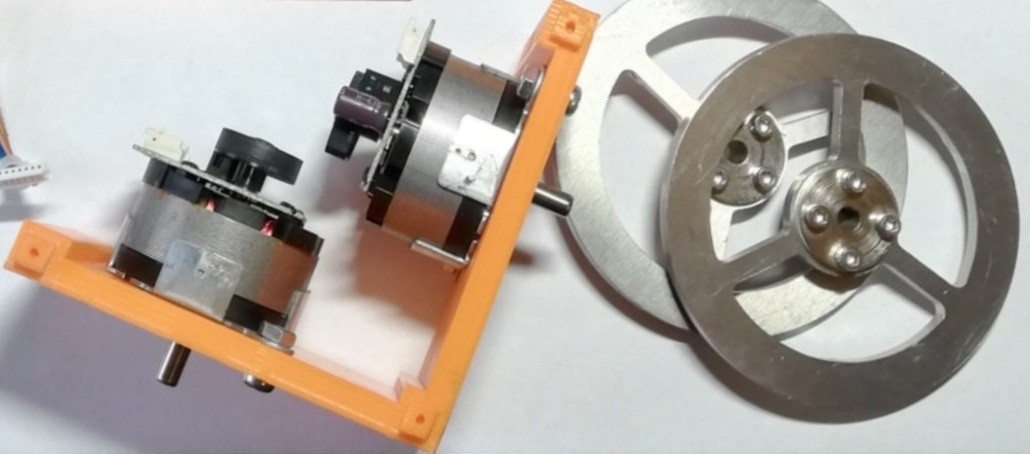
モータの接続用端子や5V降圧DCDCはM5Stack用BUSモジュールに実装してM5Stack CORE2に接続しました。
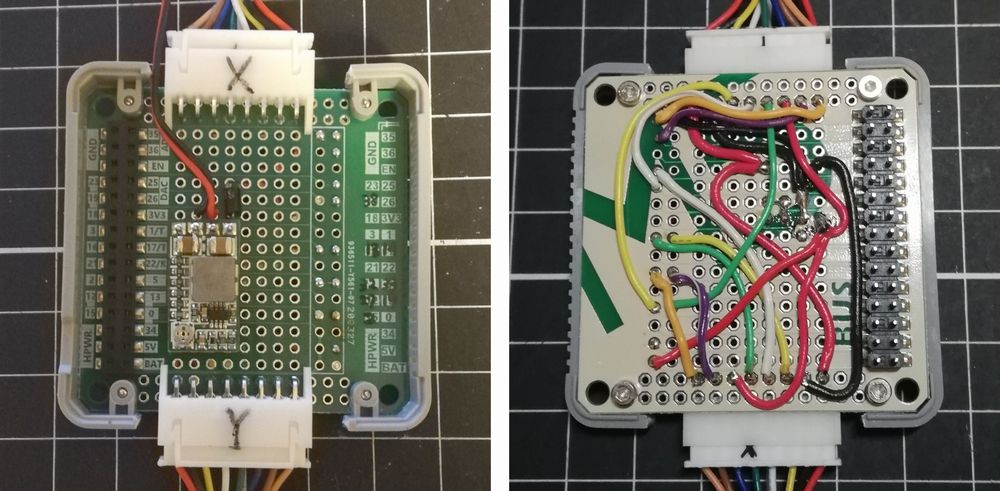

電源は外部から24V ACアダプタから供給して、モータ用電源としています。
24VからDCDCで5V生成してM5Stack CORE2に給電します。
M5Stack CORE2には6軸IMUセンサ MPU6886が搭載されており、平面状の2軸(x, y)のセンサ値でそれぞれのモータを制御します。

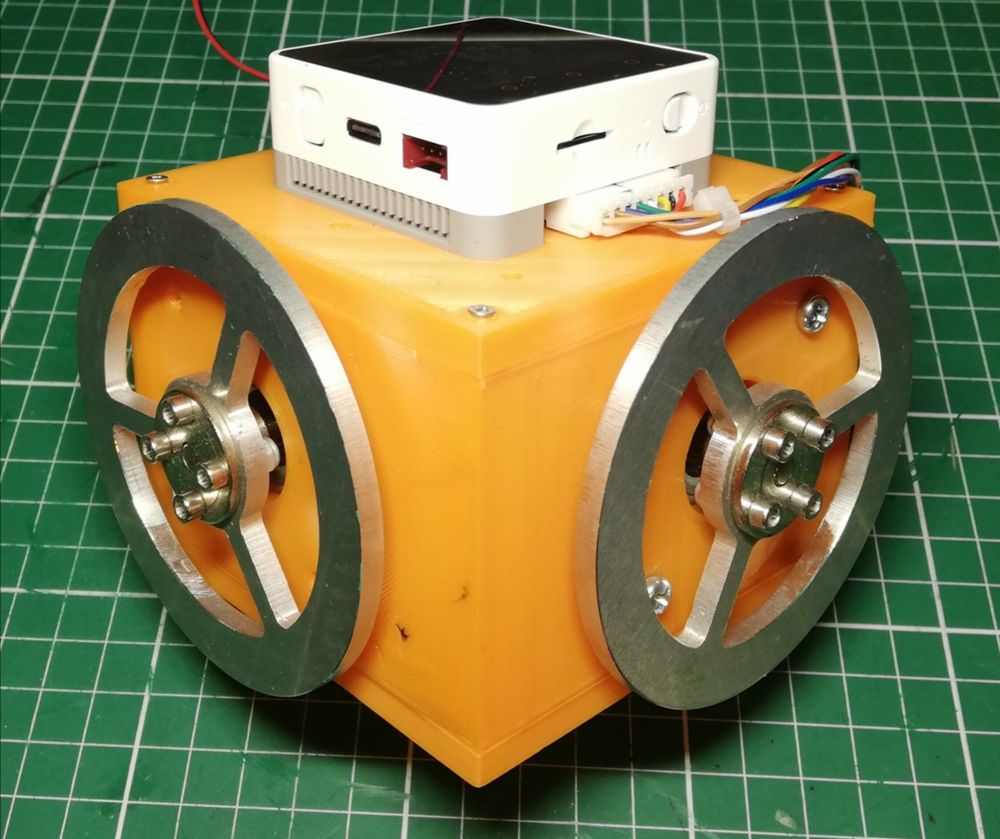
完成!
動作
Adafruit CLUE 版ではディスプレイ表示のために遅延が発生しバランスが若干不安定でしたが、M5Stack CORE2はESP32が搭載されているのでデュアルタスクでディスプレイ表示とモータ制御実施で非常に安定しています。
起き上がり動作も現在調整中です。
下の動画は板をしいて少しモジュールを起こした状態での起き上がり動作です。
おわりに
今回は提供いただいたM5Stack CORE2で2軸姿勢制御モジュールを製作してみました。
まだまだ起き上がり動作の調整やディスプレイ表示のちらつき改善など課題がございますので、検討進めたいと思います!
懐かしき
この感じ!#M5StackCORE2 pic.twitter.com/d5ov2ePDTp— HomeMadeGarbage (@H0meMadeGarbage) January 12, 2021
それでは次の道で!!
次の記事

関連記事
 2軸 姿勢制御モジュール SHISEIGYO-CORE2 完成 ーリアクションホイールへの道31ー
2軸 姿勢制御モジュール SHISEIGYO-CORE2 完成 ーリアクションホイールへの道31ー
 SHISEIGYO-2 を改良しました ーリアクションホイールへの道36ー
SHISEIGYO-2 を改良しました ーリアクションホイールへの道36ー
 SHISEIGYO-2 Go 爆誕 ーリアクションホイールへの道39ー
SHISEIGYO-2 Go 爆誕 ーリアクションホイールへの道39ー
 SHISEIGYO-2 Go ホイール検討 球状歯車を味見 ーリアクションホイールへの道40ー
SHISEIGYO-2 Go ホイール検討 球状歯車を味見 ーリアクションホイールへの道40ー
 SHISEIGYO-2 Go 球体ホイールを検討 ーリアクションホイールへの道41ー
SHISEIGYO-2 Go 球体ホイールを検討 ーリアクションホイールへの道41ー
 一脚 屈伸ロボ 爆誕
一脚 屈伸ロボ 爆誕
 3軸 姿勢制御モジュール SHISEIGYO-3 ESP32とMPU6050の使用 ーリアクションホイールへの道22ー
3軸 姿勢制御モジュール SHISEIGYO-3 ESP32とMPU6050の使用 ーリアクションホイールへの道22ー
 3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
いつも楽しみに拝見しております。
SHISEIGYO-1 が割りとすんなりクリアできたので、このレシピが出ているのを見て早速購入しました。
BUS モジュールの配線も何とかクリアし、端子間の通電も確認しました。
電源を入れ、M5Stack CORE2 の画面もレシピ通りとなりますが、モーターがピクリとも動きません。
何が不具合なのかチェックするポイントをご教示の程お願い致します。
誠にありがとうございます。
モータ電源線に24V供給されてるかなどをラインで確認するなどでしょうか。
もしくは簡単にモータのみ動作されるコードを描いてみるとよいかもしれません。
以下をループさせるなど。
//反時計回り
digitalWrite(brakeX, HIGH);
digitalWrite(brakeY, HIGH);
digitalWrite(rote_pinX, LOW);
digitalWrite(rote_pinY, LOW);
ledcWrite(CH_X, 900);
ledcWrite(CH_Y, 900);
delay(1000);
//停止
digitalWrite(brakeX, LOW);
digitalWrite(brakeY, LOW);
delay(1000);
X軸のブレーキラインが接続されていないことが判明し修正しました。
電源を入れ、初期化後ゆっくり起きあげると、X軸、Y軸が0度になるまで停止状態で、少し傾けると両軸とも高速回転となり安定しません。
ここまでの動作は正常でしょうか?
パラメーターの調整が必要とありますが、具体的な調整方法をご教示いただけると幸いです。
動作としては正しいです。
X軸、Y軸が0度になるように置き上げて、素早く手を放す必要があります。
安定性の調整に大きく影響する変数は以下の3つです。
Kp、Kd、Kw
倒立できました!
レシピの設定からスタートし、一瞬立つところまではすんなりといったのですが、それから丸一日かかりました。
時間が掛かった分達成感も大きいです。
もうすでに3軸制御へのチャレンジも始めていたのですが、これからは集中して取り組みができます。
ご指導いただきありがとうございました。
ちなみに、安定した変数は、Kp:12.5、Kd:10.9、Kw:0.42 でした。
ご報告ありがとうございます!
倒立達成とのことで安心いたしました。
3軸の成功も楽しみしております!