2軸 姿勢制御モジュール SHISEIGYO-2 爆誕 ーリアクションホイールへの道27ー
本記事にはアフィリエイト広告が含まれます。
前回はAdafruit CLUE を用いて1軸 姿勢制御モジュール SHISEIGYO-1 を製作しました。
ここでは2軸 姿勢制御モジュール SHISEIGYO-2 を製作しましたので報告いたします。
目次
2軸 姿勢制御モジュール
2軸の姿勢制御モジュールは以下の動画をみて製作してみたいと強く思いました。
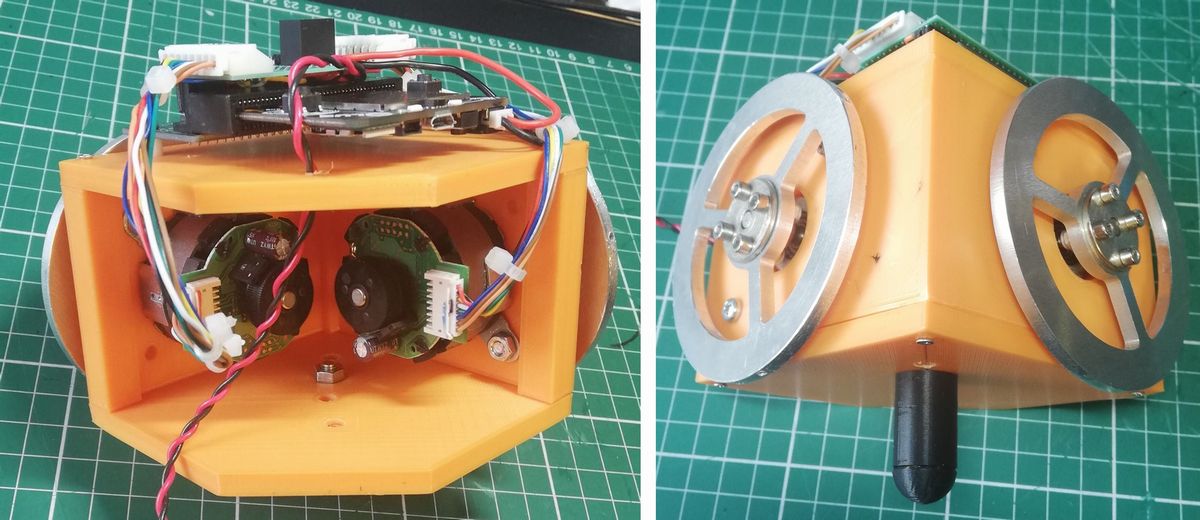
筐体製作
フライホイールを2個固定する筐体を製作しました。
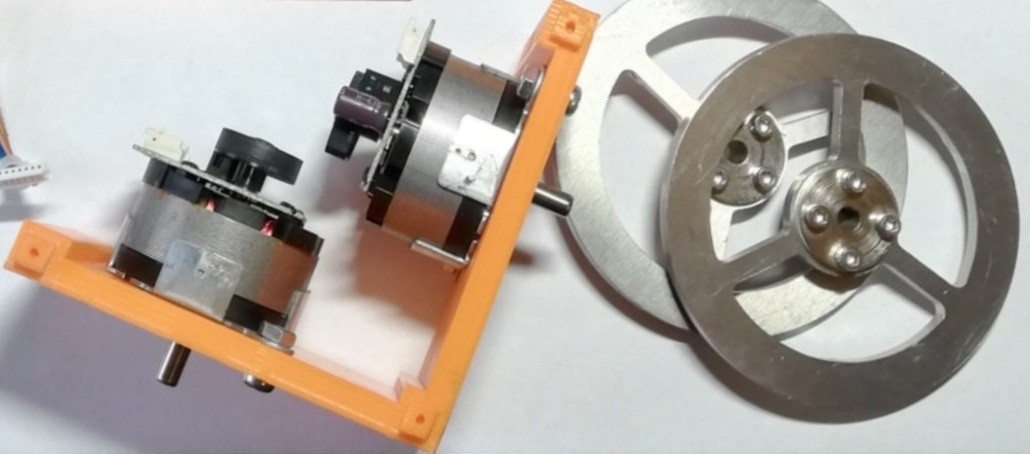
Adafruit CLUEを載せて、底面には先が球の円筒を固定しました。
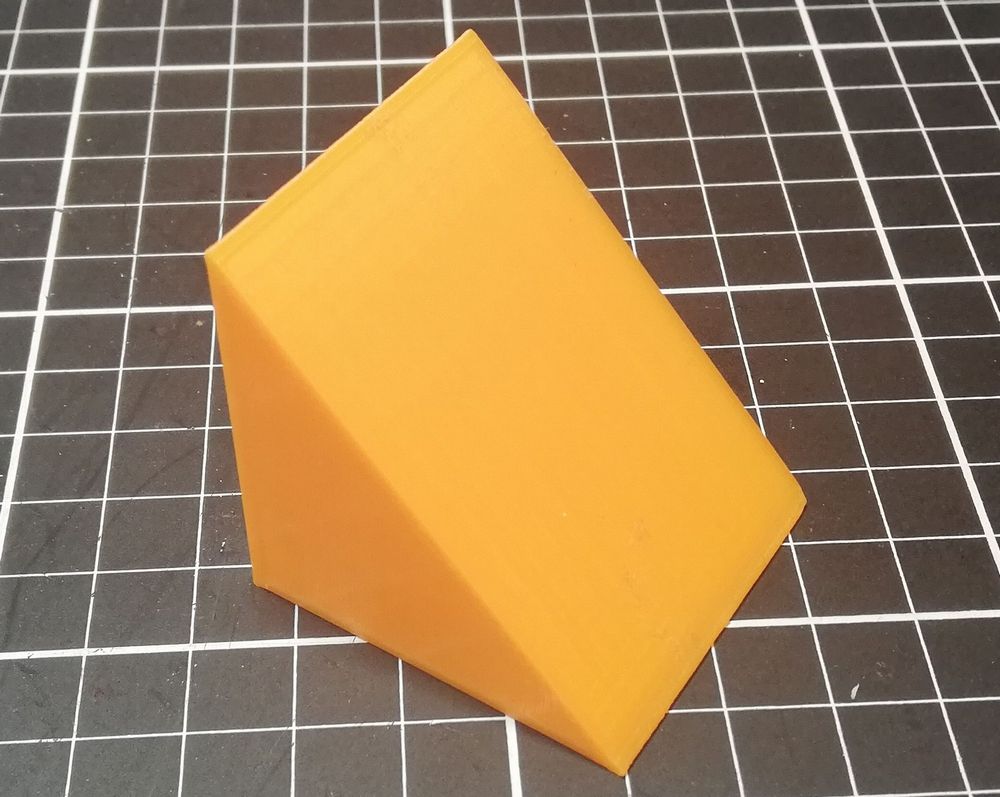
倒立調整
Adafruit CLUE搭載の6軸慣性センサ LSM6DS33 でX軸とY軸の姿勢角と角速度を算出しフィードバックかけて安定倒立を目指します。
まずは底面に三角柱を貼り付けて1軸ずつ安定倒立動作を確認いたしました。
Y軸
この投稿をInstagramで見る
X軸
この投稿をInstagramで見る
SHISEIGYO-2 動作
各軸の調整が確認できましたので2軸での倒立を実施します。
この投稿をInstagramで見る
おわりに
ここではフライホイール2個による姿勢制御モジュール SHISEIGYO-2の製作を実施しました。
筐体のアンバランス性やAdafruit CLUEのディスプレイ表示による遅延で完ぺきな安定は得られていませんがほぼほぼ完成できたのではないでしょうか。
別のマイコンでもSHISEIGYO-2を試してみたいと考えております。
それでは次の道でお会いしましょう!
次の記事

関連記事
 Adafruit CLUE で SHISEIGYO-1 やってみた ーリアクションホイールへの道26ー
Adafruit CLUE で SHISEIGYO-1 やってみた ーリアクションホイールへの道26ー
 1軸 姿勢制御モジュール がやっと立った ーリアクションホイールへの道7ー
1軸 姿勢制御モジュール がやっと立った ーリアクションホイールへの道7ー
 姿勢制御モジュール SHISEIGYO-1R 爆誕 ーリアクションホイールへの道15ー
姿勢制御モジュール SHISEIGYO-1R 爆誕 ーリアクションホイールへの道15ー
 3軸 姿勢制御モジュール SHISEIGYO-3 ESP32とMPU6050の使用 ーリアクションホイールへの道22ー
3軸 姿勢制御モジュール SHISEIGYO-3 ESP32とMPU6050の使用 ーリアクションホイールへの道22ー
 3軸 姿勢制御モジュール SHISEIGYO-3 点倒立 安定性検討 ーリアクションホイールへの道28ー
3軸 姿勢制御モジュール SHISEIGYO-3 点倒立 安定性検討 ーリアクションホイールへの道28ー
 3軸 姿勢制御モジュール SHISEIGYO-3 改良 ーリアクションホイールへの道32ー
3軸 姿勢制御モジュール SHISEIGYO-3 改良 ーリアクションホイールへの道32ー
 1軸 姿勢制御モジュール SHISEIGYO-1 バッテリ内蔵検討 ーリアクションホイールへの道33ー
1軸 姿勢制御モジュール SHISEIGYO-1 バッテリ内蔵検討 ーリアクションホイールへの道33ー
 SHISEIGYO-2 Go 球体ホイールを検討 ーリアクションホイールへの道41ー
SHISEIGYO-2 Go 球体ホイールを検討 ーリアクションホイールへの道41ー