3軸 姿勢制御モジュール SHISEIGYO-3 点倒立 安定性検討 ーリアクションホイールへの道28ー
本記事にはアフィリエイト広告が含まれます。
購入したモータの到着待ちのため、ここしばらく SHISEIGYO-3 の開発をお休みしておりました。
ここまでの開発過程は以下にまとめております。
SHISEIGYO-3 の開発を再開しましたのでご報告致します。
目次
モータ購入
SHISEIGYO-3 は以下の写真のショートバージョンのブラシレスモータID-529XW を3個搭載しております。
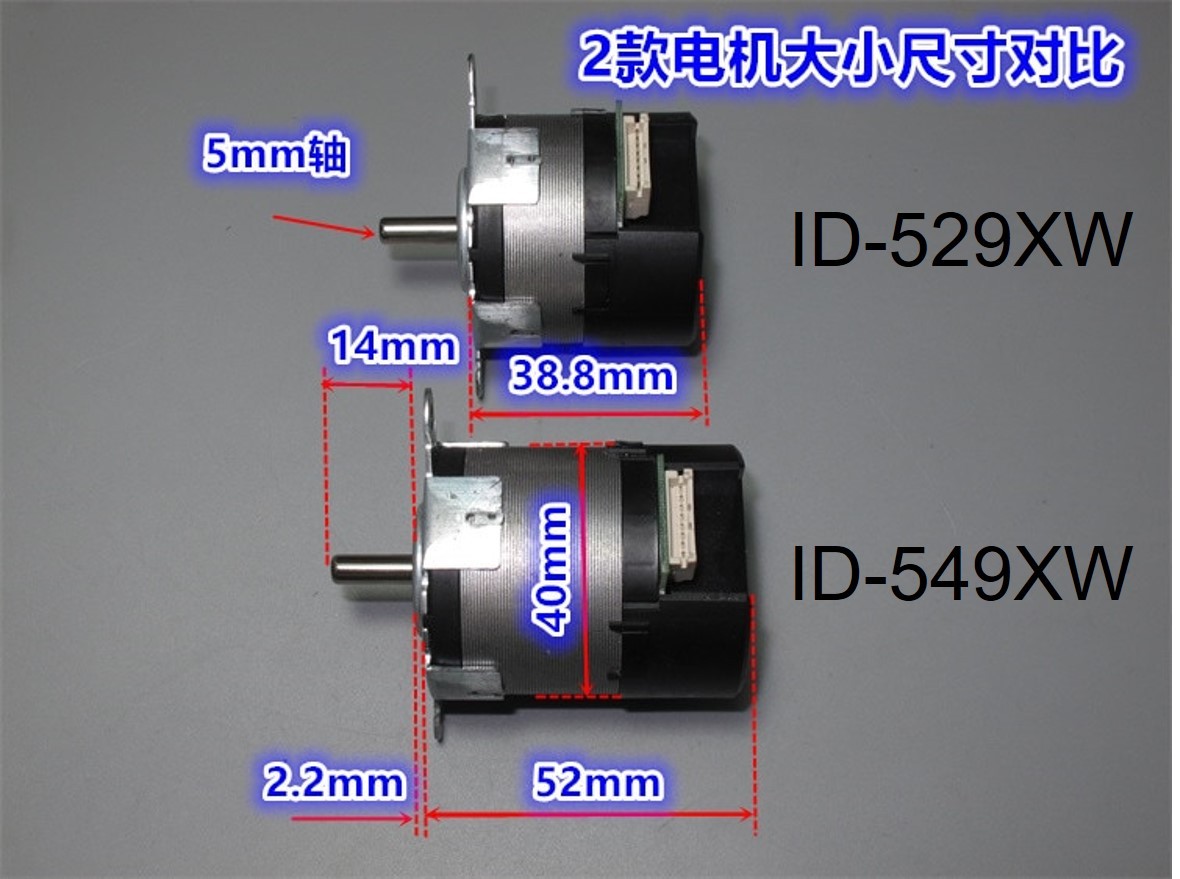
しかし ID-529XW 1個を物理ブレーキなしでの起き上がり辺倒立実験中に煙が出て壊してしまいました。
そのため仕方なくSHISEIGYO-3の真ん中のモータをロングバージョンID-549XWを搭載して実験を続けておりました。
安定点倒立を目指しておりましたが、モータの非対称性のため恒久的な倒立が実現できずにいたのでショートバージョンモータを購入し到着を待ちました。
モータ到着
なんとショートバージョンのモータをオーダーしたのにロングバージョンモータが到着しました。。。
おい ショートタイプのモータ頼んだのに
ロングきたぞ。。。 pic.twitter.com/eQHUDhfMiW— HomeMadeGarbage (@H0meMadeGarbage) December 25, 2020
11/16にAliExpressで注文して12/25に到着し1か月以上待ったのに。。。
目の前が真っ暗になりましたがクリスマスだったのでシャンペーンを飲んでグッと我慢しました。
返品も考えましたが面倒ですし、どうせまた1か月待つので止めました。
ロングバージョンモータはまた何かに使えるでしょうし。
再度ショートバージョンモータを購入し、二度と間違えないでくれとコメントを送っておきました。
モータ修理
モータのことは忘れ、家族とのクリスマスパーティーを楽しみ酔っ払ったのですが、
やはり あきらめきれず燃えたショートバージョンモータの基板を到着したロングバージョンモータとの差し替えを思い立ちました。
ショートバージョンモータの基板は思いっきり過負荷による破壊痕がありました。

取り外してロングバージョンモータの基板と差し替えて、無事動作を確認できました。
今日来たロングバージョンモータの
基板を移植して
ショートバージョンモータ復活!2連休はステイホームで
SHISEIGYO-3三昧だ!! pic.twitter.com/yjb94snFDj— HomeMadeGarbage (@H0meMadeGarbage) December 25, 2020
酔っていたこともあり、小惑星探査機 はやぶさ のイオンエンジンのメイン出力と中和剤出す所がそれぞれ壊れた2ユニットを結合して推進した時と重なり1人でうっとりしました。
点倒立動作
モータを修理して3つ全てをショートバージョンモータにして点倒立動作を確認しました。
非対称性が解消され恒久的点倒立が実現できました!!
おわりに
ついに安定点倒立が実現できました。
続いて安定した起き上がり点倒立の実現とモジュールの向きの制御の検討を実施したいと思います。
それでは次の道でお会いしましょう!
次の記事

関連記事
 3軸 姿勢制御モジュール SHISEIGYO-3 ESP32とMPU6050の使用 ーリアクションホイールへの道22ー
3軸 姿勢制御モジュール SHISEIGYO-3 ESP32とMPU6050の使用 ーリアクションホイールへの道22ー
 3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
 3軸 姿勢制御モジュール SHISEIGYO-3 改良 ーリアクションホイールへの道32ー
3軸 姿勢制御モジュール SHISEIGYO-3 改良 ーリアクションホイールへの道32ー
 SHISEIGYO-3-eternal 爆誕 ーリアクションホイールへの道35ー
SHISEIGYO-3-eternal 爆誕 ーリアクションホイールへの道35ー
 SHISEIGYO-2 を改良しました ーリアクションホイールへの道36ー
SHISEIGYO-2 を改良しました ーリアクションホイールへの道36ー
 SHISEIGYO-3 eternal 改良 ーリアクションホイールへの道38ー
SHISEIGYO-3 eternal 改良 ーリアクションホイールへの道38ー
 SHISEIGYO-2 Go 球体ホイールを検討 ーリアクションホイールへの道41ー
SHISEIGYO-2 Go 球体ホイールを検討 ーリアクションホイールへの道41ー
 バッテリ内蔵 姿勢制御モジュール SHISEIGYO-3 Unplugged ーリアクションホイールへの道42ー
バッテリ内蔵 姿勢制御モジュール SHISEIGYO-3 Unplugged ーリアクションホイールへの道42ー