SHISEIGYO-3 eternal 改良 ーリアクションホイールへの道38ー
本記事にはアフィリエイト広告が含まれます。
以前、電源を入れると点倒立するまで自律的に パラメータ調整しつつ動き続けるシステム”SHISEIGYO-3 eternal”を構築しました。
ここではSHISEIGYO-3 eternalに改良を施しましたので報告させていただきます。
目次
筐体調整
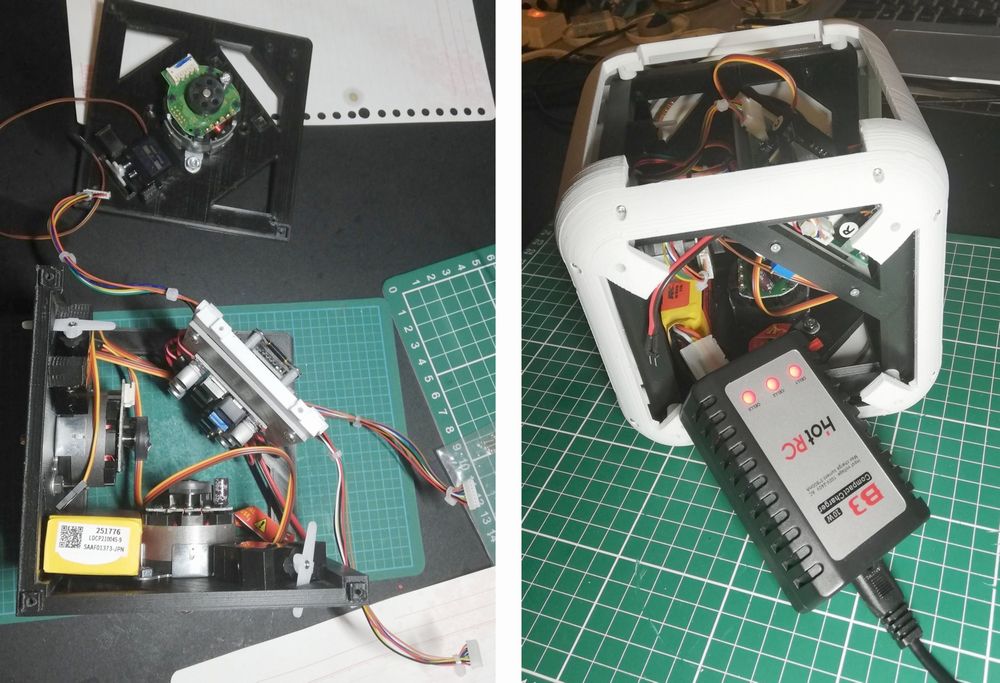
モータの負担をさらに低減するために、角のRを大きくしました。
角のR 更に丸めて 20mm -> 30mm へ
モータの負担減らしつつホイールのネジも減らしたい#リアクションホイールへの道 https://t.co/lY8F0JFVU4 pic.twitter.com/0JKG6fdXWU— HomeMadeGarbage (@H0meMadeGarbage) May 29, 2021
倒立調整
新筐体で倒立の調整を行いました。
#リアクションホイールへの道 pic.twitter.com/M5lAs54olC
— HomeMadeGarbage (@H0meMadeGarbage) May 30, 2021
角を丸めた効果でモータの負担が減り、点倒立成功確度も非常に高くなりました。
また、この動作をTweetしたところ
“マツモト”、”マツモトだ”と少し騒がれましたww
なんのことだろうと思ったのですが、アニメのキューブロボットのことだったようで思いっきり のっかってみました。
似ていますでしょうか? 😀
マツモトクラフトを利用させていただきました。#vivy#ヴィヴィ https://t.co/FJkj3Qxjm5 pic.twitter.com/kMsbobO74G
— HomeMadeGarbage (@H0meMadeGarbage) June 6, 2021
eternal動作
前回同様に電源起動で自律的にモータ回転速度などを調整しながら点倒立動作し続けるようにしました。
おわりに
だいぶ点倒立の確度も向上しましたので現状でも見れいられるシステムになったかと思います。
電源線の巻き込みなどケア考えたいです。
どっかで展示してみたいなぁ 🙄
次の記事

関連記事
 3軸 姿勢制御モジュール SHISEIGYO-3 基板製作 ーリアクションホイールへの道34ー
3軸 姿勢制御モジュール SHISEIGYO-3 基板製作 ーリアクションホイールへの道34ー
 SHISEIGYO-3-eternal 爆誕 ーリアクションホイールへの道35ー
SHISEIGYO-3-eternal 爆誕 ーリアクションホイールへの道35ー
 バッテリ内蔵 姿勢制御モジュール SHISEIGYO-3 Unplugged ーリアクションホイールへの道42ー
バッテリ内蔵 姿勢制御モジュール SHISEIGYO-3 Unplugged ーリアクションホイールへの道42ー
 3軸 姿勢制御モジュール SHISEIGYO-3 ESP32とMPU6050の使用 ーリアクションホイールへの道22ー
3軸 姿勢制御モジュール SHISEIGYO-3 ESP32とMPU6050の使用 ーリアクションホイールへの道22ー
 3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
 3軸 姿勢制御モジュール SHISEIGYO-3 点倒立 安定性検討 ーリアクションホイールへの道28ー
3軸 姿勢制御モジュール SHISEIGYO-3 点倒立 安定性検討 ーリアクションホイールへの道28ー
 3軸 姿勢制御モジュール SHISEIGYO-3 改良 ーリアクションホイールへの道32ー
3軸 姿勢制御モジュール SHISEIGYO-3 改良 ーリアクションホイールへの道32ー
 SHISEIGYO-2 Go 球体ホイールを検討 ーリアクションホイールへの道41ー
SHISEIGYO-2 Go 球体ホイールを検討 ーリアクションホイールへの道41ー
HomeMadeGarbage 様
SHISEIGYO-3ni にチャレンジしています。
辺倒立まではクリアしたのですが、点倒立で行き詰っていて一か月ほど経っています。
レシピとの違いは、ホイールが、銅箔の貼り付けに自信がなく、アルミ板の切断品に変えています。
ホイールの重量は、60.29gとなっています。
現在のパラメーター値は、
KpLR = 11.5; KdLR = 7.4; KwLR = 1.3、KpC = 12.0; KdC = 19.2; KwC = 1.4、KC = 6.0; KC2 = 10.2; KLR = 12.0
となっています。
ホイールの重量の差を補正する必要がありますでしょうか、ご教示の程お願い致します。
ホイールがアルミ製とのことで初期のSHISEIGYO-3に近い状況かと思います。
以下の初期型SHISEIGYO-3の定数から追いかけてみてはいかがでしょうか。
KpLR = 12.0; KdLR = 22.0; KwLR = 1.4、KpC = 12.0; KdC = 22.0; KwC = 1.4、KC = 9.0; KC2 = 11.0; KLR = 9.0
ホイールの重量で定数に差がかなり出るはずので明確に回答ができず申し訳ございませんが
ご検討のほどよろしくお願いいたします。
HomeMadeGarbage 様
SHISEIGYO-3cube のレシピが販売されたのを機に、SHISEIGYO-3niを諦めcubeにチャレンジしています。
途中、3D プリンターの不調もあり、本体の組み立てができなかったのですが、ようやく完成し、チャレンジを再開しています。
点倒立のパラメーター値がなかなか定まらず(まだ二日目ですが)苦慮しています。
KpLR = 11.4; KdLR = 7.5; KwLR = 1.4; KpC = 12.0; KdC = 21.0; KwC = 1.4; KC = 8.0; KC2 = 0.02; KLR = 8.0;
ほかのパラメーターで調整できる要素はありませんでしょうか、アドバイスのほどお願い致します。
コメントありがとうございます。
パラメータ調整に関しましては根気強く一つずつ変えて動作の様子を感じ取っていただくしかないのですが
KC2が極端に小さいように感じます。
KC2は点倒立時に機体の回転を抑えるためのパラメータですので
こちらの調整が必要かと思われます。
HomeMadeGarbage 様
現在,SHISEIGYO-3cubeの製作キットを購入させていただき,作製を行っています.
筐体は完成し,現在辺倒立を行っているのですが,辺倒立させた際にモータが高速回転し,モータの傾きが0に収束せず,発散してしまいます.
原因としてどのようなことが考えられますでしょうか.
ご教授いただけますと幸いです.
お問い合わせいただきありがとうございます。
考えられる点としまして以下を確認させていただきたく宜しくお願い致します。
・MPU6050のオフセット調整は実施済みでしょうか?
・手でやさしく起きあげての辺倒立もできない状況でしょうか?
・3辺全てて手で持ち上げての辺倒立ができない状況でしょうか?
以上ご確認のほど何卒宜しくお願い致します。
起き上げ方を工夫しましたら辺倒立いたしました.
お騒がせして申し訳ありません,ありがとうございました.
無事に辺倒立できたとのこと安心いたしました。
引き続きよろしくお願いいたします。