3軸 姿勢制御モジュール SHISEIGYO-3 の開発過程と今後の予定
本記事にはアフィリエイト広告が含まれます。
HomeMadeGarbage Advent Calendar 2020 |23日目
Arduino Advent Calendar 2020|23日目
今夏より姿勢制御モジュールの開発に凝っており、以下のように
あと50日で点倒立するSHISEIGYO-3
M5Stack Advent Calendar 23日目に参加しました #Qiita https://t.co/9b5CMxhwbh
— HomeMadeGarbage (@H0meMadeGarbage) November 3, 2020
今から50日前に3軸姿勢制御モジュールの完成を想定していたのですが、開発にはつきもののイレギュラーなことが起こり
現在完成には至っておりません。
ここでは言い訳としまして3軸姿勢制御モジュール SHISEIGYO-3の開発過程と今後の課題をまとめさせていただきます。
目次
SHISEIGYO-1
SHISEIGYO-3の前に開発したSHISEIGYO-1を簡単に紹介させていただきます。
1軸の姿勢制御モジュール SHISEIGYO-1はリアクションホイールを1個搭載して辺倒立します。
また物理ブレーキなしでの起き上がり倒立も実現しました。
バズったら宣伝してもいいとおばあちゃんが言っていたという投稿を何度か見たことがございます。
1軸の姿勢制御モジュール SHISEIGYO-1の制作レシピを以下で販売中です。https://t.co/6NiNw2xewg
筐体3Dモデルとサンプルコードは上記ページで無料DLできます。
データだけでもDLしてみてください♪ pic.twitter.com/2S7j4FFtX3— HomeMadeGarbage (@H0meMadeGarbage) November 10, 2020
SHISEIGYO-2
SHISEIGYO-3と並行して2軸の姿勢制御モジュール SHISEIGYO-2も製作いたしました。
【ブログ更新】
SHISEIGYO-2 爆誕#Adafruit #姿勢制御モジュール#リアクションホイールへの道☟詳細はコチラhttps://t.co/uF3mgEdiJw pic.twitter.com/h97i4Jmi52
— HomeMadeGarbage (@H0meMadeGarbage) December 20, 2020
SHISEIGYO-3 開発過程
ここにSHISEIGYO-3の開発過程を記します。
点倒立検討
まずはX軸とY軸の2軸の制御で点倒立は実現できると考え、M5Stack Core2を用いて
Y軸を真ん中のリアクションホイール、X軸をサイドのリアクションホイール2個で制御してみましたがうまくいきませんでした。
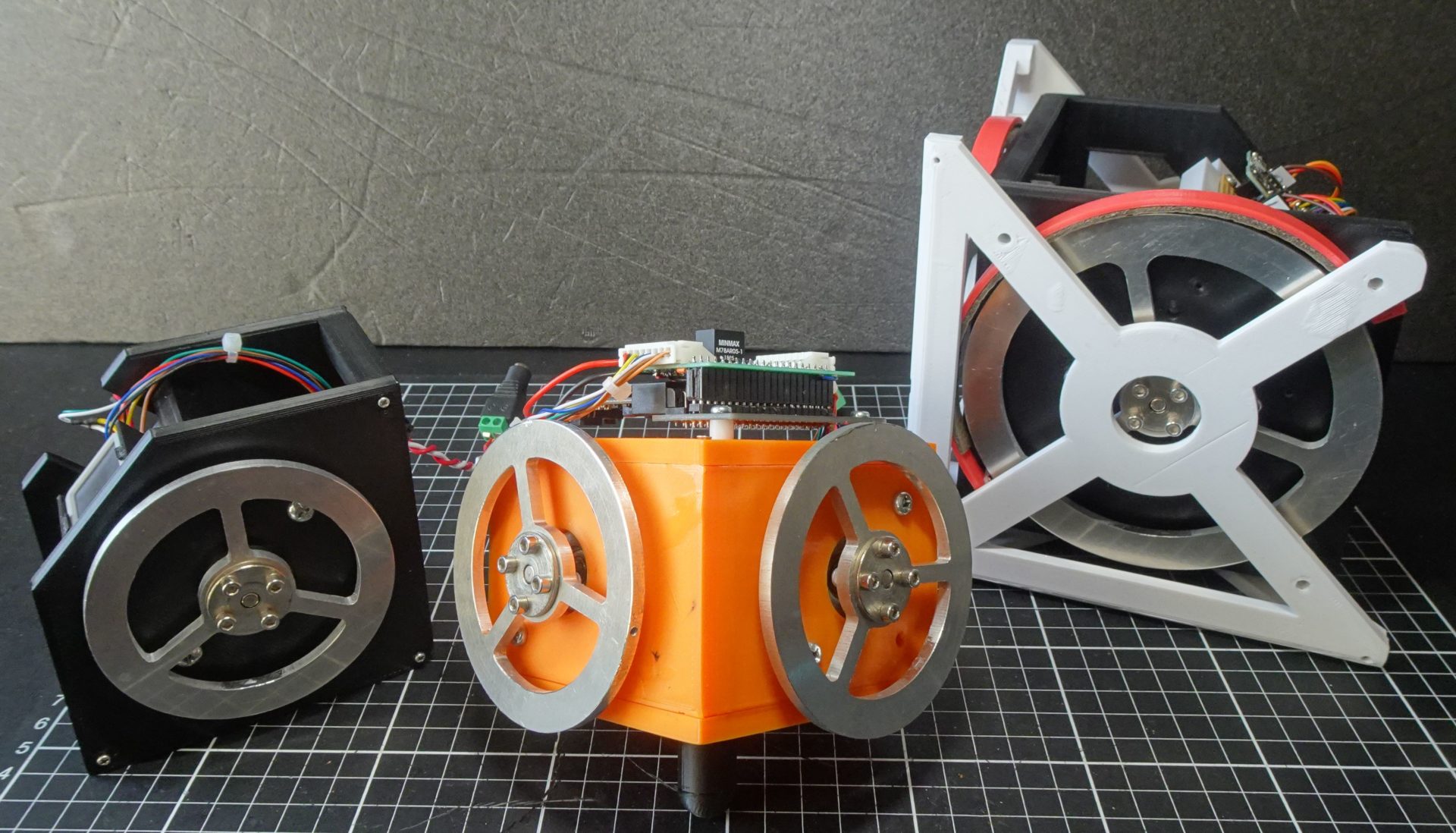
そこで3つのリアクションホイールを独立に制御しての点倒立を目指しました。
3つのモータを独立に制御するにはM5Stack Core2ではピンが足りなかったので、
真ん中のモータをM5Stack Core2で制御して、サイドのモータ2個をそれぞれATOM Matrix で制御しました。
更にフライホイ―ルのサイズを直径8cmのものから12cmに変更してトルクを向上させました。
こんなこともあろうかと大きめのフライホイールも買っておいたのです。
D-120mm Hole-5mmhttps://t.co/N9EJd6xG5v
10/14購入
10/31着#SHISEIGYO3#姿勢制御モジュール#リアクションホイールへの道 pic.twitter.com/ThNodSPxSF— HomeMadeGarbage (@H0meMadeGarbage) November 9, 2020
恒久的ではないですが、3軸でのモータ制御で点倒立動作の確認をすることができました。
【ブログ更新】
3軸姿勢制御モジュール SHISEIGYO-3
ついに点倒立の実現!#リアクションホイールへの道#M5stack #姿勢制御モジュールしかし更なる課題と欲が私を襲う
☟詳細はコチラhttps://t.co/1CksRqOvG1 pic.twitter.com/c8XrlHP6D6
— HomeMadeGarbage (@H0meMadeGarbage) November 9, 2020
ちなみに筐体は3Dプリンタで作製しました。
マイコン削減
M5Stack Core2 とATOM Matrix 2個で点倒立動作を確認できましたが、もったいないのでM5Stack Core2のみでのモジュール制御を検討しました。
必然的にIMUセンサも1つになるので、座標変換して両サイドのモータ軸に対する角度や角速度を算出し倒立動作確認いたしました。
SHISEIGYO-3 IMU 3個から1個に軽減
左右のモータは座標変換で傾き、角速度算出して
制御#リアクションホイールへの道☟詳細はコチラhttps://t.co/eWI4J1hRFH pic.twitter.com/vl9PsLSS9a
— HomeMadeGarbage (@H0meMadeGarbage) November 17, 2020
M5Stack Core2単体でモータ3個制御するにはピンが足りなかったため、ロジック制御ピンとして M5Stack用 I/O拡張ユニットを使用して対応しました。

しかし不幸なことに、ここでの作業の際に過電圧印可によりM5Stack Core2を壊してしまいました。。。
起き上がり辺倒立検討
マイコンを破壊してしまったので、ひとまず点倒立動作は置いておいて起き上がり動作の検討を実施いたしました。
SHISEIGYO-1は物理ブレーキなしにリアクションホイールの回転制御のみで起き上がり動作を実現しています。
SHISEIGYO-3でも物理ブレーキなしでの起き上がりを検討したところ。。。
モータから煙が出て壊れてしまいました。
要因としましてはフライホイールのサイズを大きくしたことと、モータ3個の実装を実現するためにSHISEIGYO-1よりもサイズの小さいものを使用しており負荷が大きくかかったためだと思います。
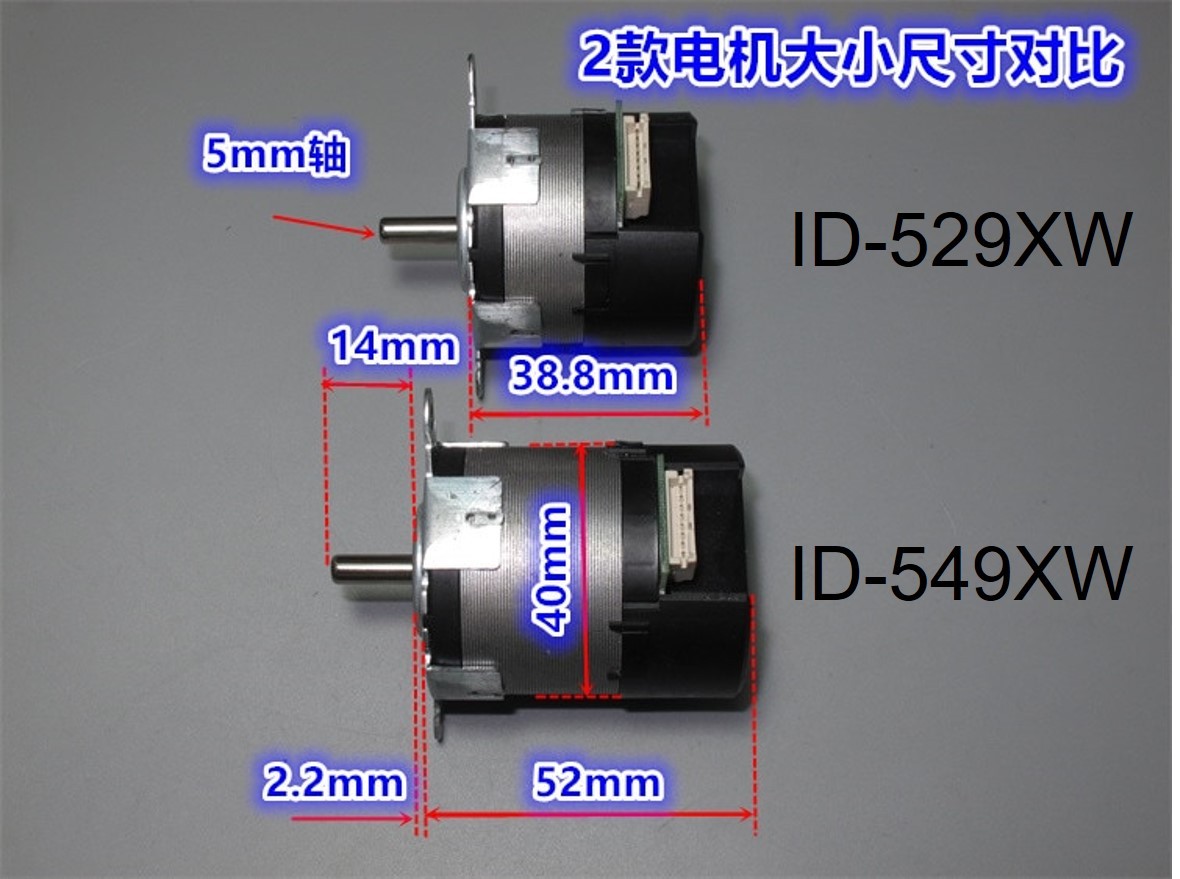
SHISEIGYO-1ではロングバージョンのブラシレスモータID-549XWを使用し、
SHISEIGYO-3ではショートバージョンのブラシレスモータID-529XWを3個使用していました。
起き上がりのために高速で回転し反転を繰り返して破壊しました。。。
物理ブレーキ検討
物理ブレーキなしでの起き上がりは断念して物理ブレーキの検討を開始しました。
TPUフィラメントを用いてバンドブレーキを製作し、サーボでブレーキを動かしての起き上がり辺倒立動作を実現することができました。
TPU Brake System for SHISEIGYO-3#3Dprinting #motor pic.twitter.com/DVyjStqAvj
— HomeMadeGarbage (@H0meMadeGarbage) November 19, 2020
ここでは、筐体の倒立辺の角を丸めたり筐体を肉抜きして軽量化するなどの努力もしております。
ESP32採用
マイコンにESP32の開発ボードを採用しました。
潤沢にピンがあるので拡張ユニットなしに3個のモータを制御できました。
IMUセンサとしてMPU6050を使用しディスプレイも付けました。
ディスプレイ付けた。
やっぱ便利#ESP32 #リアクションホイールへの道EasyWordMall iic i2c OLEDモジュールを Amazon でチェック! https://t.co/lgDGiN7NZl pic.twitter.com/QQ5FHMHgfy
— HomeMadeGarbage (@H0meMadeGarbage) November 29, 2020
倒立角 動的再調整システム確立
安定的な点倒立を実現するためにモータの回転数をフィードバックして倒立のための目標姿勢角度を動的に調整するシステム(IDRS:Inverted angle Dynamic Readjustment System )を確立しました。
【ブログ更新】
3軸 姿勢制御モジュール SHISEIGYO-3の安定点倒立メソッドを検討いたしました動的に倒立角を再調整するシステム(IDRS)を確立し
安定した点倒立の可能性を確認することができました。#ESP32 #リアクションホイールへの道#ブログ #ブロガー☟詳細はコチラhttps://t.co/LHXohoK0H5 pic.twitter.com/toUMMCdlOI
— HomeMadeGarbage (@H0meMadeGarbage) November 29, 2020
まだまだ恒久的とは言えませんが、IDRSによって長時間の点倒立が実現できています。
ショートバージョンモータを一個 燃やしてしまったため、両サイドのモータをショートモータID-529XW、
真ん中をロングモータID-549XWを使用しております。
この非対称性が恒久的点倒立を難しくしていると考えております。
以下はIDRSの効能を示す動画です。
起き上がり点倒立実現
バンドブレーキを両サイドのホイールにも搭載し起き上がり点倒立を検討しました。
サイドブレーキ付けた
さてどうなる。#リアクションホイールへの道#姿勢制御モジュール pic.twitter.com/BDXChvc2NP
— HomeMadeGarbage (@H0meMadeGarbage) December 1, 2020
バンドブレーキに皮を張るなどの改良も加えて、点倒立動作を実現することができました。
3軸 姿勢制御モジュール SHISEIGYO-3
バンドブレーキ改良 #リアクションホイールへの道#ESP32☟詳細はコチラhttps://t.co/MdLPlm2V0g pic.twitter.com/6ikYH7OT8j
— HomeMadeGarbage (@H0meMadeGarbage) December 14, 2020
SHISEIGYO-3 今後の課題
今後の課題としまして、破壊してしまったショートバージョンブラシレスモータID-529XWを入手しID-529XW3個での安定点倒立の実現が挙げられます。
AliExpressで購入済ですが配送に時間がかかるので、入手次第取り掛かりたいと思います。

おわりに
なんとか起き上がり点倒立動作の実現には至りましたがまだまだ完成とは言えない状況です。
これからもSHISEIGYO-3の開発に向けて昇進いたします。
さいごに開発年表を記します。
SHISEIGYO-3 開発年表
2020/10/15 SHISEIGYO-3の開発開始
2020/10/22 2軸制御での点倒立 断念
2020/11/09 3軸制御での点倒立動作 確認
2020/11/16 IMUセンサ 1個での点倒立動作確認
M5Stack CORE2 破壊
2020/11/17 起き上がり動作検証時にブラシレスモータ破壊
2020/11/18 物理ブレーキによる起き上がり辺倒立動作実現
2020/11/24 マイコンにESP32開発ボードを採用
2020/11/29 倒立角 動的再調整システム確立
2020/12/03 起き上がり点倒立 実現