1軸 姿勢制御モジュール SHISEIGYO-1 バッテリ内蔵検討 ーリアクションホイールへの道33ー
本記事にはアフィリエイト広告が含まれます。
以前製作した 1軸 姿勢制御モジュール SHISEIGYO-1 につきましてバッテリ内蔵化を検討しましたのでご報告します。
目次
バッテリ内蔵
従来型
これまでSHISEIGYO-1は24V ACアダプタでモータ電源を駆動し、5Vに降圧してマイコンに給電していました。
SHISEIGYO-1は起き上がり動作時に瞬間的に1A以上消費します。

バッテリ内蔵検討
先日、朱雀技研ショップのTweetで良い製品をみつけ バッテリ内蔵の検討をしてみようと思い立ちました。
2.9~32Vの幅広い入力電圧を24Vに変換する強力なスイッチング昇降圧型定電圧レギュレータです。
最大出力電流は2Aです。
様々な電源で駆動する装置にオススメです。
Pololu 24V 2A 昇降圧型定電圧レギュレータ S18V20F24https://t.co/qurod5YpyH pic.twitter.com/AeAYCNIbKK— 朱雀技研ショップ情報 (@suzakulabshop) February 4, 2021
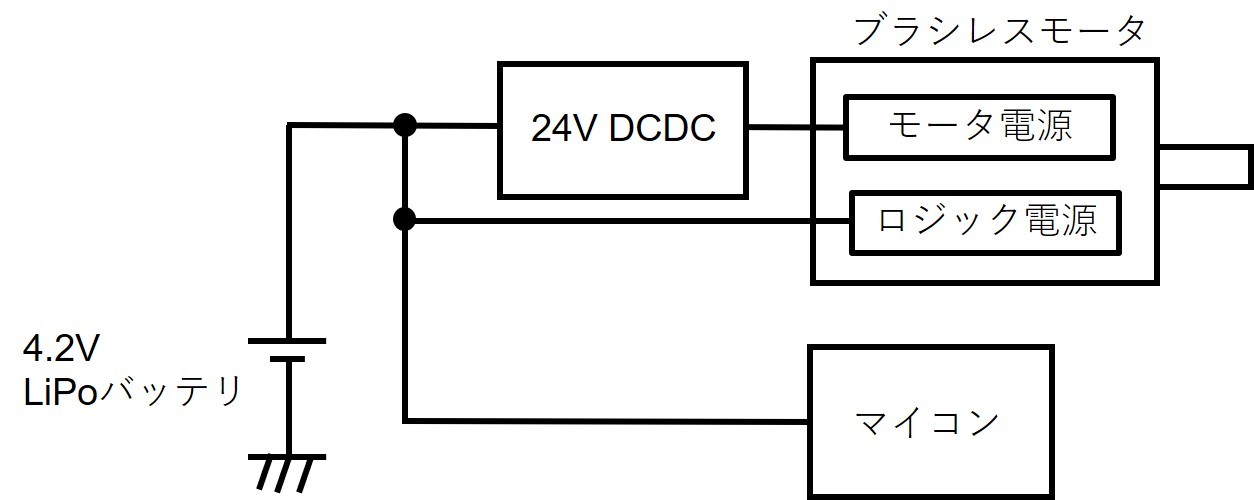
並行して勉強しているドローン用に買ったLiPoバッテリを1次側にして、24Vに昇圧してモータに給電する構成にしてみました。
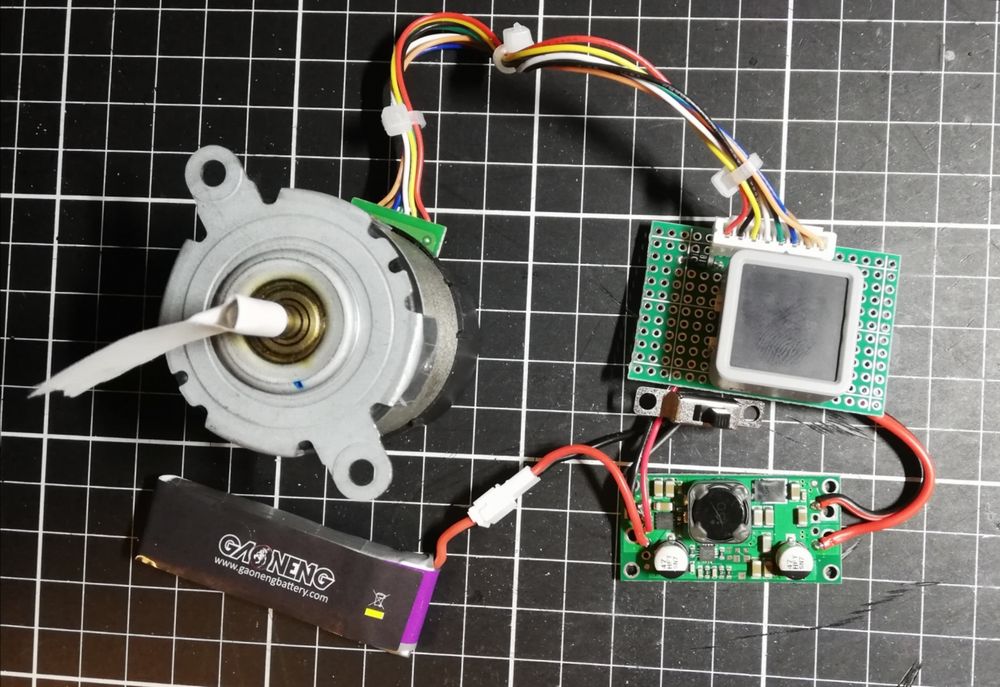
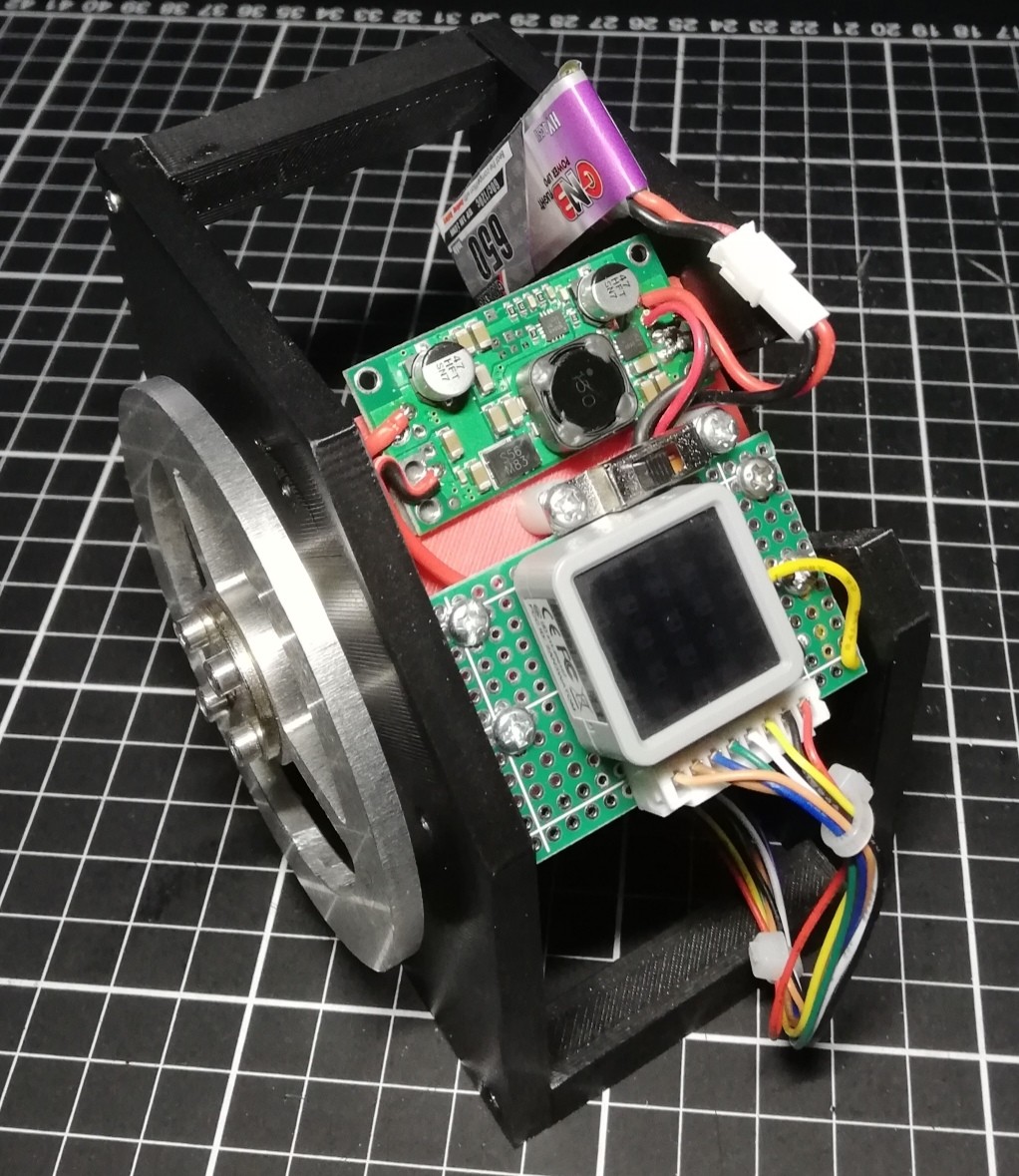
組み立て
ユニバーサル基板を使用しつつ組み立てました。
動作
倒立自体ではそれほど大きな電流消費はないので問題なく倒立が実現できました。
しかし起き上がり動作時はビクともしませんでした。。。
この投稿をInstagramで見る
考察
起き上がりの様子を見ると跳ね起きる前の回転スピードも上がり切ってないようなので
電流が十分に出力出来てないと考えられます。
1次側
起き上がり時にはモータに24V 1A以上の供給が必要です。
使用した1次側のLiPoバッテリの性能は以下の通り

4.35V、容量650mA、電流能力 39A (60C)で瞬間放電能力は78A (120C)とかなり強力です。
昇圧して24V 1A流すために1次側が流すべき電流は効率80%として
$$24 × 1 ÷ 0.8 ÷ 4.35 = 6.9 A$$
なのでLiPoバッテリの性能には問題はないはずです。
24V 昇降圧DCDCレギュレータ
そこで 昇降圧DCDCレギュレータの仕様をしっかり見てみることにしましょう。
販売サイトにちゃんと入力電圧-出力電流の図が載ってましたね。。。
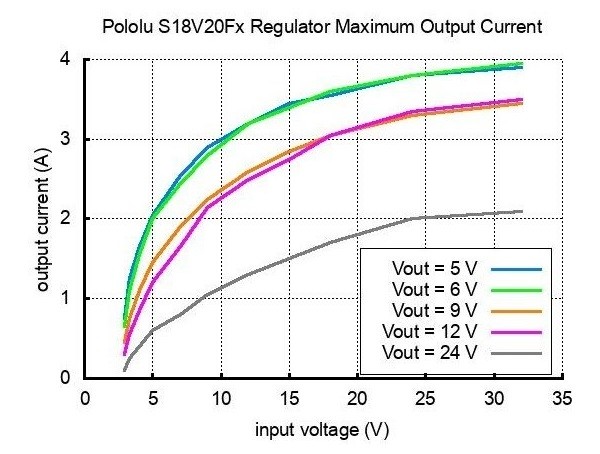
出力電圧 24Vで入力が4.35Vだと最大出力電流は0.5A程度でしたね。。。
逆に出力電流1Aを満たすには入力8V以上必要でした 🙄
ちゃんと仕様を見とくべきでした。
おわりに
比較的ハイボルで元気そうなDCDCだ!と喜びほぼ仕様見ずに買った結果
バッテリ内蔵での起き上がり動作の実現はできませんでした。
しかし購入した昇降圧DCDCはまた何かに使えそうですし、2セルのLiPoバッテリ買ったろかなと思う自分もいます。
あと電源なしにSHISEIGYO-1の倒立動作を気軽にみせれる状態になったので
コロナが収束したらポケットに入れて見せびらかしに出かけようと思います。
次の記事

関連記事
 SHISEIGYO-1 を改良 APモードでパラメータ調整 ーリアクションホイールへの道37ー
SHISEIGYO-1 を改良 APモードでパラメータ調整 ーリアクションホイールへの道37ー
 3軸 姿勢制御モジュール SHISEIGYO-3 ESP32とMPU6050の使用 ーリアクションホイールへの道22ー
3軸 姿勢制御モジュール SHISEIGYO-3 ESP32とMPU6050の使用 ーリアクションホイールへの道22ー
 3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
 3軸 姿勢制御モジュール SHISEIGYO-3 点倒立 安定性検討 ーリアクションホイールへの道28ー
3軸 姿勢制御モジュール SHISEIGYO-3 点倒立 安定性検討 ーリアクションホイールへの道28ー
 3軸 姿勢制御モジュール SHISEIGYO-3 改良 ーリアクションホイールへの道32ー
3軸 姿勢制御モジュール SHISEIGYO-3 改良 ーリアクションホイールへの道32ー
 SHISEIGYO-2 を改良しました ーリアクションホイールへの道36ー
SHISEIGYO-2 を改良しました ーリアクションホイールへの道36ー
 SHISEIGYO-3 eternal 改良 ーリアクションホイールへの道38ー
SHISEIGYO-3 eternal 改良 ーリアクションホイールへの道38ー
 SHISEIGYO-2 Go 球体ホイールを検討 ーリアクションホイールへの道41ー
SHISEIGYO-2 Go 球体ホイールを検討 ーリアクションホイールへの道41ー