SHISEIGYO-2 Go ホイール検討 球状歯車を味見 ーリアクションホイールへの道40ー
本記事にはアフィリエイト広告が含まれます。
前回 2軸 姿勢制御モジュール SHISEIGYO-2にギアのホイールを追加して移動できるようにしました。
SHISEIGYO-2 Go の爆誕でした。
今回はホイールの検討を進めましたので報告させていただきます。
目次
ABENICS
先日 Twitterでとんでもない動画を観ました。
模倣
気づいたらFusion360を開いて球状歯車を作っていました。
出力していじくりてぇ。。#Fusion360 #3dprinting pic.twitter.com/3TY5ECeHzT
— HomeMadeGarbage (@H0meMadeGarbage) June 19, 2021
動画を参考にギアを360°回して球体を作り、直交するものとANDをとれば完成です。

いじくってみると更に面白さと凄さを感じることができました。
体験って重要ですね。
おもしろい#Fusion360 #3dprinting #球体歯車 pic.twitter.com/Wr6snjLGeA
— HomeMadeGarbage (@H0meMadeGarbage) June 19, 2021
SHISEIGYO-2 Goへの応用
早速、こしらえた球状歯車をSHISEIGYO-2 Goで試してみました。
前後でしか回せてないのと
固定方法難しいのでアレだけど
可能性はポテンショ高まった。#ABENICS #球状歯車#リアクションホイールへの道 pic.twitter.com/4yfdhqO0cC— HomeMadeGarbage (@H0meMadeGarbage) June 21, 2021
以下のように360°回転サーボに普通のギアを付けて球状歯車を回している(左のサーボは重量バランスのためのダミー)のですが、たまにギアがロックしてしまい振動が大きくあまりスムーズに動けませんでした。
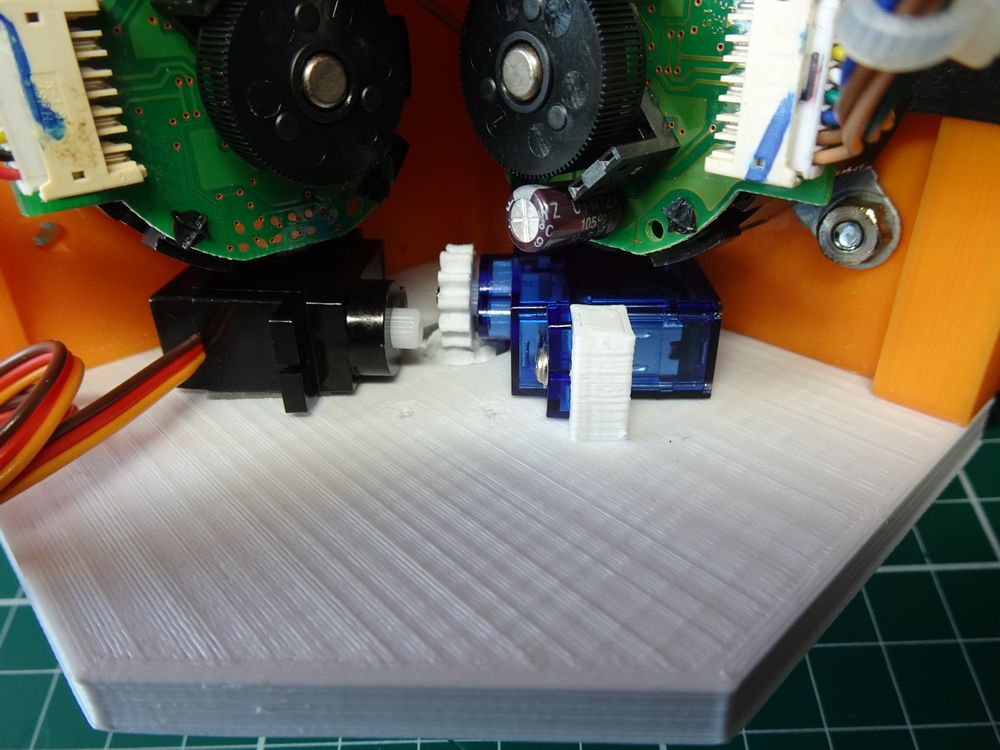
球状歯車をL字の固定具で四方から挟むように固定していたのですが
安定性向上のためにTPUフィラメントでホルダーをこしらえました。
しかし、大きな改善はありませんでした。。。
やはり回す方のギアも専用の複雑な形状に加工が必要そうです。
あまり変わらんやった#ABENICS #球状歯車#リアクションホイールへの道 pic.twitter.com/3aqUiUGbHj
— HomeMadeGarbage (@H0meMadeGarbage) June 21, 2021
SHISEIGYO-2 Go 爆走
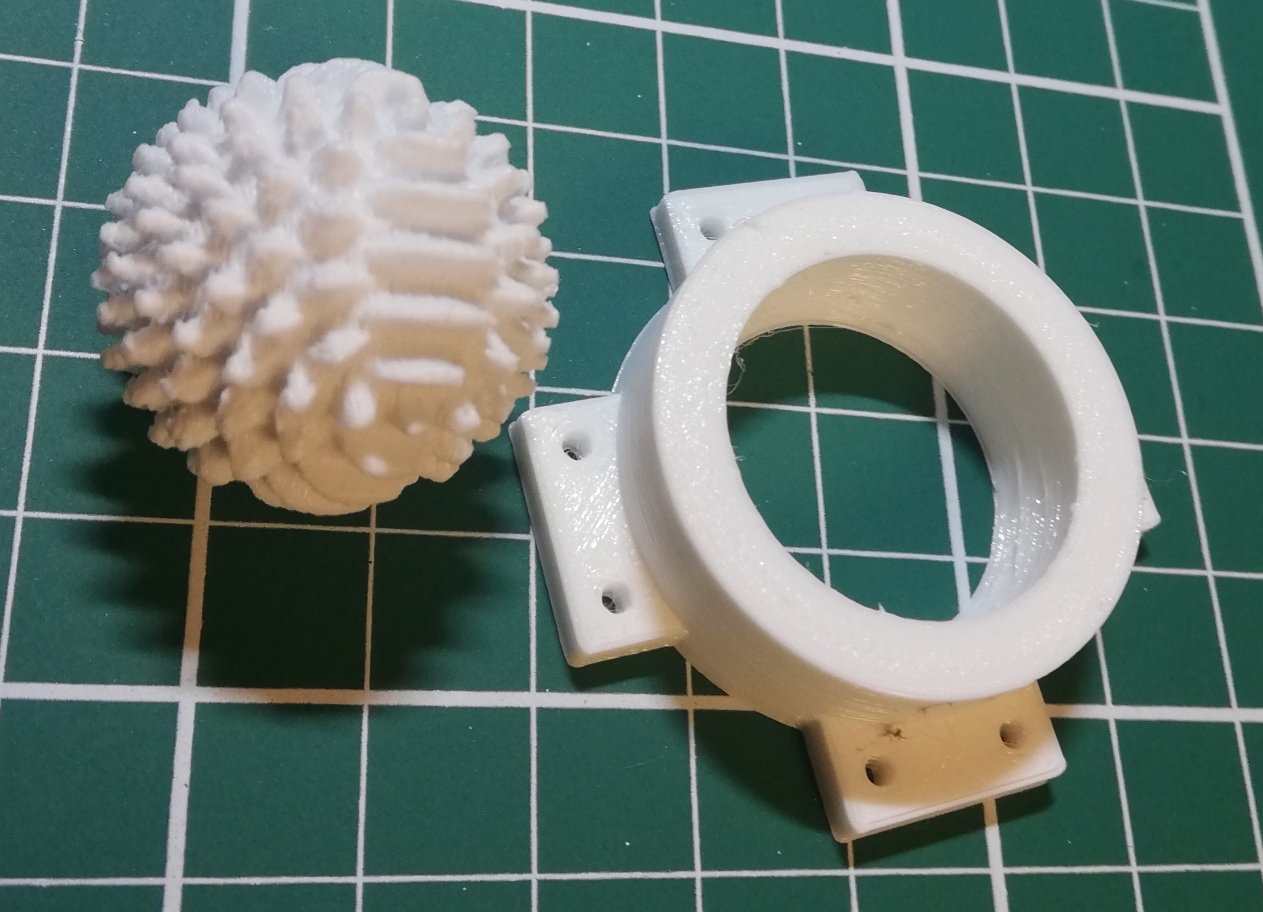
専用の回しギアのモデリングはあまりにも難しそうなので断念し、
ギア1個を回転させた以下の写真右の球状歯車を試してみました。

したら、いい感じにホールドもできてロックせずにスムーズにまわり
SHISEIGYO-2 Go 爆走したよね。
このタイプの球状歯車にしたら爆走できた!
これでこそSHISEIGYO-2 Goよ!
なんでもやってみるもんだな。#リアクションホイールへの道 pic.twitter.com/8E1p43vacp— HomeMadeGarbage (@H0meMadeGarbage) June 21, 2021
このスピードで動けたら申し分なくSHISEIGYO-2 Go ですね!!
この投稿をInstagramで見る
おわりに
球状歯車をためして思いがけない進展を得ることができました。
しかし、せっかく球状のホイールを採用するのであれば前後移動だけでは寂しいですね。
もっと縦横無尽に動かしたいです。
別に歯車状である必要もない気がしてきているので検討進めたいと思います。
それでは次の道でお会いしましょう!
次の記事

関連記事
 SHISEIGYO-2 Go 球体ホイールを検討 ーリアクションホイールへの道41ー
SHISEIGYO-2 Go 球体ホイールを検討 ーリアクションホイールへの道41ー
 一脚 屈伸ロボ 爆誕
一脚 屈伸ロボ 爆誕
 2軸 姿勢制御モジュール SHISEIGYO-CORE2 爆誕 ーリアクションホイールへの道30ー
2軸 姿勢制御モジュール SHISEIGYO-CORE2 爆誕 ーリアクションホイールへの道30ー
 2軸 姿勢制御モジュール SHISEIGYO-CORE2 完成 ーリアクションホイールへの道31ー
2軸 姿勢制御モジュール SHISEIGYO-CORE2 完成 ーリアクションホイールへの道31ー
 SHISEIGYO-2 を改良しました ーリアクションホイールへの道36ー
SHISEIGYO-2 を改良しました ーリアクションホイールへの道36ー
 SHISEIGYO-2 Go 爆誕 ーリアクションホイールへの道39ー
SHISEIGYO-2 Go 爆誕 ーリアクションホイールへの道39ー
 特殊球体ホイール バランスロボット SHISEIGYO-2 Go 弐
特殊球体ホイール バランスロボット SHISEIGYO-2 Go 弐
 3軸 姿勢制御モジュール SHISEIGYO-3 ESP32とMPU6050の使用 ーリアクションホイールへの道22ー
3軸 姿勢制御モジュール SHISEIGYO-3 ESP32とMPU6050の使用 ーリアクションホイールへの道22ー