SHISEIGYO-1 Walker 参 を実現させたい俺5 ー歩行検討3ー
本記事にはアフィリエイト広告が含まれます。
だいぶ期間があいてしまいましたが、シリアルサーボLX-244で足を構築しリアクションホイールでバランスをとる二足歩行ロボット”SHISEIGYO-1 Walker 参” の歩行検討を実施いたしました。
前回は歩行動作の自動化を目指し歩行動作をプログラミングしましたが上手くいかず、サーボのギアに若干遊びがあるためではないかと結論付けました。
目次
前回のおさらい
前回は歩行の自動化を試みましたが、機体の振動が大きく実現できませんでした。
どうしてもギアの遊びでブルブルするポイントが出ちゃうんよなぁ pic.twitter.com/q0CWbeQiPV
— HomeMadeGarbage (@H0meMadeGarbage) July 9, 2022
シリアルサーボLX-244には若干ギアの遊びがあり、これが振動の原因でないかと考えました。
低価格なのに高トルクで指定角度への移動精度も高く
行けると思ったんだけど
若干ギアに遊びがあってリアクションホイールでのバランス保持が難しい。。 pic.twitter.com/EVF5RRFsWT— HomeMadeGarbage (@H0meMadeGarbage) July 8, 2022
ギアの遊び低減検討
前回の段階でバネでギアの遊びの低減する方法のアドバイスをいただいておりましたので 試してみました。
A spring to keep torque on the connection? pic.twitter.com/aPxorSUPLO
— Rue Mohr (@RueNahcMohr) July 8, 2022
ちょうどよいバネをダイソーで見つけました。

このバネを機体の股関節2か所に3Dプリントした治具を用いて固定しました。

この状態で歩行を試してみたのですが大きな改善はなく、そもそも股関節のロール軸サーボを固定する土台の強度が弱いことに気づきました。
股関節強度改善
ロール軸サーボの固定があまいことが判明しましたので、バネは取り外して3Dプリントした板治具で強化しました。
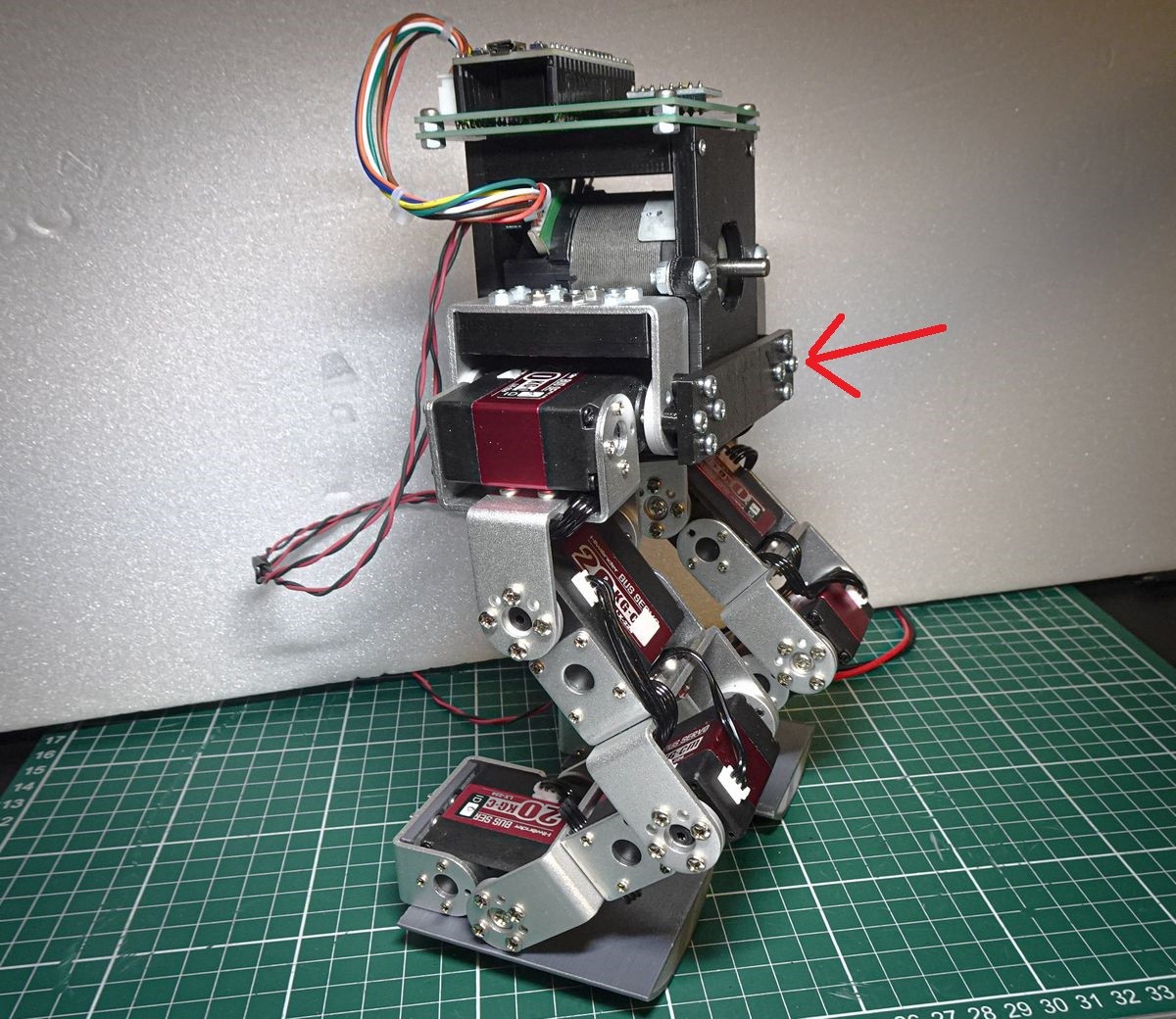
前面と裏面に治具でねじ止め固定しました。倒立が非常に安定しました♪
足の付け根 強化
凄く安定した。
こんな元気な彼 久しぶりに見たロボットは頑丈に作るべくなんだなぁ#2足歩行ロボット #ReactionWheel #Robotics pic.twitter.com/mS3oz7ICPE
— HomeMadeGarbage (@H0meMadeGarbage) September 6, 2022
サーボの問題ではなく単純に私の作りこみがあまいだけでした。
サーボを疑ってしまい申し訳ございませんでした (m´・ω・`)m ゴメン…
歩行検討
股関節サーボの固定を強化し倒立が安定したので、早速歩行動作を実施しました。
歩けた―!!!#2足歩行ロボット #ReactionWheel #Robotics pic.twitter.com/6t2D6YXEeU
— HomeMadeGarbage (@H0meMadeGarbage) September 6, 2022
見事に一歩踏み出せました!!
もう一方の足でも踏み出せました!!
おわりに
ついにSHISEIGYO-1 Walker 参 の歩行動作が実現できました!
当初はシリアルサーボLX-244のギアの遊びで歩行動作は無理だと思っていましたが、単純に作りこみがあまいだけでした。。。
当たり前ですがロボットは頑丈に作らないといけませんね。
いずれ金属加工なども検討したいものです。
しかし、ここでは大きな進捗を得ましたので、次に向けて頑張りたいです。
歩行動作の最適化やバッテリ内蔵など検討いたします。
次の記事

関連記事
 SHISEIGYO-1 Walker 参 を実現させたい俺1 ーサーボ味見ー
SHISEIGYO-1 Walker 参 を実現させたい俺1 ーサーボ味見ー
 SHISEIGYO-1 Walker 参 を実現させたい俺2 ー倒立実現ー
SHISEIGYO-1 Walker 参 を実現させたい俺2 ー倒立実現ー
 SHISEIGYO-1 Walker 参 を実現させたい俺3 ー歩行検討1ー
SHISEIGYO-1 Walker 参 を実現させたい俺3 ー歩行検討1ー
 SHISEIGYO-1 Walker 参 を実現させたい俺4 ー歩行検討2ー
SHISEIGYO-1 Walker 参 を実現させたい俺4 ー歩行検討2ー
 SHISEIGYO-1 Walker 参 を実現させたい俺6 ーバッテリ内蔵ー
SHISEIGYO-1 Walker 参 を実現させたい俺6 ーバッテリ内蔵ー
 SHISEIGYO-1 Walkerを実現させたい俺5 ー歩行検討3ー
SHISEIGYO-1 Walkerを実現させたい俺5 ー歩行検討3ー
 SHISEIGYO-1 Walker 弐 を実現させたい俺1 ーキックオフー
SHISEIGYO-1 Walker 弐 を実現させたい俺1 ーキックオフー
 SHISEIGYO-1 Walker 弐 を実現させたい俺2 ー歩行検討ー
SHISEIGYO-1 Walker 弐 を実現させたい俺2 ー歩行検討ー