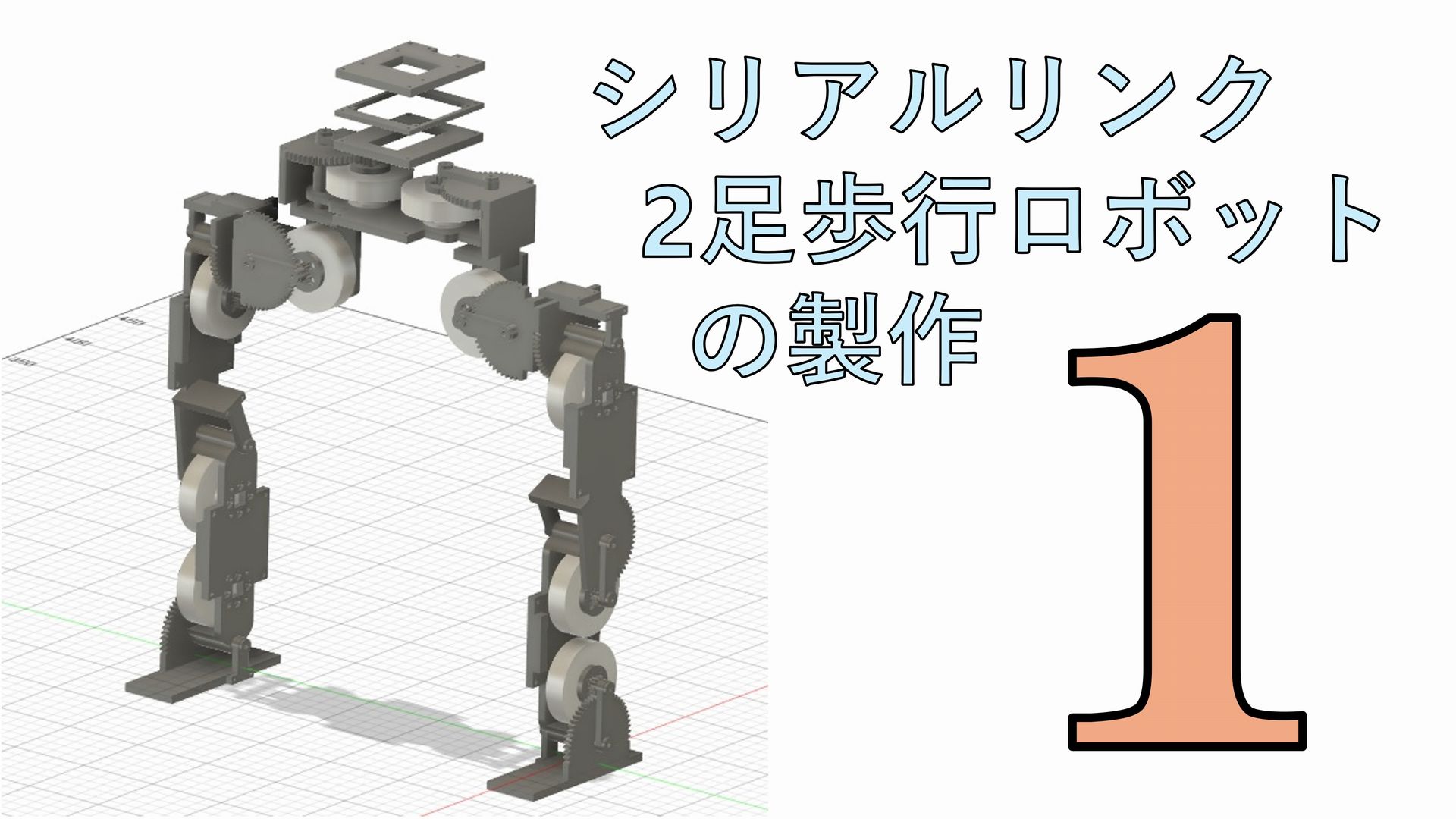
シリアルリンク 2足歩行ロボットの製作2 ー 機体完成 ー
本記事にはアフィリエイト広告が含まれます。
この度 ブラシレスモータを用いた高自由度のシリアルリンク機構の足を有する2足歩行ロボットの完成を目指しプロジェクトをキックオフしました。
まず4自由度の足で動作確認するべく、前回は片足を完成させました。
今回は2足の完成を目指して作業進めましたので報告いたします。
目次
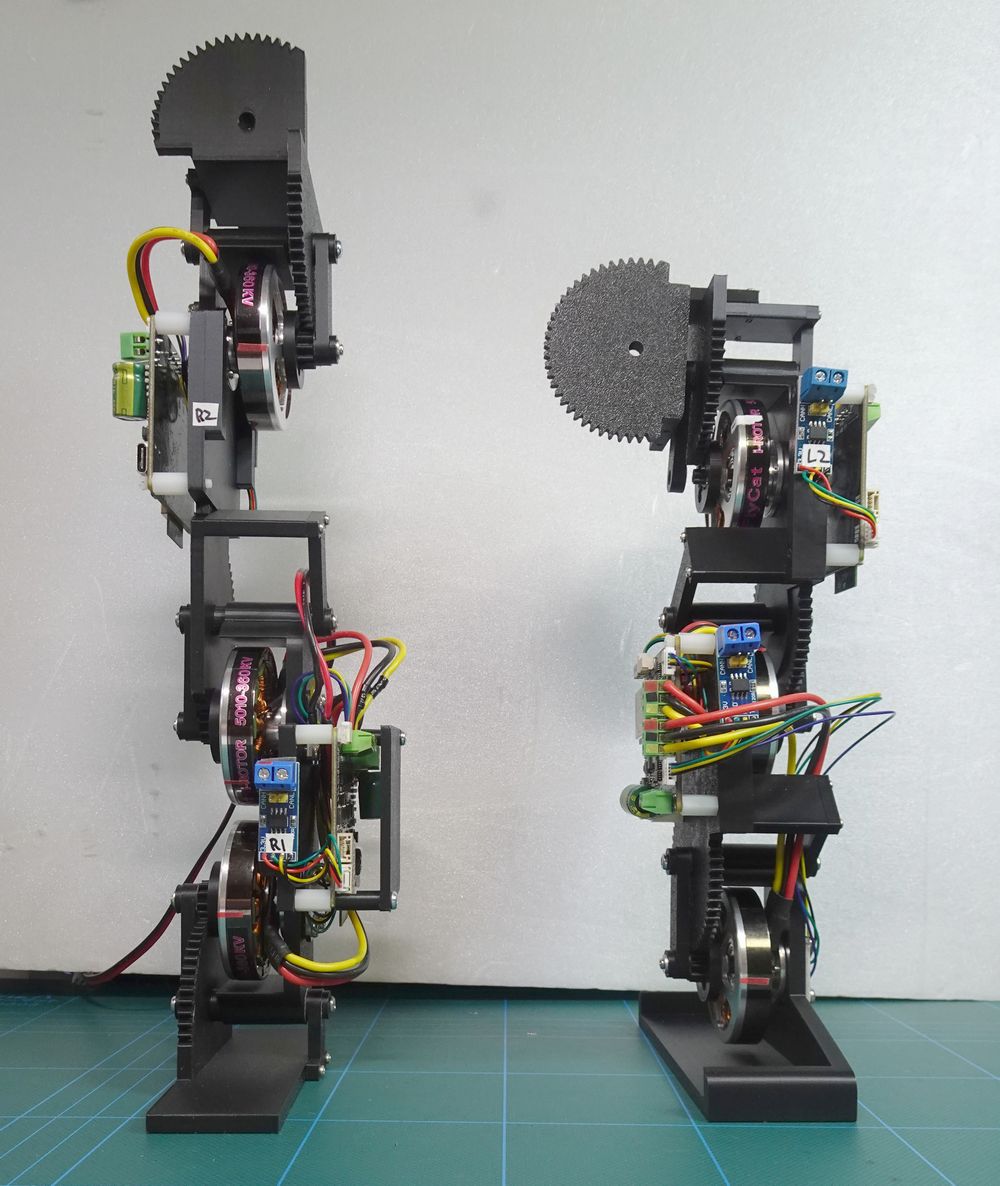
2足目作製
2足目の股関節完成
右足製作開始 pic.twitter.com/WDzs653Ga3
— HomeMadeGarbage (@H0meMadeGarbage) April 23, 2025
2足目完成!
右足も完成 pic.twitter.com/eWSp10Jb5i
— HomeMadeGarbage (@H0meMadeGarbage) April 24, 2025
足長でカッコいい!
robotics pic.twitter.com/yYAc38Dshm
— HomeMadeGarbage (@H0meMadeGarbage) April 24, 2025
両足の配線、制御部も完成させて動作確認。
でけたで pic.twitter.com/X2bulaBMD7
— HomeMadeGarbage (@H0meMadeGarbage) April 24, 2025
立たせて動作確認
立った立った
一番懸念してた足首トルク不足も問題なさそう各部のモータのパラメータ調整がしんどいだろうね。
あとやっぱ足の間隔広すぎるかな。。 pic.twitter.com/NNijgr4Rkh— HomeMadeGarbage (@H0meMadeGarbage) April 24, 2025
足が長いためちょっと各モータ苦しそう。。。
あと足の間が広すぎるかなぁ
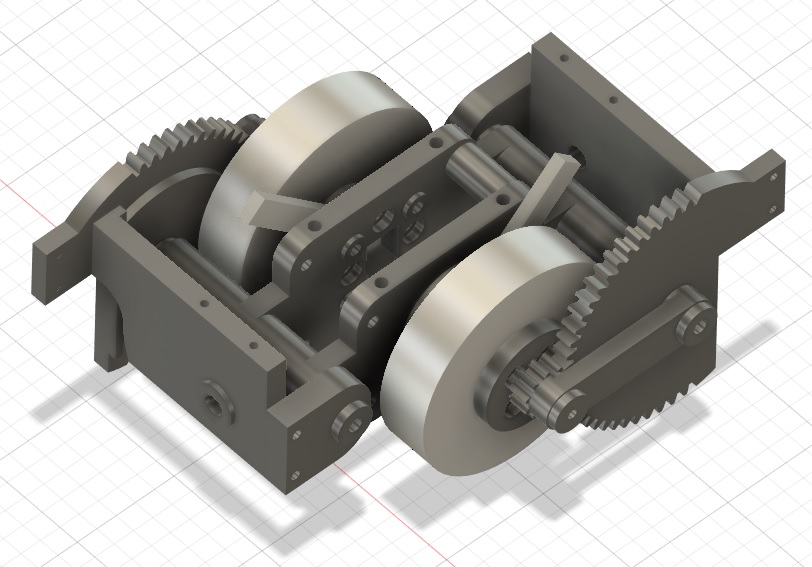
機構
本ロボのシステムは以下のとおり
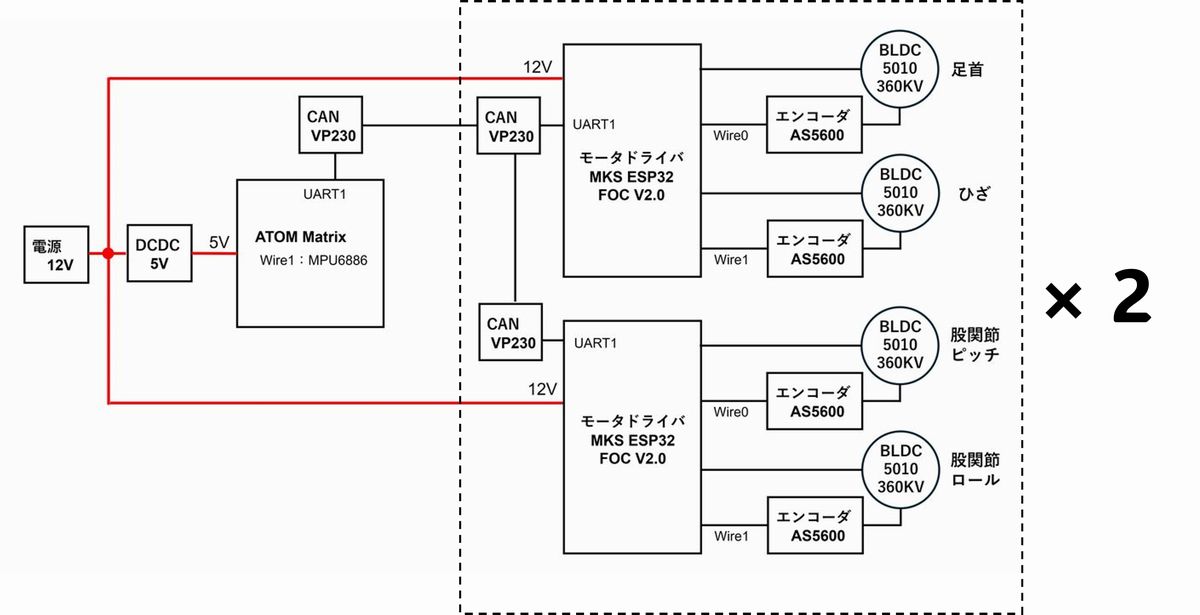
CAN通信によって中枢コントローラ(ATOM Matrix)から各モータドライバにモータの回転角度を送信して足運動を制御しています。
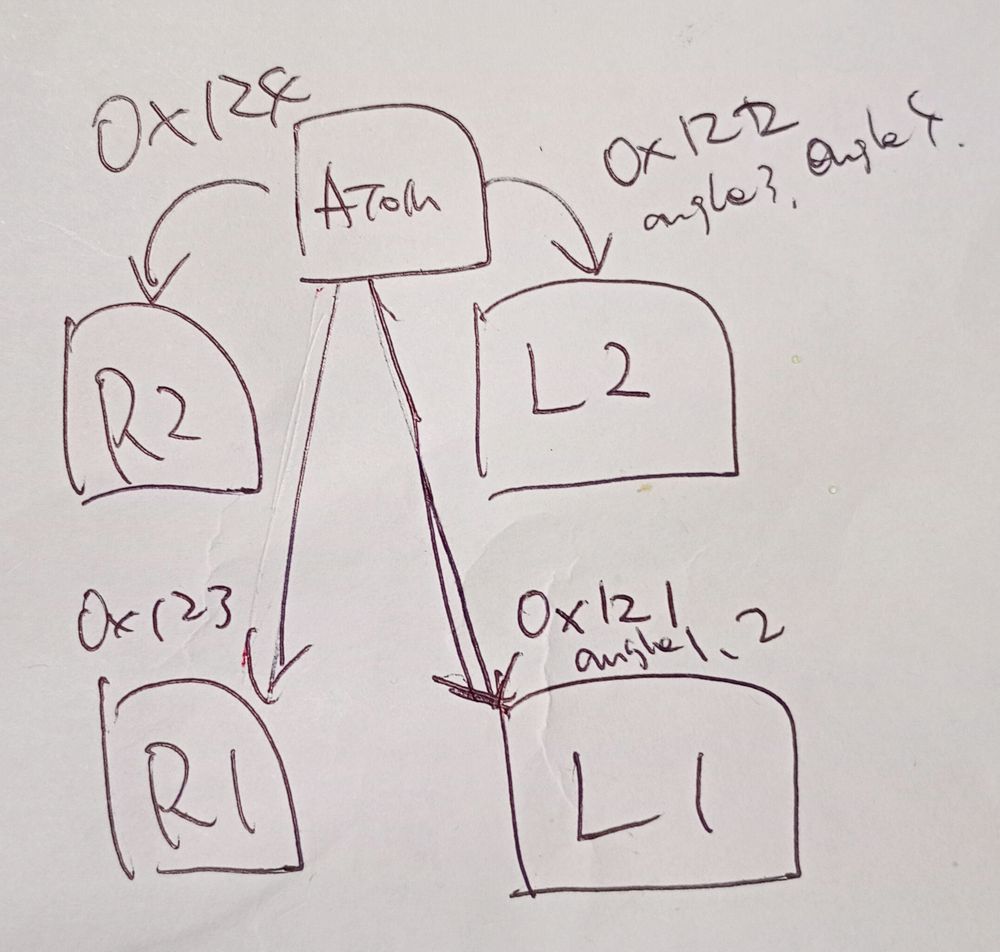
CAN通信のIDは以下のとおり
足間隔調整
2足の間を詰めるためにロール軸モータの配置を変えてみましたが。。。
足間隔詰めたら全長高くなってとても取り扱えない。。
隣のガンダムはHGじゃないよ 1/48スケールやり直し! pic.twitter.com/GjSsVaj0qc
— HomeMadeGarbage (@H0meMadeGarbage) April 25, 2025
全長が高くなりすぎて とても取り扱えそうもない代物になってしまいました 😥
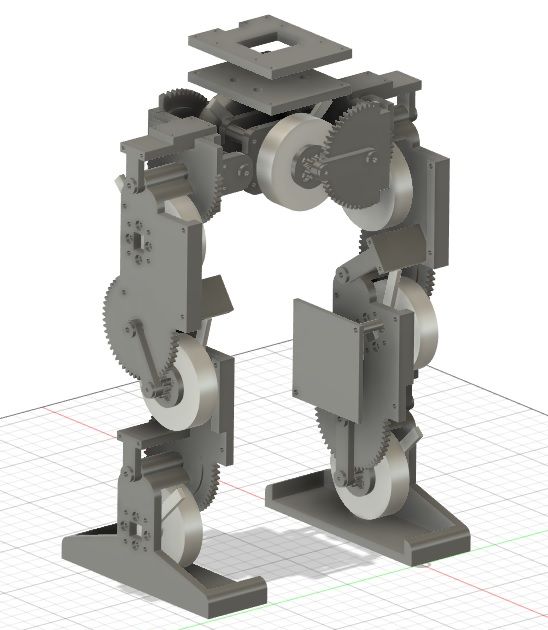
機体再調整
全長や足幅を最適化するために期待を再設計することにしました。
足を極力短くしました。
大腿・下腿の長さを120mmから80mmに縮小
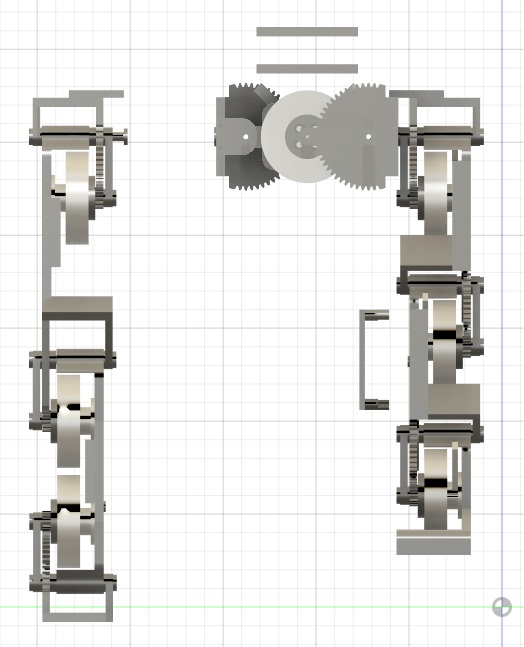
またロール軸モータは前後に配置して足の間隔を詰めました。
足製作
早速 足再製作
足作り直し中 pic.twitter.com/0aGDcE0gB5
— HomeMadeGarbage (@H0meMadeGarbage) April 26, 2025
足の可動範囲も確認しながら、足の長さと合わせてモータ配置位置なども調整
下腿Fix pic.twitter.com/YJ2Gl0wl3e
— HomeMadeGarbage (@H0meMadeGarbage) April 26, 2025
かなり足を縮小できました。
片足完成!
新左足完成 pic.twitter.com/xBD2mmyPWQ
— HomeMadeGarbage (@H0meMadeGarbage) April 27, 2025
機体製作
片足動作の結果をうけて新機体の設計が決定いたしました。
新設計版の2足歩行ロボットの完成を目指します。
他方の足も組立て。現実的なサイズになりました。
全て結線して動作を確認
結線完了 pic.twitter.com/vOxNEnXcDX
— HomeMadeGarbage (@H0meMadeGarbage) April 28, 2025
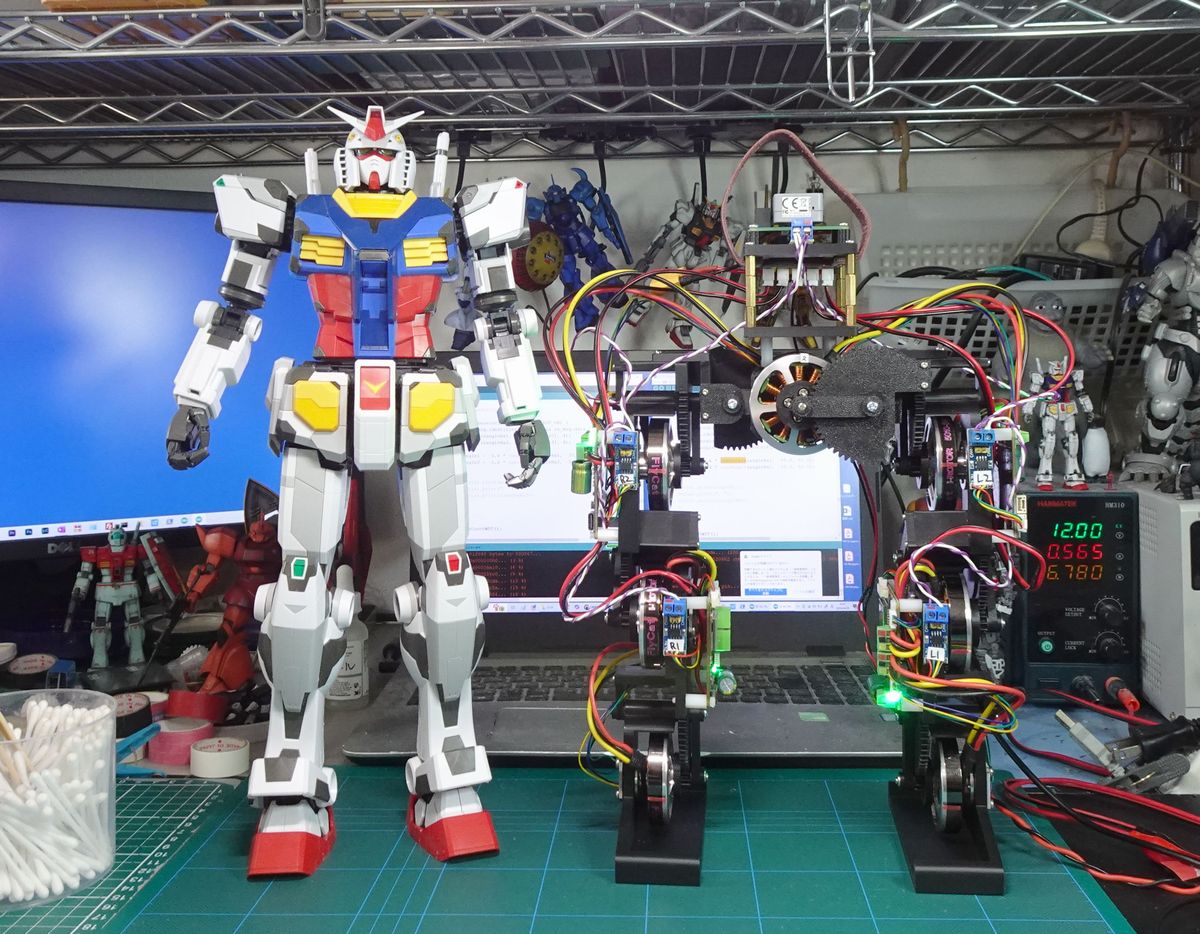
完成
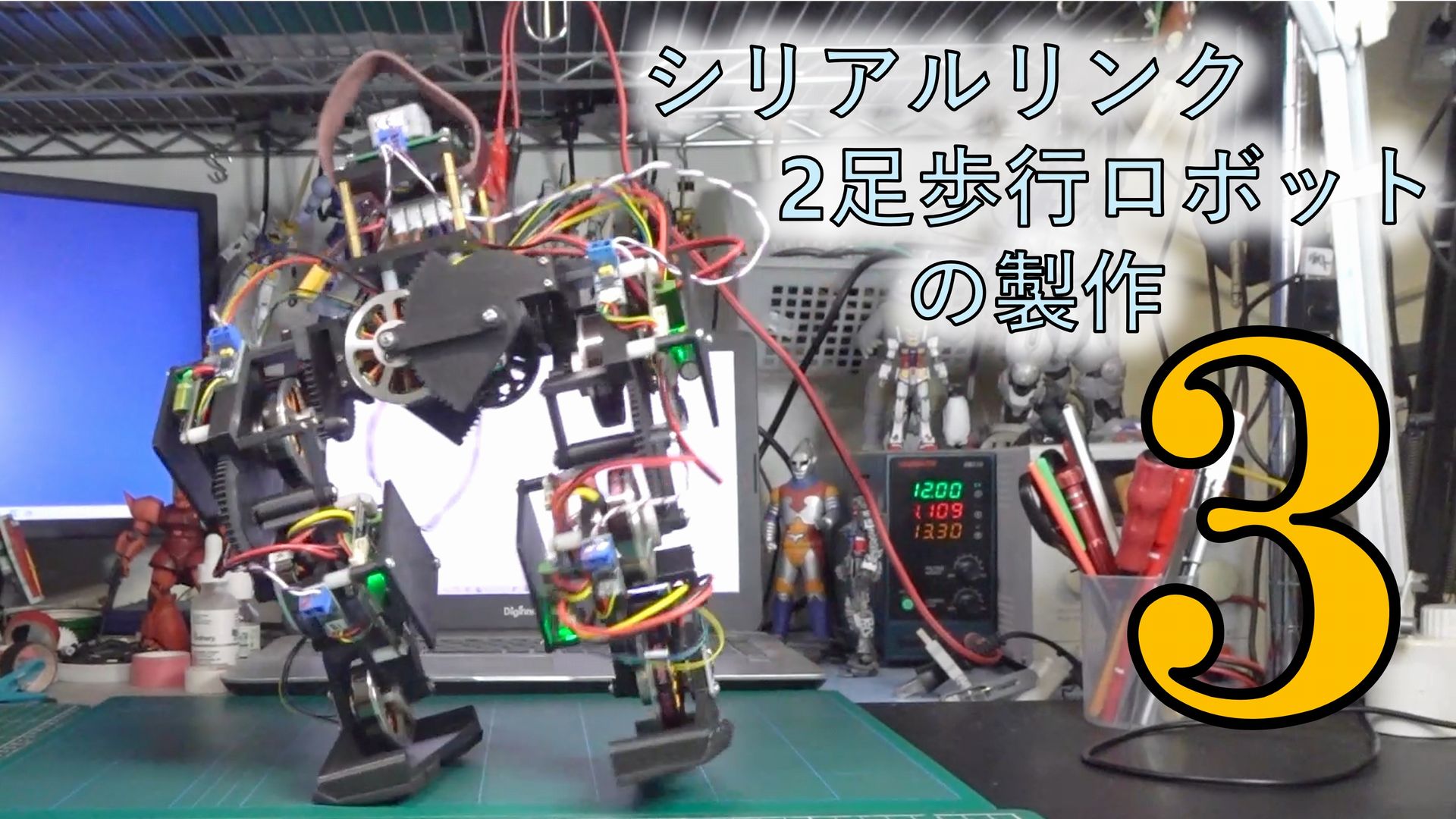
遂にシリアルリンク機構の2脚ロボットが完成いたしました。
おわりに
ここではブラシレスモータを用いたシリアルリンク機構の足を有する2足歩行ロボットの完成を目指し、4自由度の2脚ロボを完成させました。
EVO pic.twitter.com/7ZV7d9CuzN
— HomeMadeGarbage (@H0meMadeGarbage) April 28, 2025
やっと機体が完成しましたので、いよいよ次回は歩行などの動作検証を実施したいと思います。
それではまた