ブラシレスモータで2足歩行ロボット10 ー 動作検討2 ー
本記事にはアフィリエイト広告が含まれます。
前回はCAN通信を導入してモータトルクによるウェイトシフト検知での足踏み動作を確認しました。
足踏み
念願のモータトルクからウェイトシフト検知して足切換自動化
やっとできたわ。 pic.twitter.com/ybZTfLDgAT— HomeMadeGarbage (@H0meMadeGarbage) March 25, 2025
ここでは更に歩行などの基本動作の確認を実施します。

目次
歩行
トルク検知によって安定した足上げが実現できるようになったので、歩行も簡単に実現できました。
トルク検知で優等生になっちゃって
なんだかつまらなくなった。。。 pic.twitter.com/sXUmrdNVcI— HomeMadeGarbage (@H0meMadeGarbage) March 26, 2025
足上げ中に足を前後するだけですからね。
縦横無尽に机上を大暴れ (ジャマ。。。)
2足歩行ロボット机上で大暴れ
あージャマ! pic.twitter.com/PpvnJdC9EC— HomeMadeGarbage (@H0meMadeGarbage) March 26, 2025
特製のハイテクノロジー外装で歩行
トルク検知によって安定した左右の足運動の切り替えができるようになり、それに伴って足上げ高さも十分確保できて歩行もバッチリできるようになりました。
でも。。。
本家様を見てみましょう
🚨Introduced at #GTC25: Newton is an open-source extensible physics engine being developed by NVIDIA, @GoogleDeepMind, and Disney Research to advance robot learning and development. ⚡️
Learn how physics engines and #physicalAI models are driving the future of #humanoidrobots.… pic.twitter.com/nAfyLSIDsp
— NVIDIA Robotics (@NVIDIARobotics) March 19, 2025
うん!全然違う!!
足接地と同時に他方の足上げてるからすごくスムーズで生き生きしてる。。。
家のニセドロイドは足接地後の反動で他方の足にウェイトシフトしたのを検知して左右足動作切り替えしてるから、ワンテンポ動作が遅れているのよ。
接地直後に切り換えてスムーズに動作させたいけど反動が大きくて難しい。
ロール軸ブラシレスモータの応答の調整も頑張りましたが無理でした。
足底素材検討
ワンテンポ遅れた動作でもしょうがないかぁ などと思いながらディズニーの論文を眺めていると
”足底はウレタンフォームで成形して衝撃緩和している”
と記載されていました。
制御だけではなく素材にも心配りされていたのですねぇ。
家にあった緩衝材
そこで足裏緩衝材を試すことにしました。
まずは家にあった100均で購入の赤ちゃんを角から守るやつを試してみます。
若干のクッション性があるので緩衝材になるのでは

表面はつるつるで滑りそうなので お滑り防止シートを貼る
足踏み動作で素材を評価
ワイのロボット接地後の反動で他方に重心かかったのをトリガに他方動作開始しとる。
やわらかカマボコ足にしたら反動なくなってトリガ検出できなくなるかなぁなんて期待したけど
全然反動低減なし!
しかもコイツ自体は表面つるつるで滑るし
けしからん!ボツ!! pic.twitter.com/qUuxTHFdBY— HomeMadeGarbage (@H0meMadeGarbage) March 27, 2025
反動が減っている感じは全くなし!
しかもシートなしでは滑るのでボツ!!
KSD1-25TW D型スポンジケーブル用パイプ
ホームセンターにいって使えそうな素材を2種類 買ってきました。
10cm単位で切り売りしてました。
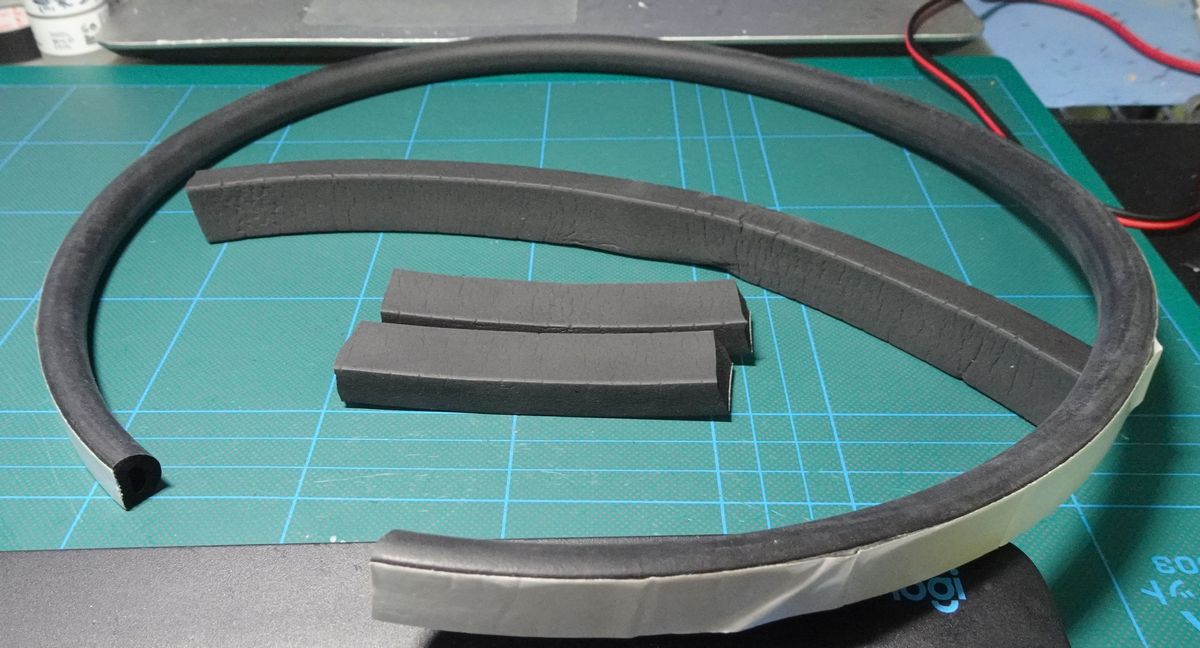
まずは D型スポンジパイプとやらを試してみます。

同様に足踏みで検証
衝撃吸収どころが増加
そりゃ中空はもうバネよ滑りはないけどバネ! pic.twitter.com/M3PKvQieRJ
— HomeMadeGarbage (@H0meMadeGarbage) March 27, 2025
逆に反動増加。。。
中空パイプは もはやバネでした。
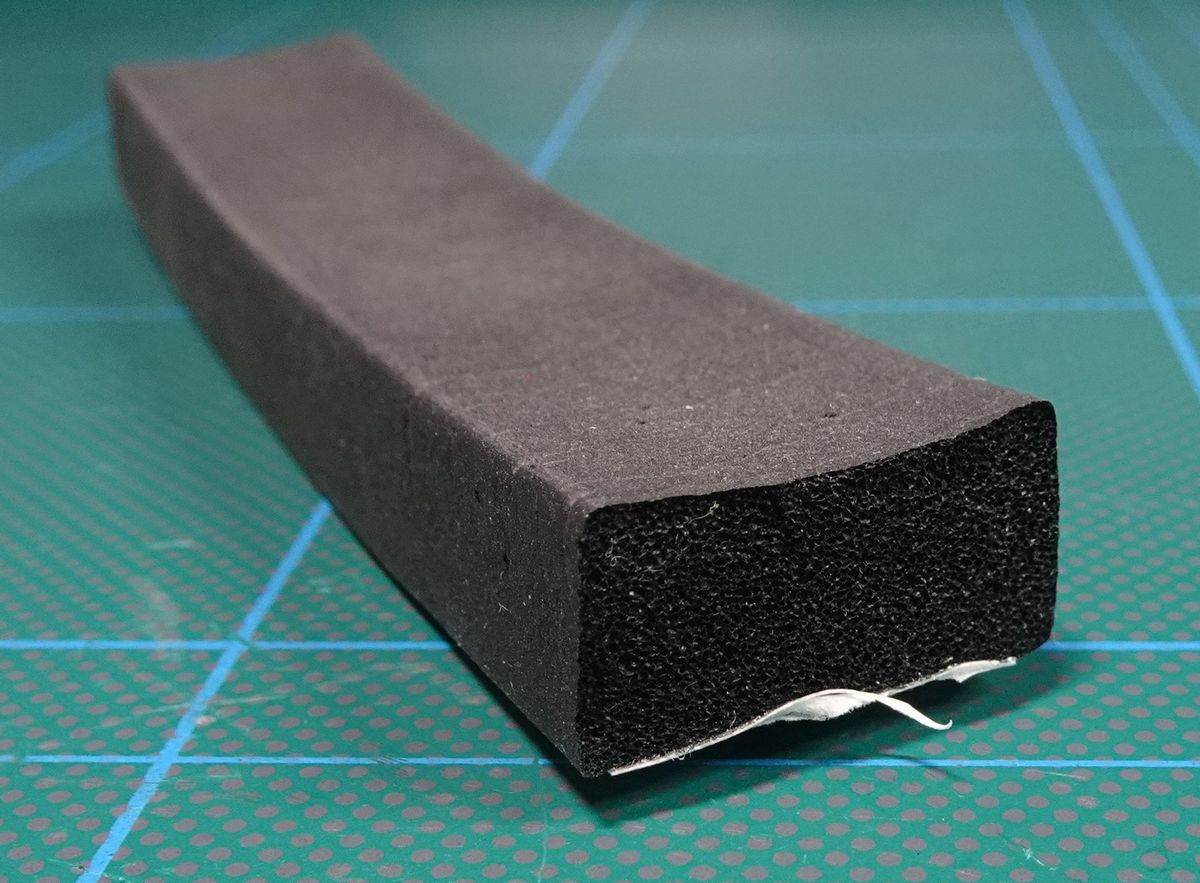
シールフレックスモールド SFM006
続いて低反発のゴムスポンジを試します。
低反発って言ってるし反動低減に期待が持てます。
おなじみの足踏み検証
反発がなくなって動作トリガ手法を改革せねばってほどではないけど
たしかに反発が低減して周期が速くなった。滑りもないし
コイツで動作カスタマイズしてみるか
その価値あり pic.twitter.com/SoAv1uXSnB— HomeMadeGarbage (@H0meMadeGarbage) March 27, 2025
お!反動が減った。
足踏みは従来の接地後の反動による他方の足へのウェイトシフトをトリガに左右切換で実施していますが、反動が減ったためか足踏み周期も速くなっているようです。
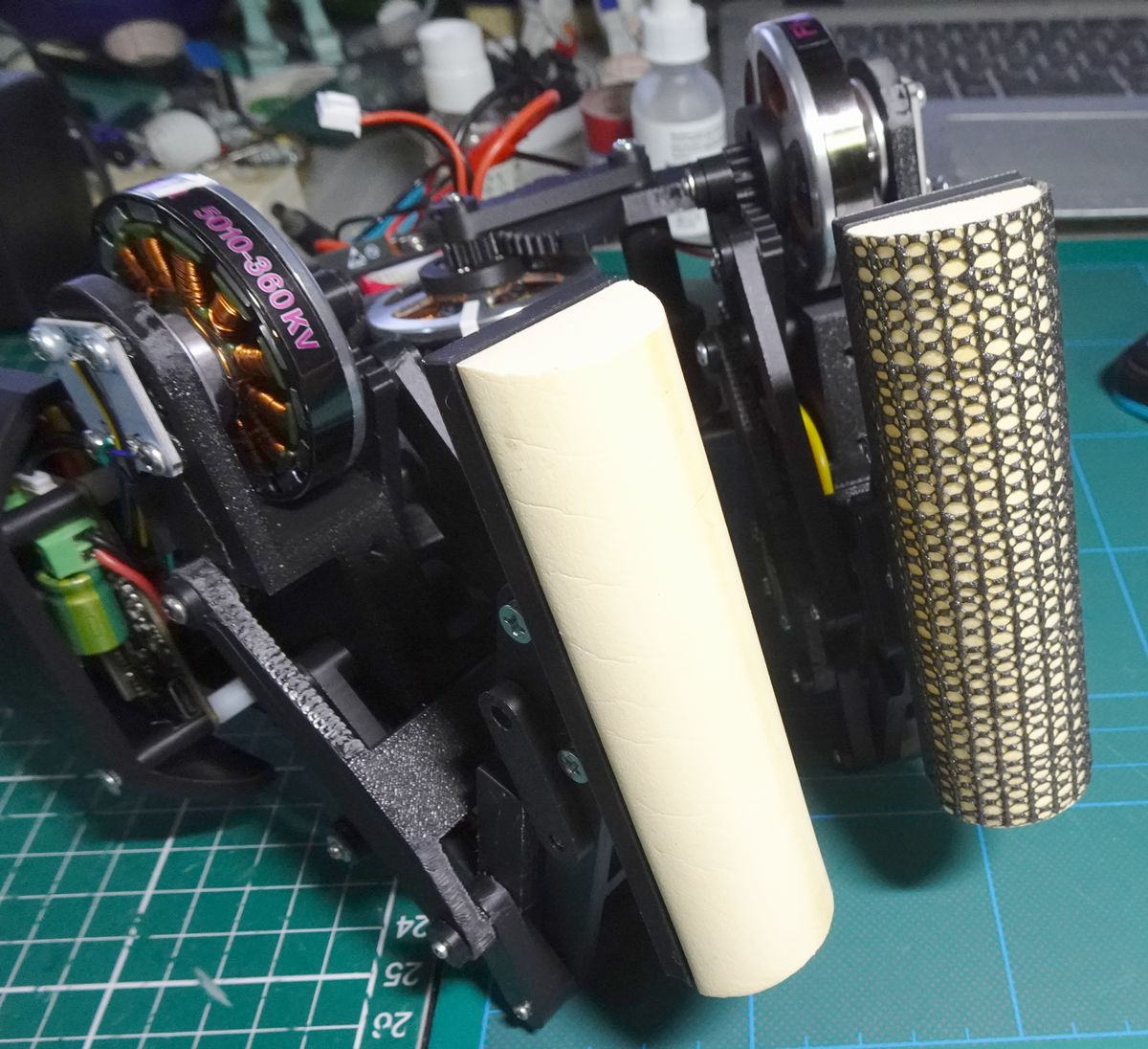
なんだかイケそうなので、ちょっと調整して足踏みの左右切換のトリガを接地時に変更してみたところ
足裏を低反発スポンジにして調整したら
憧れの足下げ接地トリガによる左右切換足踏みができた!!↓時間シーケンスではなく接地をトルクで検知してやってんの自動で pic.twitter.com/kvuTX7YRdc
— HomeMadeGarbage (@H0meMadeGarbage) March 27, 2025
できたー!!
接地トリガによる左右切換スムーズ足踏みができてしまいました。
そっかー足底素材への心配りも必要だったかぁ
奥ぶけー
まじかー素材ひとつで性能激変するんだけど
やばいことに手をでしてしまったかもしらん pic.twitter.com/k5zLFEHtIS— HomeMadeGarbage (@H0meMadeGarbage) March 27, 2025
ついに憧れのスムーズ足運動が実現できました。
— HomeMadeGarbage (@H0meMadeGarbage) March 27, 2025
本家様と比べても遜色は。。。
あるけどかなりいい線いってるよね。
あとこの低反発ゴムスポンジ シールフレックスモールドのかまぼこ型の製品もあるようなので入手していつか試してみたいです。
わーかまぼこ型のシールフレックスモールドもあるのか!
これを切り売りしてるホームセンターに行きてーシールフレックスモールド SFM-007 pic.twitter.com/TXncaFIhEo
— HomeMadeGarbage (@H0meMadeGarbage) March 27, 2025
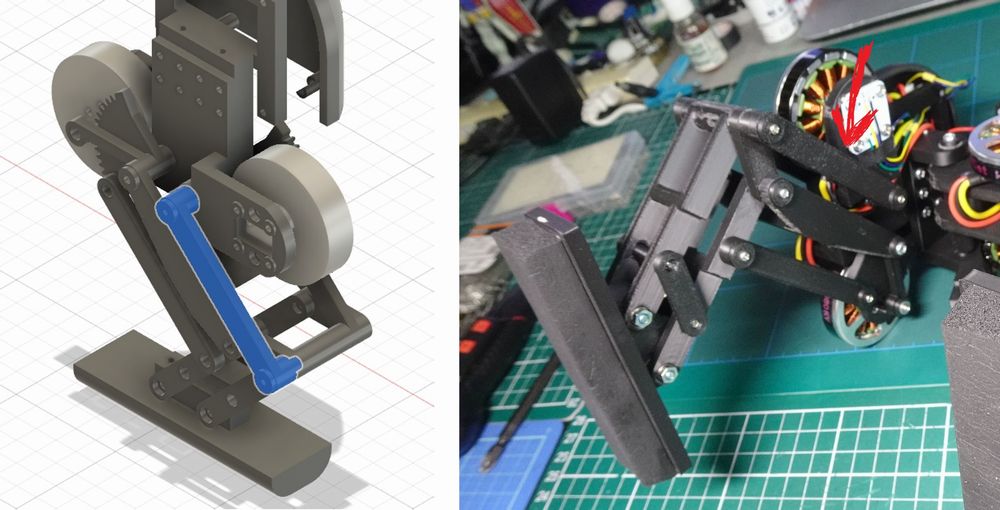
足強化
足底に低反発スポンジを採用したことで更に大腿部のウィークポイントに気づけたので1本アーム追加して強化しました。
歩行2
接地トリガのスムーズな左右切換足踏みが実現できましたので、歩行も確認します。
これあの装甲付けてやったらバズるぞ~ グヘへ
サイドステップは要調整 pic.twitter.com/lyCnfAVzH4— HomeMadeGarbage (@H0meMadeGarbage) March 28, 2025
歩行もいい感じ!
横移動はまだ調整が必要ですね。。。
横移動時のロール軸の変位量調整
横移動 危なっかしい
しかし足が接地してから他方が運動を開始している様子が良く分かる動画でも横は割り切ってすり足にした方がいいかも pic.twitter.com/fibsPHxpMr
— HomeMadeGarbage (@H0meMadeGarbage) March 29, 2025
なんとか転ばずに横移動できるようになったけど 危なっかしい。
足上げ量とかも自動化したほうがいいかもしれませんね。
前回の蹴り上げ角度から次回の蹴り上げ強さ変動させるとか。。
足下げタイミングを角速度ではなく角度の上限で制限するとか。。。
まだまだ考えるべきことはたくさんあります。
おわりに
ここでは歩行動作の検証を実施しました。
足底に低反発スポンジを採用することでスムーズな足運動動作を実現することができました。
前述の通りまだまだ考えるべき要素はあります。
足運動は以下がまだ自動化されていません。
・足地面蹴り上げ強さ
・足上げ量とスピード
・歩行時の前後歩幅・ロール軸角度
コレらを自動化できれば、更に動作が安定しそうですが難しそうだなぁ。。。
いやだなぁプログラミング、、、
あとは足のヨ―角追加もどこかで考えたいですね。
まだまだ道のりは長いけど
ひとまず達成感は得られました。
とにかく続ける pic.twitter.com/EU21AbGlqv
— HomeMadeGarbage (@H0meMadeGarbage) March 29, 2025
ではまた