ブラシレスモータで2足歩行ロボット3 ー 基本動作 ー
本記事にはアフィリエイト広告が含まれます。
前回はブラシレスモータサーボによる2足歩行ロボットを完成させました。
ここでは色々動作確認実施しましたので報告いたします。

目次
初期動作確認
以下は足の座標をPS4コントローㇻで指定して動かしているところ。
これは前回も確認済み。
大変元気
考えるべきことが多い pic.twitter.com/Fn3Yqq2qad— HomeMadeGarbage (@H0meMadeGarbage) February 15, 2025
なかなか応答が良いですね。
足先をかまぼこ状にしていたのですが、揺れがハンパない。。
かまぼこ足はやめた方がよさそうだな pic.twitter.com/ToV8CRnsZY
— HomeMadeGarbage (@H0meMadeGarbage) February 15, 2025
揺れ軽減のために足先をブレード状に変更しました。
足先をブレード状に変更
気に入ったみたい pic.twitter.com/5pvcTvxAiH— HomeMadeGarbage (@H0meMadeGarbage) February 15, 2025
SimpleFOC
ちなみにブラシレスモータはSimpleFOCの電流駆動の回転角度指定で動かしています。
|
1 2 |
motor1.torque_controller = TorqueControlType::foc_current; motor1.controller = MotionControlType::angle; |
逆運動学によって角度が算出され、その角度をブラシレスモータの回転位置として指定して2足歩行ロボット操作を実施しています。
ブラシレスモータの制御ブロックは以下のとおり
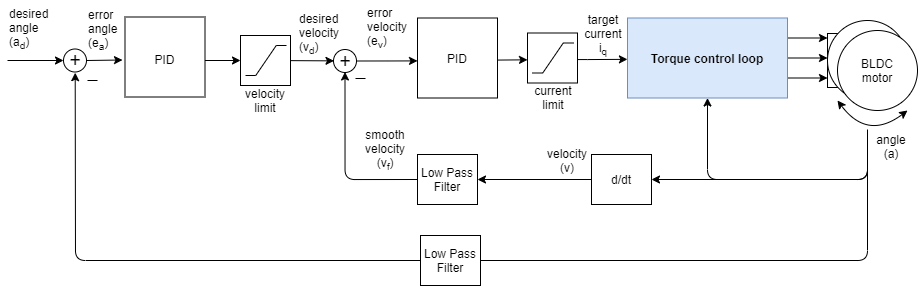
目標角度に向けて電流ベクトル制御がなされます。
電流制限 (ここでは6Aとした)もかかるので安心してロボット制御が楽しめます。
構成
モータ周りの構成は前回と同様
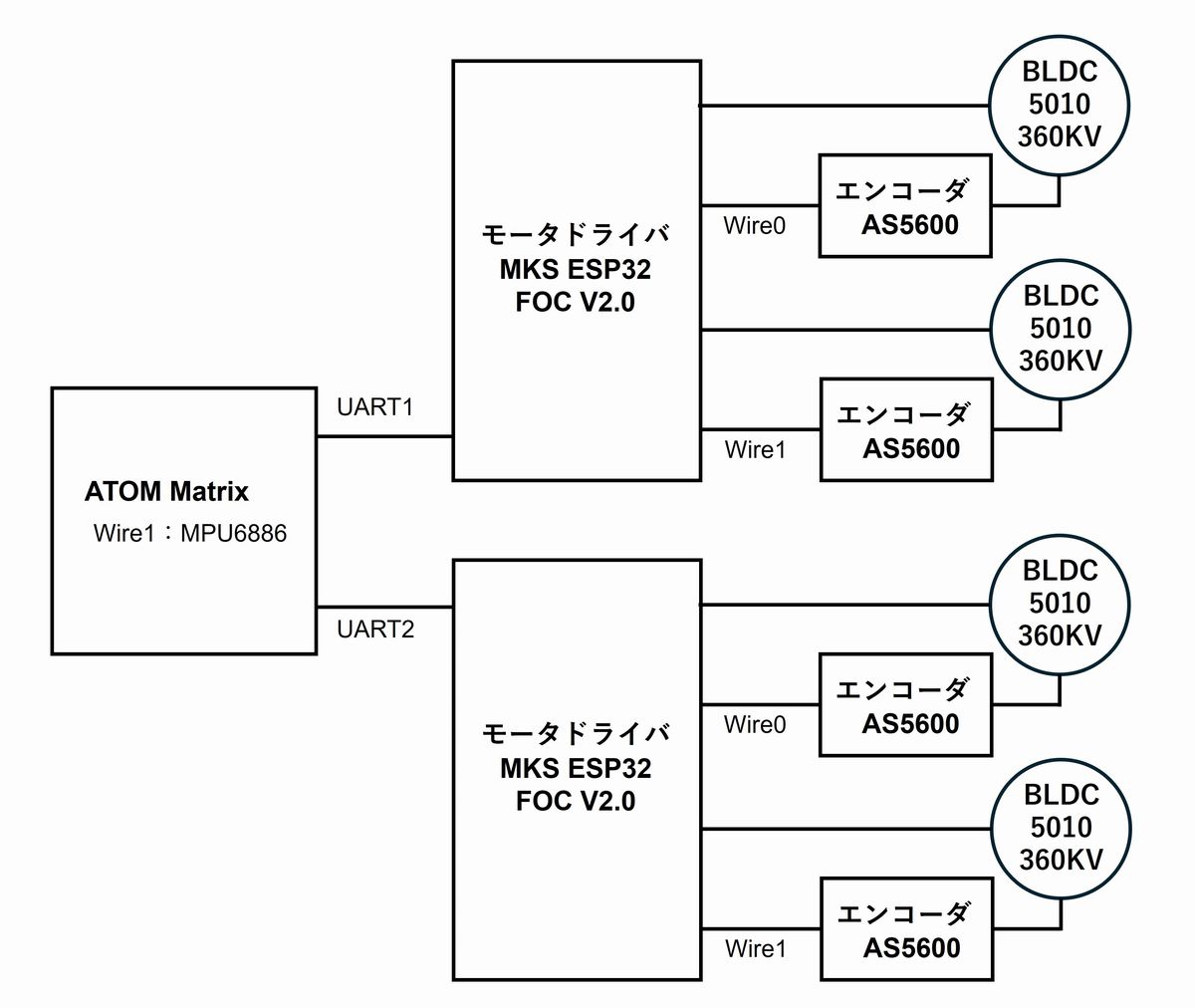
- ATOM Matrix
- MKS ESP32 FOC V2.0

- 磁気エンコーダ AS5600
- 5010 360KV

足上げ動作
足踏み運動を考えます。
本ロボットはロール軸がなく足は上下前後のみ足先移動が可能です。
それでもしっかり足を上げたいと考えております。
ロール軸のない2足歩行ロボットの足上げ動作の検討は以前にも実施済みです。
ATOM Matrix内蔵のIMUで姿勢をセンシングしつつ足踏み動作実施。
ロール軸なくてもこんなに元気に足上げ
IMUで姿勢センシングして半自動 pic.twitter.com/rFp7aHX0ic— HomeMadeGarbage (@H0meMadeGarbage) February 16, 2025
以前検討した足上げ動作をブラッシュアップして足踏みさせてみました。
- 地面を蹴り上げてから機体の角速度の正負が切り替わりのタイミングで足を下げる
- 足下げ後 角速度が設定値以下になったら(機体揺れ防止のため) 再度足を跳ね上げて動作を繰り返す
以上のように半自動で足踏みを実現させています。
ロール軸なしでもしっかりと足を上げれております。
歩行も同様に足上げ動作させて前後動作追加で実現
ちょっと足軽すぎてるけど
しっかり足上げての歩行 pic.twitter.com/cVmsUIxcl6— HomeMadeGarbage (@H0meMadeGarbage) February 16, 2025
ジャンプ
ブラシレスモータサーボにより元気のよい足が実現できましたのでジャンプ動作も確認します。
足の運動を外部から指定したくパソコンからUDP (Node-RED) で足位置を制御できるようにしました。
UDP#nodeRED pic.twitter.com/nGgnPgh66o
— HomeMadeGarbage (@H0meMadeGarbage) February 17, 2025
↓足高さを正弦波状にUDP送信
正弦波 pic.twitter.com/vdVv3dd8N7
— HomeMadeGarbage (@H0meMadeGarbage) February 17, 2025
足を伸縮させてジャンプさせました。
スンと高くジャンプ!しかも軽やか 😆
こいつはゴキゲンだ
足を後ろ斜めに伸ばすようにジャンプすれば うさぎ跳びの実現です。
ゲロゲロ pic.twitter.com/3VUcgvllDL
— HomeMadeGarbage (@H0meMadeGarbage) February 17, 2025
ブラッシュアップ
基本歩行やジャンプ動作が確認できましたので、更に作りこんでいきます。
LiPoバッテリ
電源を3セルLiPoバッテリにしてコードレス化
自由に動き放題だ
やっぱりジャマだ pic.twitter.com/2CBFA0Ttbo
— HomeMadeGarbage (@H0meMadeGarbage) February 18, 2025
足修正
前後のバランスがどうしても悪いので足のブレードを伸ばします。
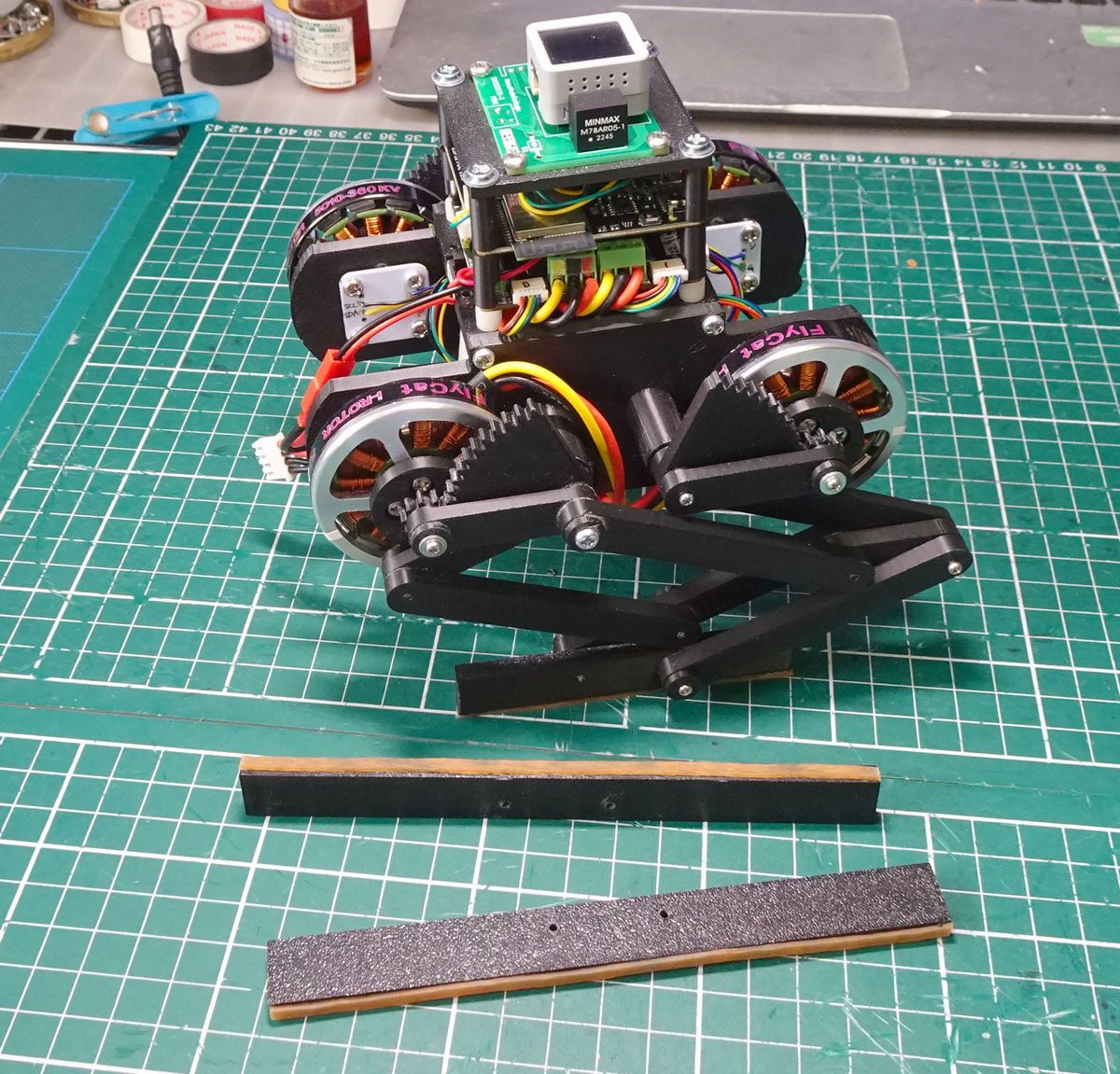
前後に転ばなくなった
おわりに
ここではブラシレスモータサーボによる2足歩行ロボットの基本動作確認を実施しました。
高いジャンプやロール軸なしでの立派な足上げ歩行を確認できました。
しかし、せっかくブラシレスモータを使用しているのでもっと早く歩きたいわ。
高速足踏みで前後のバランスとりながら立てないかしら?
☟こんな感じで
LimX Dynamics’ Biped Robot P1 demonstrated impressive stability and locomotion capability when kicked and pushed by audience during ICRA 2024, just like how it conqueed the wild in Tanglang Mountain in March.#robotics pic.twitter.com/0bXrPuv7Gz
— LimX Dynamics (@LimX_Dynamics) May 22, 2024
ロール軸がないので左右のバランスはとれないので足の付け位置の幅増しなどで対応しつつ検証してみようかと
小型なのでかなり高速動作が要求されそうですが思い出にやってみたいと今考えております。
ではまた