ブラシレスモータで2足歩行ロボット8 ー 動作検討 ー
本記事にはアフィリエイト広告が含まれます。
前回はロール軸の機構をサーボモータからブラシレスモータに変更してロボットを製作しました。
ここでは本格的にこちらの動作を検討いたします。

目次
サイズ
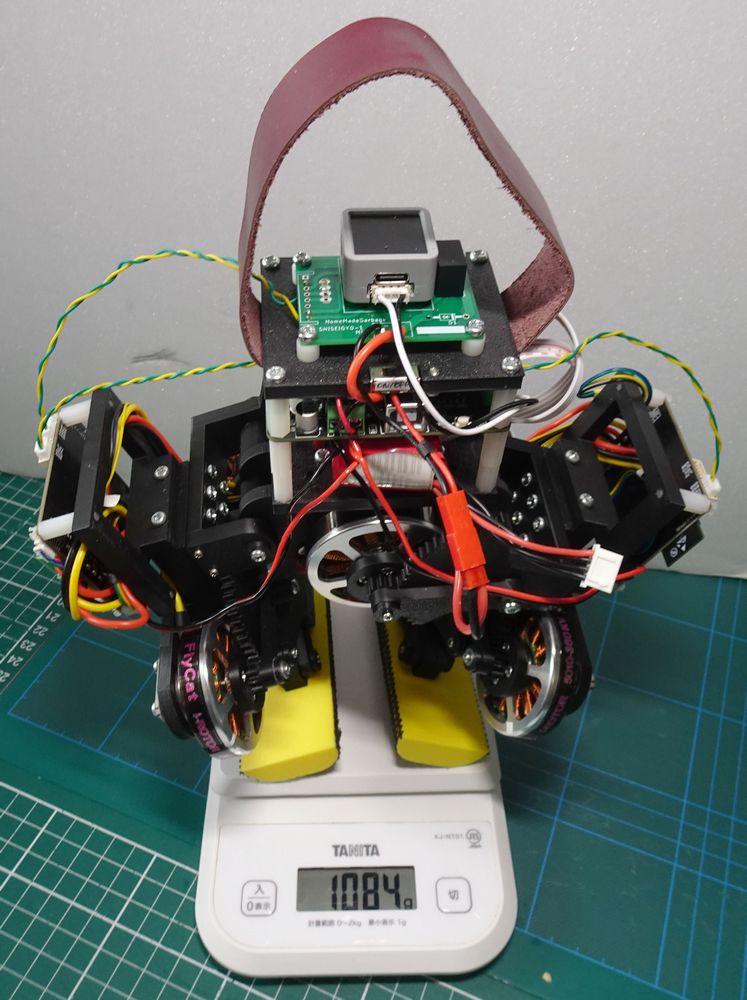
まず本ロボットのサイズのご紹介
通常時高さ 約26cmで重さが1084g
ディズニーの BDX Droid が全長 66cm (アンテナ含まず)、重さ15.4 kgとのことで
大きさ的にはこんな感じ☟
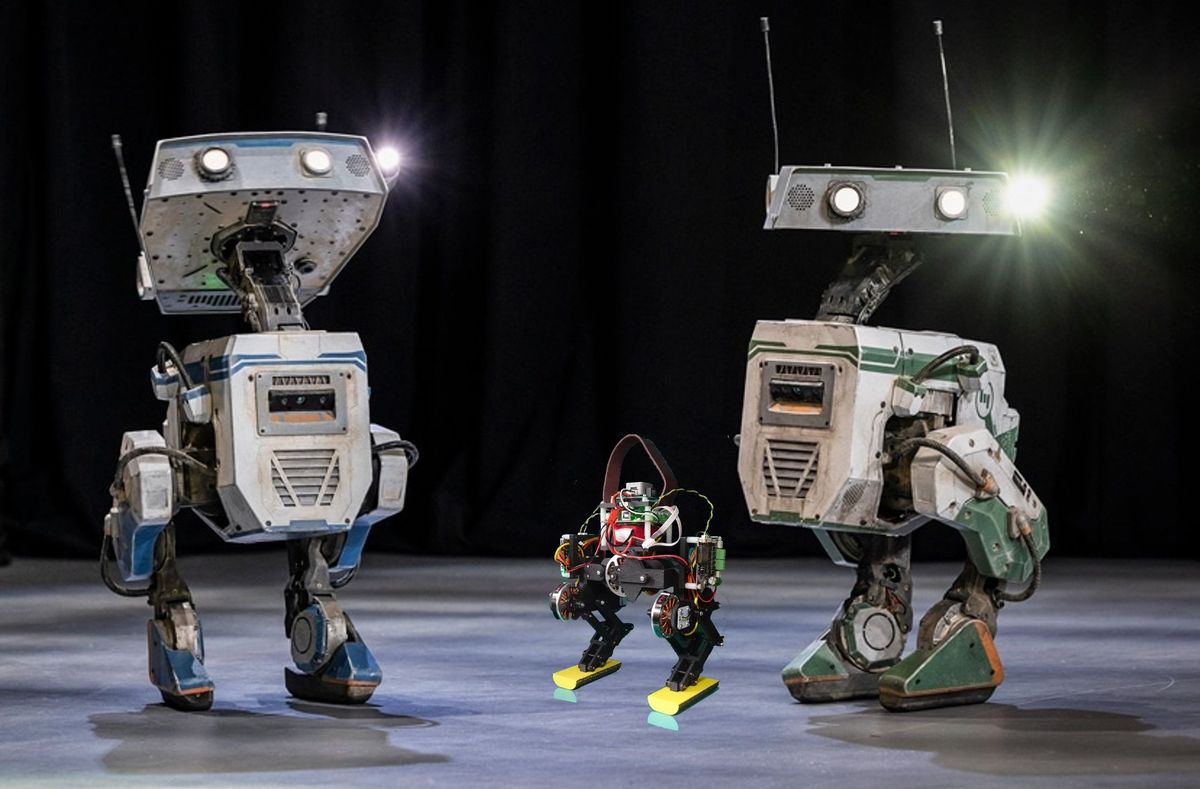
BDX Droid意外とデカいのな。実物見てみたいわー
足踏み検討1
ロール軸をブラシレスモータに変更し応答性が向上したとおもうので、早速足踏み動作の検証を実施
だいぶ高速でステップ踏めるようになってきた pic.twitter.com/6YvAsS8qan
— HomeMadeGarbage (@H0meMadeGarbage) March 17, 2025
なかなかいい応答。
左右それぞれの足上げ動作開始を他方の足が接地してから迅速に実施にすることで振り子のようなウェイトシフトによる足踏みができるようになりました。
接地のジャッジはIMUセンサの角速度の大きさ変化で判定しています。
もう少し足上げを高く出来るように、足上げ前の地面蹴り上げ強度を増しました。
足蹴り上げ強くして振り子の周期落として
足上げ高さ少し確保このイメージで歩行検討します pic.twitter.com/oZ3uFObDgY
— HomeMadeGarbage (@H0meMadeGarbage) March 19, 2025
ウェイトシフト振り子周期は遅くなりましたが足上げ高さは出てきています。
足修正1
検証に際して、足の強度に不満が出てきたので もろもろ修正しました。
大腿部
以前 下肢のぐらつきを添え板で補強したのですが、
次は大腿部のぐらつきが気になり始めました。
大腿部のぐらつきが気になりだした pic.twitter.com/03ucptRKtk
— HomeMadeGarbage (@H0meMadeGarbage) March 17, 2025
大腿部の挟み込みアームを結合するような形状にして、ズレが発生しないようにしました。
ついてに膝部も円柱でつないで補強
大腿部、膝を中心に強化 pic.twitter.com/6SVrhPOVjK
— HomeMadeGarbage (@H0meMadeGarbage) March 18, 2025
足首
大腿部強くしたら足首のぐらつきも気になったので、ボールベアリング導入してM3ネジでしっかり固定しました。

[amazonjs asin=”B07P1XFGBW” locale=”JP” title=”BESTU ベアリング ミニベアリング ボールベアリング MR63ZZ 630ZZ 6mm×3mm×2.5mm 深溝玉軸受 ステンレス 両シールド付 10個入り MR63ZZ-10P”]
これで足首も強なった
足首も強くなった pic.twitter.com/7UtS0fyFhF
— HomeMadeGarbage (@H0meMadeGarbage) March 20, 2025
歩行検討1
先ほどのウェイトシフト振り子足踏みの要領で歩行させてみました。
うーん イマイチ
振り子ウェイトシフト検知だと歩行周期短くて足上げが低くなってしまい摺り足に見えるわもうすこし周期下げて足上げ演出入れたい
あとやっぱ足滑るからブレード細くして圧力上げますか pic.twitter.com/ksYMq4eRjQ— HomeMadeGarbage (@H0meMadeGarbage) March 20, 2025
振り子ウェイトシフト検知だと歩行周期短くて足上げが低くなってしまい摺り足に見える。。。
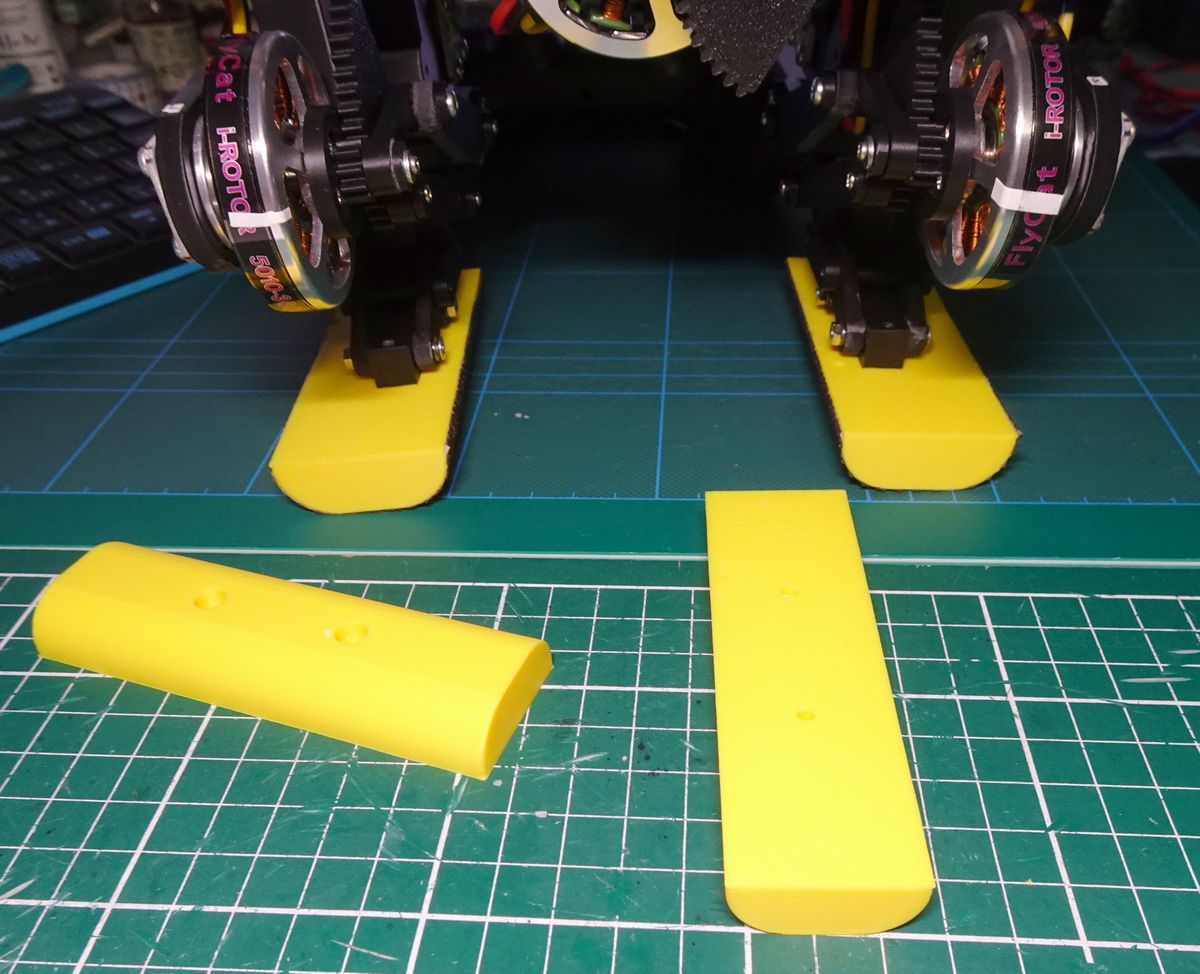
足修正2
動作が高速になってきたこともあり、足底の滑りも大きくなってきました。
そこで足底のブレード幅を細くして圧力を増して滑り低減をはかってみました。
更にロール軸のモータコントローラMKS ESP32 FOCを旧バージョンのV1.0から V2.0に変更しました。
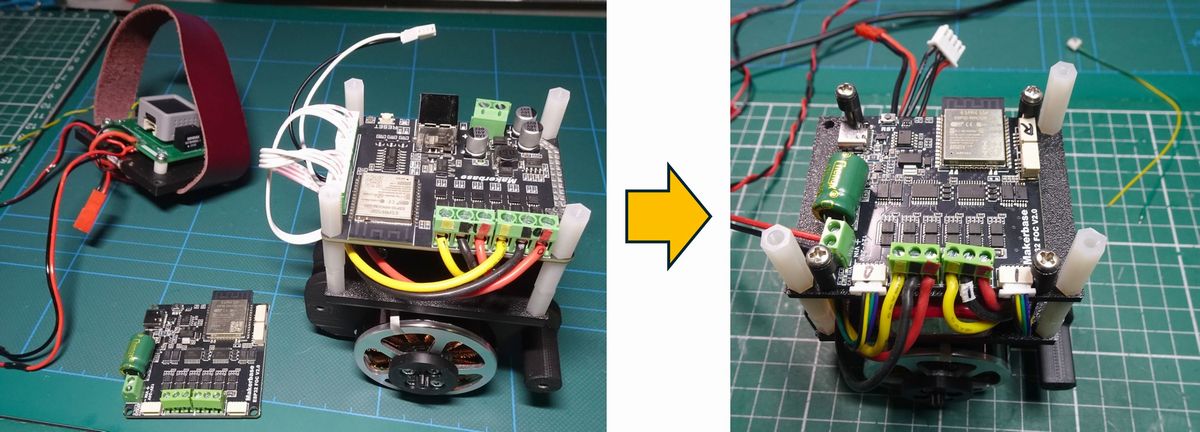
V1.0とV2.0でプリドライバやパワトラに変更はないので駆動電流能力などは変わらないのですが、電源周りのパスコンなどのケアや外部通信用のコネクタ実装などがなされておりV2.0の方が使いやすいです。
ちょうど取り寄せていたのが届いたのでこのタイミングで交換した。

足踏み検討2
もう一度足踏みから考え直します。
善し悪し見失って発散しそうなので
一旦足上げから戻って再検証 pic.twitter.com/W0OxrNWZ7R— HomeMadeGarbage (@H0meMadeGarbage) March 21, 2025
足を上げてから接地して、他方の足を上げるタイミングがキモだと考えています。
振り子ウェイトシフトでは歩行時に足上げ高さを確保できなかったので、サーボモータの時と同様に足接地後の振動安定検出で足踏み
IMUの角速度で接地後安定検知して左右切換
ちょっと攻めれてないけど足上げ演出は確保したいので
とりあえずこんなもんかなIMUで足接地後のウエイトシフト具合のジャッジはちょっと難しい。。
モータのトルクで判定できると思うのでCAN通信確立後に再トライしたい pic.twitter.com/YqolLxxZtH— HomeMadeGarbage (@H0meMadeGarbage) March 21, 2025
動作周期はガクンと落ちますが足は上がっております。
歩行検討2
接地後振動安定検出で歩行
なんか違うわ pic.twitter.com/yj5TVtc8ho
— HomeMadeGarbage (@H0meMadeGarbage) March 22, 2025
まぁ足は上がってるよ
でもこれさぁ。。。。
前回 ロール軸にブラシレスモータ導入して味見で歩かせたときの手法に戻っただけじゃん!!
おー歩いた歩いた! かなり静音プリウスかよ
ロール軸の応答かなりいい感じ
着地時の振動も小さいし(ここはPD制御でもっと詰めれる)最適化して振り子のようにスタスタ歩けるようになりたいね。 pic.twitter.com/JBOLFgLZTk
— HomeMadeGarbage (@H0meMadeGarbage) March 16, 2025
↑前回の最終結果
そりゃそうだよね。結局足接地後の振動安定検出による足部に戻ってんだから
おわりに
今回はいろいろグダグダやったけど結局進捗はゼロでした。。。
無理やり成果を絞り出すとすれば、ウェイトシフトをIMUセンサで完ぺきに判断するのがかなり難しいことがわかったぐらいでしょうか。
足モータの負荷電流からトルク変化検知してウエイトシフト検知するのが確実でしょうか。
現状足やロール軸のモータコントローラと中枢コントローラATOM Matrixとの間の通信はUARTとなっており、トルク情報までやり取りとなるとちょっと厳しいです。
やはりCANなどのバス通信の検討が必要そうです。
少なくとも根本改善なしでは一生進捗が出なさそうだわ。。。
ということでまた次回があれば お会いいたしましょう。