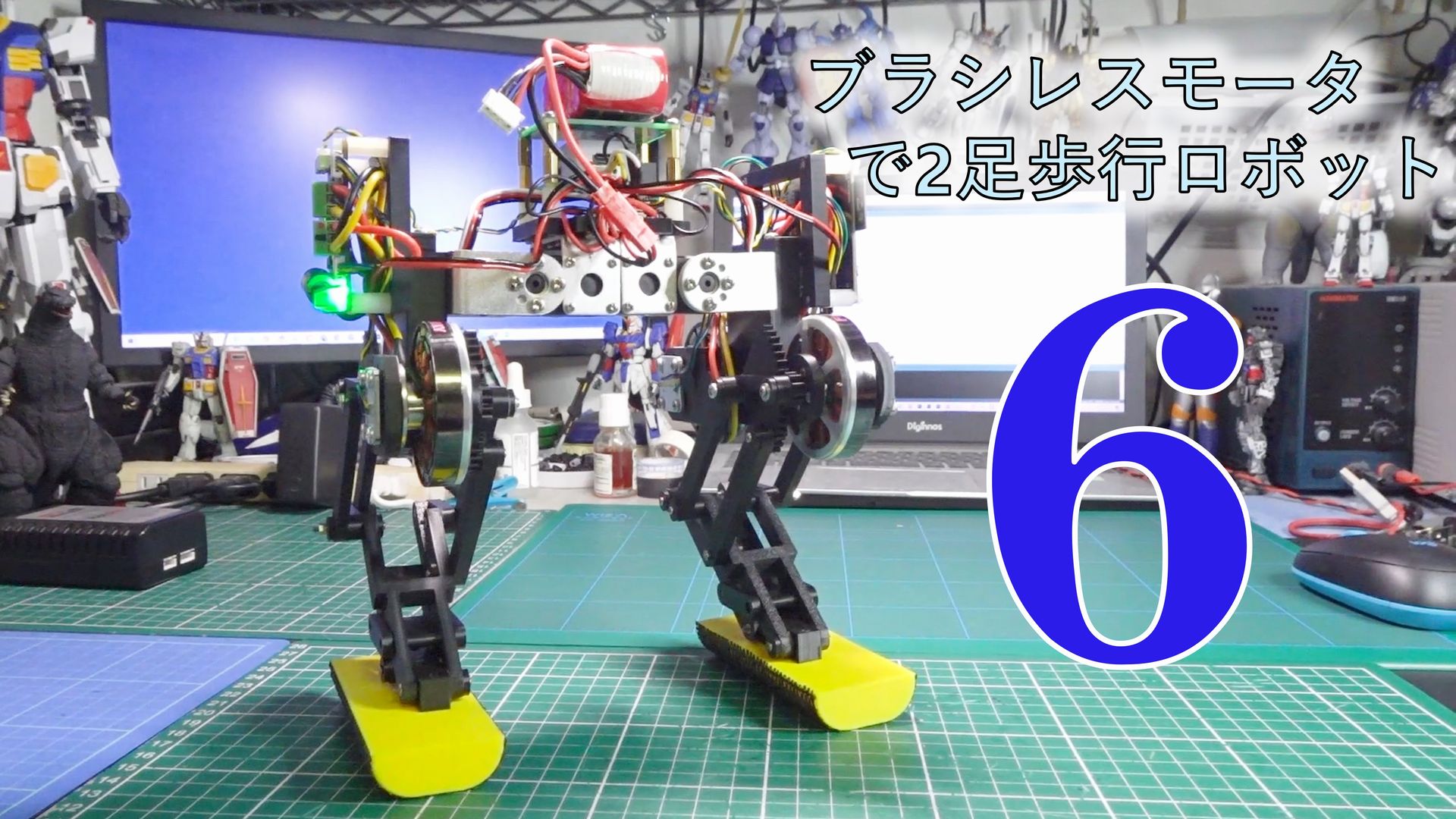
ブラシレスモータで2足歩行ロボット6 ー 足上げ歩行動作 ー
本記事にはアフィリエイト広告が含まれます。
前回は2足歩行ロボット検討を再開してロール軸追加の3自由度ロボットを製作しました。
基本動作を確認してなんとか歩行もできました。
次は足裏かまぼこリベンジだな pic.twitter.com/R3XDXNMeS4
— HomeMadeGarbage (@H0meMadeGarbage) March 10, 2025
しかし、せっかくロール軸サーボも追加したので、上の動画のようなスリ足ではなくしっかり足上げをした歩行を目指したいです。
☟こんな感じの歩行が目標
目標が高すぎますが、いろいろもがきつつ検討しましたので報告いたします。

目次
足踏みブラッシュアップ
しっかりとした足上げを実現するべく、足底をかまぼこ状にしました。
足底をかまぼこにした。
よく揺れるので体幹維持ロール軸サーボも効果的に動いている。さらに足上げからの下げるタイミングを姿勢角速度の符号反転で自動化しているので揺らいで少し生物感が出た
実に調子がいい pic.twitter.com/bw2aqmYJ42
— HomeMadeGarbage (@H0meMadeGarbage) March 11, 2025
しっかり足上げした足踏みが実現できました。
上の動画ではさらに足を蹴り上げてから降ろすタイミングを姿勢角速度の符号反転で自動化しています。
じつにスマート!
歩行ブラッシュアップ
足の移動を始点終点指定のリニア駆動ではなくエレガントな正弦波駆動にして歩行動作を確認しました。
足運びを野蛮な始点終点指定のリニア駆動ではなく
エレガントな正弦波駆動に
歩行についてはもっと大胆にウェイトシフトしてもいいかも
要検討 pic.twitter.com/iCRZEl87o7— HomeMadeGarbage (@H0meMadeGarbage) March 11, 2025
後進。逆関節も可愛くていいな
逆関節の方がかわいいか
そろそろバッテリにしないと配線ジャマ pic.twitter.com/aVaTfxRCYW— HomeMadeGarbage (@H0meMadeGarbage) March 11, 2025
足移動を正弦波状にして動き始めと停止もしくは方向転換時の加速度を0にして遷移をマイルドにしています。
安定化電源からの給電で配線が流石にジャマになってきたので
バッテリ駆動に
最後はギア折れ
どうにかしないと pic.twitter.com/v2dEgrmyFp— HomeMadeGarbage (@H0meMadeGarbage) March 11, 2025
配線がなくなり若干足も上げやすくなりました。
最後はブラシレスモータの歯車が壊れて転倒。。。
ギア破損
歩行検討に際してブラシレスモータの歯車が先ほどのように頻繁に壊れるようになってしまいました。
ブラシレスモータの歯車は固定ネジ位置の兼ね合いで2パーツ構成にしています。
土台の歯車差し込み十字基部が折れてしまうのです。。
一旦、以下のようにギアを土台に少し埋め込むようにして強度を増しときました。
根本解決ではないけれど コレで様子をみます。
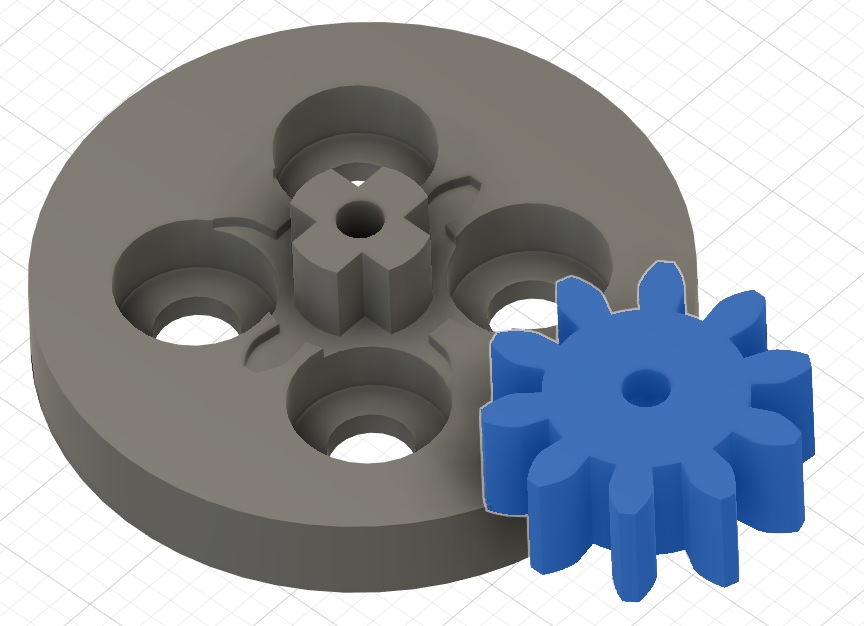
↑今のところコレにしてからは破損はありません。
足強化
もう一点、足底の遊びが多くカタカタしています。
下肢のスネ部分に添え板を追加して強化!
添え木追加して足強化 pic.twitter.com/6Z1AMt2Joz
— HomeMadeGarbage (@H0meMadeGarbage) March 12, 2025
足移動再検討
足の上下前後の移動を正弦波状にしていましたが、前後移動のみ線形移動にしてみました。
歩行時の足前後移動は正弦波形で加速度制御するのではなくリニアに動かした方が味がいいのか
奥深いね pic.twitter.com/C5nFHH0ZpV
— HomeMadeGarbage (@H0meMadeGarbage) March 13, 2025
なんだかいい感じになった気がします。
重たい機体を前進(もしくは後進)させる際に進行方向に加速度を足で無理にコントロールするのではなく一定に進ませる方が良いのでしょうね。あくまでこの機体の場合はでしょうが。
あとここで足先を目視しやすいように黄色フィラメントで3Dプリンタ出力してみました。
更に足上げのための蹴り上げを下方向から推進方向に対して斜め後ろ方向に変更しました。
足上げのための蹴り上げを下方向から斜め後ろ方向に変更
推進力を帯びた足上げ実現いちいち頭で考えるより様々な条件加味して機械に総当たりで考えさせて最適なのを選択する昨今の手法の正しさを実感する。
でも俺は昭和の漢だから
プログラマーなんかに負けたくない pic.twitter.com/fAxP6P8DK2— HomeMadeGarbage (@H0meMadeGarbage) March 13, 2025
足上げ動作に推進力が増し、高さも安定するようになりました。
歩行調整
各種修正を経て歩行動作を再調整し以下のようにしっかりとした足上げ歩行ができるようになりました。
この時点でロール軸サーボの応答が歩行動作のクリティカルパスになってきました。
ちょっと大げさに足上げしているためウェイトシフト量が大きいせいもありますがね。
ここで左右の足動作を切り替える歩行周期は時間指定しており一定動作となりますが、この周期を短くすると以下のようにロール軸サーボによるウェイトシフトが追従できず接地足にうまく重心が乗らず まともに歩けなくなります。回っとるわ。。
歩行周期を短くするとロール軸サーボによるウェイトシフトが追従できず接地足にうまく重心かからなくてまともに歩けなくなる。回っとるわ。。
左右の足上げ切換も姿勢角で自動化したい pic.twitter.com/3slGNQkIOf
— HomeMadeGarbage (@H0meMadeGarbage) March 13, 2025
おわりに
ここでは片足3自由度の2足歩行ロボットの足上げ歩行動作について検討しました。
だいぶ良い感じになってきたと思っております。
☟現状こんな感じ
冒頭の本家のドロイドと詳細比較しないでくださいね 🙄 。
まだまだ検討すべきことは多くございます。
最適な足上げ量の検討だったり、左右の足上げ切換の姿勢角による自動化などなど。。。
またロール軸に普通のサーボモータを採用しておりますので、当初予想していた通り応答速度に不満が出てきています。
やっぱロール軸もブラシレスモータかなぁ
検討を進めることによってロール軸にブラシレスモータを採用するモチベーションが生まれるのでしょうか?
それは また 別の お話 (森本レオ)
追記
左右の足上げ切換自動化 (2025/3/14)
左右足動作の切り替えをタイミング時間指定からIMU角速度による姿勢安定検知でトリガにして自動化しました。
左右足動作の切り替えを角速度で姿勢安定検知でトリガ
特に何も面白くない結果となった pic.twitter.com/p5qwX2E6PS— HomeMadeGarbage (@H0meMadeGarbage) March 14, 2025
片足の動作が終了して、機体の安定を角速度で検知してから他方の足を動かしています。
まぁ 片方ずつきちんと動かして歩行しているね という結果です。。
これで本ロボットは足を蹴り上げてから地面に接地させるタイミングと接地後に他方を動かし始めるタイミングが自動化されました。
姿勢安定検知のしきい値をガバガバにして切り替え速度を上げてもロール軸サーボのウェイトシフト動作が追従できずうまく歩けませんでした。。
足上げ高さを低くしてウェイトシフト量を減らし歩行周期を上げてもみましたが、スリ足歩行となり全然面白くなかった。。
ということでロール軸をブラシレスモータで検討したいと思います!
ちょっと現時点ではどうなるかわかりませんが、引き続きよろしくお願いいたします。