
Atomic Motion Base つかってみた
本記事にはアフィリエイト広告が含まれます。
最近は様々な機体構成やモータで車輪倒立振子を作りまくっております。
根本的な制御方式は変えてないので、どんな構成にも対応できるメソッドが確立できたと考え、前回は簡素なモータを用いてメソッドの検証をしました。
みごとDCモータや連続回転サーボでも倒立動作が確認できたので”俺のメソッド”にさらに自信を持つことができました。
是非”俺のメソッド”をまとめて書籍化したいのですが、それには機体が重要となります。高価だったり複雑な構成ですと楽しんでいただけません。
簡素で入手性・汎用性の高い構成で紹介する必要があります。

目次
Atomic Motion Base
凄くいいものを見つけました!
Atomic Motion Base はバッテリ搭載でサーボ (4ch) とDCモータ (2ch)を駆動できるATOMシリーズ用のユニットです。
このユニットを用いれば以下のように色々な構成で車輪倒立振子を楽しむことができ、メソッドを存分に堪能していただけると考えたのです。
- 連続回転サーボによる車輪倒立振子
- DCモータによる車輪倒立振子
- サーボモータで足を構成してDCモータでホイール駆動する脚付き倒立振子
参考
連続回転サーボによる倒立振子
早速、Atomic Motion Base を用いて倒立振子を作ります。
コントローラにはATOM Matrixを採用
あらいいですねぇ pic.twitter.com/vun6DYnyPP
— HomeMadeGarbage (@H0meMadeGarbage) May 2, 2026
Atomic Motion Base のサーボチャンネルで連続回転サーボ FS90R を駆動します。
できた!
あらあらいいですねぇ pic.twitter.com/bpxNilJJKE
— HomeMadeGarbage (@H0meMadeGarbage) May 2, 2026
サーボは両面テープでつけただけ
ATOM Matrix内蔵のIMU (MPU6886) と Atomic Motion Base の制御が同一I2Cポートとなるので動作に心配はあったのですが全く問題ありませんでした。
これでDCモータまで精度良く回せたら罰が当たるかもわからない pic.twitter.com/Tkj29mNiAf
— HomeMadeGarbage (@H0meMadeGarbage) May 5, 2026
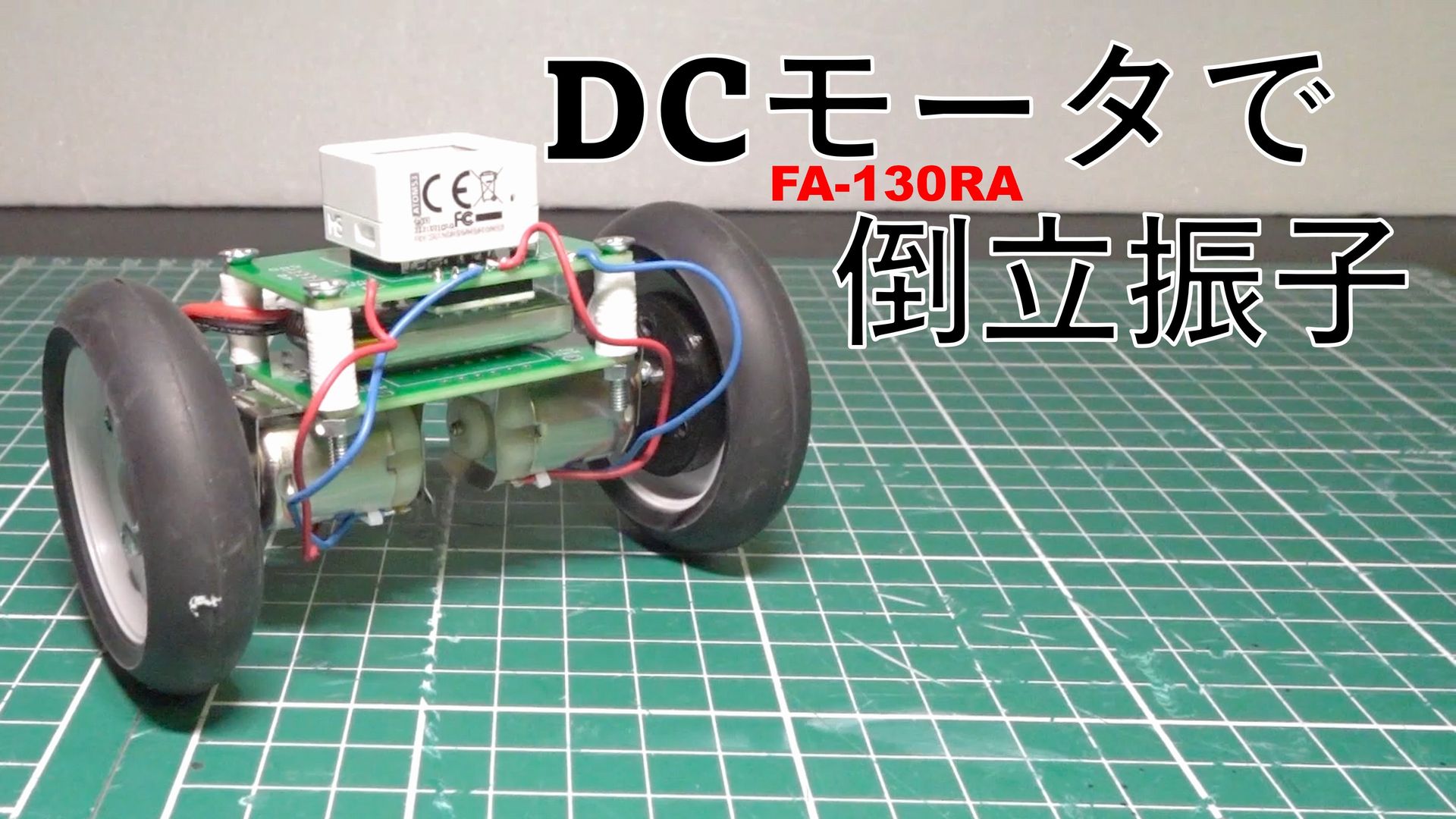
DCモータによる倒立振子
Atomic Motion Base のDCモータチャンネルで FA-130RA を駆動して倒立振子を製作します。
できたけど。。。
モータ駆動うまくいかない pic.twitter.com/QAyx5yiOeL
— HomeMadeGarbage (@H0meMadeGarbage) May 3, 2026
なんか動作おかしい。。。正転と逆転でトルクが違う気がする。。。
パルス出力観測
原因を探るべくまずはロジックを疑いモータの出力チャンネルを観測しました。
モータドライバの動作は問題ないわ pic.twitter.com/FEso77q869
— HomeMadeGarbage (@H0meMadeGarbage) May 3, 2026
setMotorSpeed(ch, speed) 関数で、speed:-127~+127 の出力をみましたが全く問題ありませんでした。
正常なPWMパルスが出力されています (負荷 1kohm)。
I2C
ATOM Matrix内蔵のIMU (MPU6886) と Atomic Motion Base の制御が同一I2Cポートであることで不具合が出てる可能性もあるので、
IMUを外付けにしてI2Cポートを分けてみました。
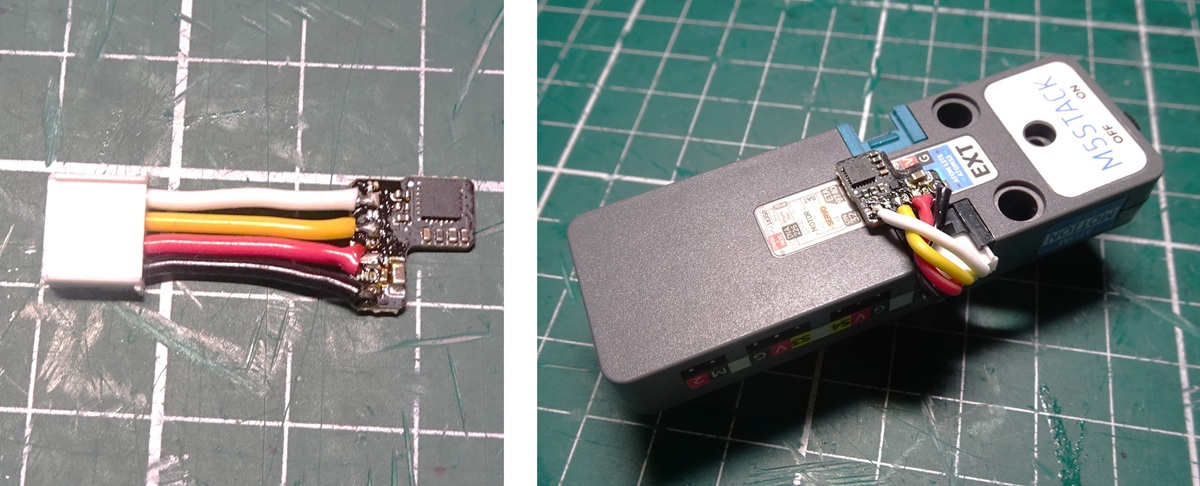
IMUはATOMS3内蔵のMPU6886基板を取り出したもの。
I2Cポート分けても全く改善無し。全然ダメでした。。。
ATOM MotionとIMUが同じI2Cポートなのが悪さしてるかもと思い
IMUを外付けにしてI2C分けて実験やはり正転/逆転でトルクが違う
クソが pic.twitter.com/aedRPbndIk— HomeMadeGarbage (@H0meMadeGarbage) May 4, 2026
一方方向は問題ないが他方の回転トルクが全然ないの
一方方向は問題ない
他方のトルクがほぼないの pic.twitter.com/f00XRQrg5c— HomeMadeGarbage (@H0meMadeGarbage) May 4, 2026
I2Cは関係ないようです。
なんでや
家の個体の症状としては以下の通り
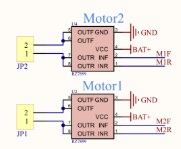
setMotorSpeed(ch, speed)
M1 +speed:トルク強い、-speed:トルク弱い
M2 +speed:トルク弱い、-speed:トルク強い
上記実験の通り、おそらくロジックや通信に問題はないと思われる。たぶん
となるとモータドライバ RZ7899 のオフセットやパワトラRonのばらつきか??
ちょっと原因不明
Atomic Motion Base でDCモータによる倒立振子は実現できませんでした。
おわりに
ここではAtomic Motion Base を用いて車輪倒立振子動作の検証を実施しました。
残念ながらDCモータ駆動チャンネルの正転/逆転でのトルク差が大きく、
DCモータによる倒立振子は実現できませんでした。
引き続き、多くの人々に楽しんでもらえる最適な機体の検証を進めていきたいと思います。
脚付き倒立振子 (2026/5/8 追記)
DCモータがうまく駆動できないのですが、Atomic Motion Base のサーボポートで足を駆動する脚付き倒立振子を試してみたいので考えてみました。
SCS0009
ホイール駆動にシリアルサーボ SCS0009 を採用してみたいと思います。
あまり知られてないのですがSCS0009 には連続回転モードがございます。
SCS0009 の連続回転モードは Address 9(Min Position Limit)と Address 11(Max Position Limit)を両方 0 にすることで設定され、回転速度は Time parameter で指定します。
ユーティリティソフトでAddress 9、Address 11を0に設定
![]()
マイコンから直でSCS0009 の連続回転モードを堪能
SCS0009 の連続回転をマイコン直で楽しむ
受信なしの送信のみ pic.twitter.com/LGafnW07J8? HomeMadeGarbage (@H0meMadeGarbage) May 6, 2026
コチラの記事の角度指定コードを Time parameterを設定するように改造してSCS0009 の連続回転モードを楽しめるようにしました。

送信のみで受信はできませんが半2重通信回路なしで手軽に駆動できます。
脚付き倒立振子製作
先ほど検証したように Atomic Motion Base の4ピンポートから直で SCS0009 を連続回転制御してホイールとします。
ちょっと速度不足気味ですが倒立動作は確認できました。
SCS0009 で倒立振子
まぁ100点じゃないけど音が面白いから良し pic.twitter.com/w3COHqALwb— HomeMadeGarbage (@H0meMadeGarbage) May 6, 2026
足はAtomic Motion Base の4つのサーボポートから駆動します。
うごめいとる pic.twitter.com/5yoHrfJhlF
— HomeMadeGarbage (@H0meMadeGarbage) May 7, 2026
サーボは PTK 7465 MG を採用。すごくスムーズに動いとる

さすがに苦しいが何とか倒立
さすがにキツイか pic.twitter.com/54wgCoc1nB
— HomeMadeGarbage (@H0meMadeGarbage) May 7, 2026
足位置を前後シフトさせてのバランス動作はホイールの応答が追い付かず実現できませんでした。
脚付き倒立振子の足位置前後バランスをやりたかったんだけど
ホイールが遅くてダメだわ pic.twitter.com/0rmwis5UJx— HomeMadeGarbage (@H0meMadeGarbage) May 7, 2026
所感
ちょっと SCS0009 で脚付き倒立振子は無茶でしたが、 Atomic Motion Base による4つのサーボ制御による足駆動は問題なくスムーズに実現できました。
マジでDCモータ駆動がうまくいかないことが悔やまれるわ





書籍!
絶対買います!
楽しみにしています☆
ありがとうございます!
書籍と言いましてもPDFデータになると思いますが
何卒宜しくお願い致します。
Atomic Motion Base のサーボチャンネルで連続回転サーボ FS90R を駆動すごいですね。
プログラムが見たいです。
書籍化されるとそれが可能になるのでしょうか?
自分で作ってみたいです。
よろしくお願いいたします。
いろんなモータや機構で使える制御手法だと思っておりますので
最適な機体を決めて製作レシピ化したいと考えています。
宜しくお願い致します。