俺の倒立メソッドを他のモータでも
本記事にはアフィリエイト広告が含まれます。
ここ最近は車輪倒立振子作りまくってるんですよ。
そりゃあもう狂ったように
ブラシレスモータやQDDなど各種モータで製作を楽しみました。
直近ではシリアルサーボ XL330 で倒立振子をつくりました。
シリアルサーボで倒立振子 pic.twitter.com/u2HSfDVwRd
— HomeMadeGarbage (@H0meMadeGarbage) April 9, 2026
こんだけ作ってると確立しちゃうのよ
メソッドが
どんなモータでも倒立させれる自信がついちゃってるわけよ。
てことでここではDCモータと連続回転マイクロサーボでメソッドを試してみました。

目次
DCモータ
DCモータでの車輪倒立振子は過去にも何種か作っております。
ここ最近で磨きをかけたメソッドをDCモータ版にも適応していきましょう。
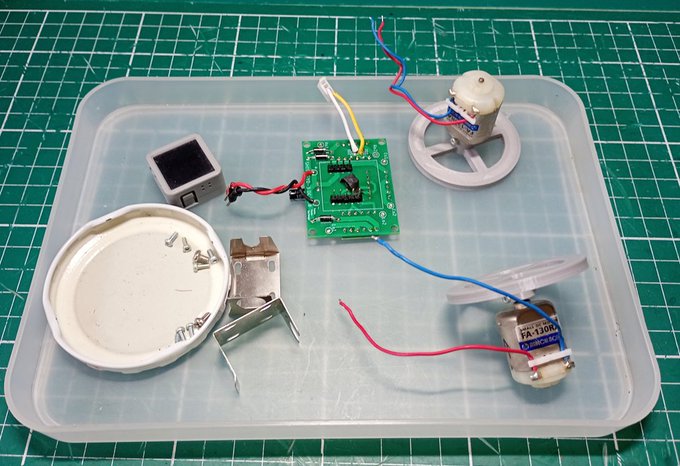
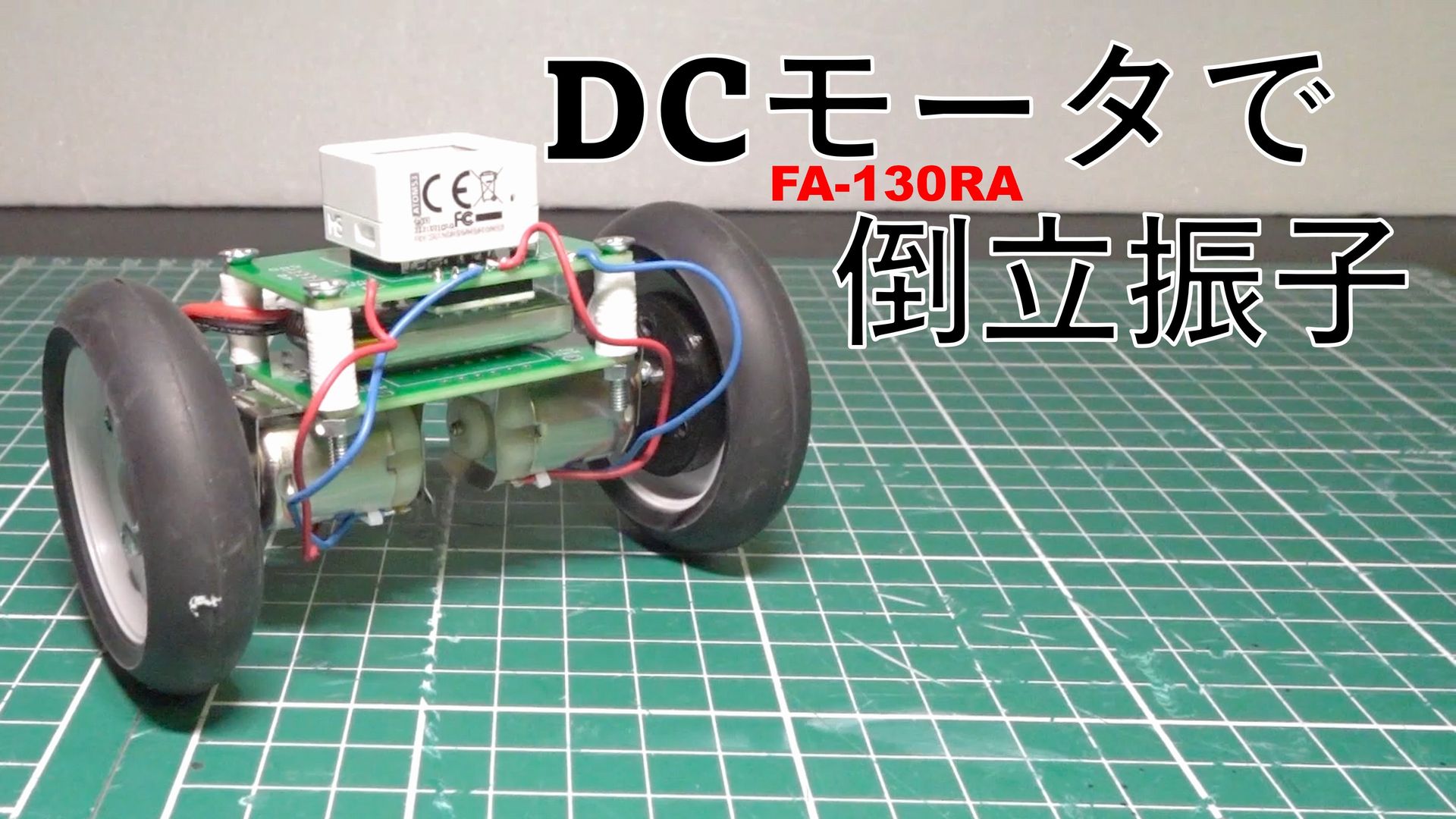
ミニ四駆でおなじみの FA-130RA を使用します。
基板は素晴らしい以下を使用
動作
メソッド適応
FA‐130RAで倒立振子 pic.twitter.com/2b31GClsdv
— HomeMadeGarbage (@H0meMadeGarbage) April 22, 2026
メソッドでは機体傾斜と傾斜角速度とホイール回転速度をフィードバックして制御します。
ここではホイール回転速度をエンコーダなしで印可電圧から推定しています。
若干ガバガバな回転速度検知となっているので、停止時にはフラフラはしてしまいます。
しかしメソッドによって走行はスイスイできております。
FA-130RA で倒立振子
回転速度はエンコーダなしのガバガバ推定のためビタ止まりは無理だけど
こんだけ動いたらカワイイ pic.twitter.com/SqIE5LxKS0— HomeMadeGarbage (@H0meMadeGarbage) April 22, 2026
ここでは走行はPS4コントローラで操作しています。
360度連続回転マイクロサーボ
次に360度連続回転マイクロサーボにメソッドを適応してみます。
Feetech 社の FS90Rを使用
コントローラはバッテリ内蔵の M5StickC Plus (v1.1) を採用し、基板は素晴らしい以下のものを使用しました。
動作
360度連続回転マイクロサーボによる倒立振子製作は初めてなので緊張します。
360度連続回転マイクロサーボ FS90R で倒立振子
一応制御で来たけど こんなプルプルするもんかね?
オフセット調整難しいな。。
そういえばESP32のGPIOでサーボ駆動ってほとんどやってなかったな 研究が必要だわ。
50Hzで音鳴りしてるし pic.twitter.com/WfP0ALAfpi— HomeMadeGarbage (@H0meMadeGarbage) April 23, 2026
DCモータよりさらにフラフラですが、なんとか走行できております。
メソッドによりFS90Rでもそれなりに車輪倒立振子の走行制御を楽しむことができました。
ヨッボヨボ。。 pic.twitter.com/kU39hrhUDe
— HomeMadeGarbage (@H0meMadeGarbage) April 23, 2026
サーボの使用により構成がかなり簡単になりましたが、応答がやっぱキツイな
あと50Hzの制御信号で音鳴りするんだけど。。。
ESP32ってこんな音なるっけ???
そういえば ESP32のGPIOでサーボ駆動ってほとんどやってこなかったので まだ研究が必要だわ。
追記 (2026/4/27)
異常にプルプルしてたのはサーボを新品に換えることで治りました。
大昔に買ったものだからガタがきていたようです。
連続回転マイクロサーボ FS90R で倒立振子
なかなかに遊べるじゃない pic.twitter.com/IAl3y9krGf— HomeMadeGarbage (@H0meMadeGarbage) April 27, 2026
なかなか遊べる代物となりました♪
50Hz信号による音鳴りはESP32のDev.ボードでは起きないからM5StickC特有の問題かもしれない。
ちょっと耳障りな音でイヤね
メソッド
ここ最近でまとまりつつある車輪倒立振子のメソッドはザックリこんな感じ。
以下をフィードバック
・機体傾斜角
・機体傾斜角速度
・ホイール回転速度
更に姿勢平行補償 (姿勢ピッチ角)として以下実施
・足ありの場合は足前後シフト
・足なしの場合は目標姿勢角シフト
走行制御
・前後走行はホイール回転速度フィードバック目標値として制御
・旋回は Yaw軸の角速度のP制御でモータ駆動
ベストな構成の機体と共にいつかレシピを完成させたい
“俺の倒立メソッド”
おわりに
ここでは最近の車輪倒立振子製作の一環として
手軽なDCモータと連続回転マイクロサーボを採用した機体の検証を実施しました。
いずれも簡素な構成の倒立振子となりましたが、メソッドにより倒立走行を楽しむことができました。
研究をすすめて、機体とメソッドに磨きをかけていつか発表したいと思います。
是非に応援していただきたく何卒宜しくお願い致します。