サーボモータでジャンプに挑戦3
本記事にはアフィリエイト広告が含まれます。
以前、シリアルサーボ STS3032 で構成した足によるジャンプ動作の確認を行いました。
ここで、屈伸型の倒立振子でジャンプする際にはホイール用のモータの軽量化も必要そうであることがわかりました。
前回は軽量のギアドモータでの倒立振子を試しましたが、手持ちのモータのトルクがマッチせずにうまくいきませんでした。
そこでここでは軽量のわりにトルク十分で屈伸用にも用いたシリアルサーボ STS3032 をホイール用のモータとして実験を進めます。
STS3032による倒立振子動作は以前に確認済みです。
目次
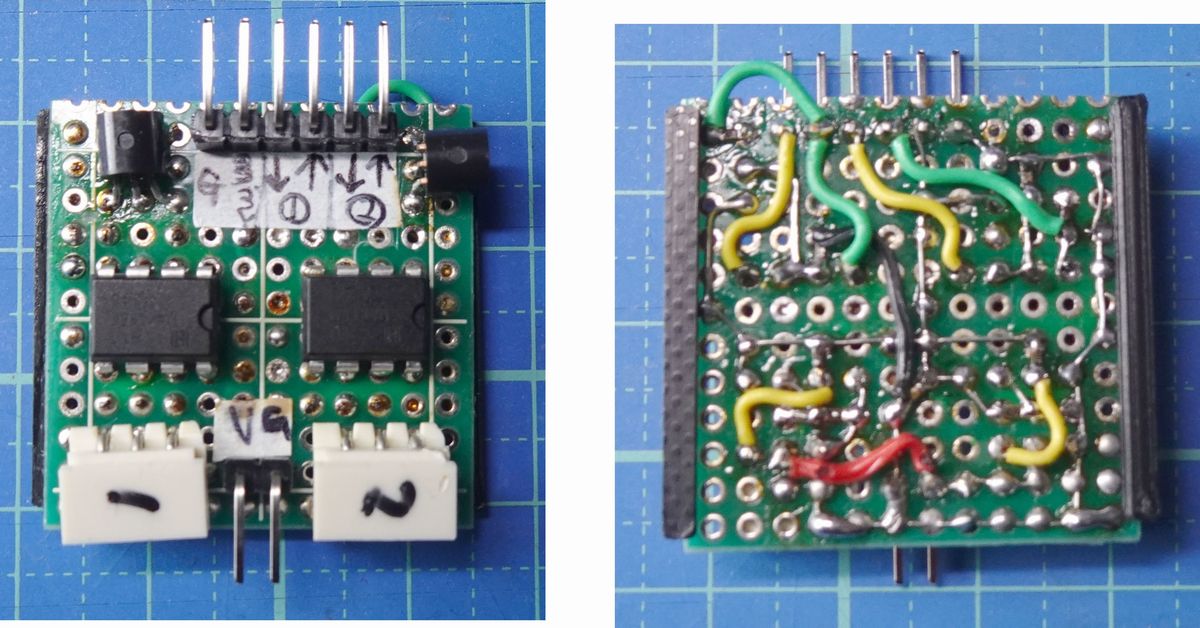
サーボ用インターフェース基板
屈伸用とホイール用にSTS3032を使用することになりますので、制御基板には以前製作した2系統の信号を入出力できる以下の基板を使用しました。
屈伸動作
制御基板で屈伸動作確認
良い動きですね pic.twitter.com/A87qw5Inws
— HomeMadeGarbage (@H0meMadeGarbage) August 10, 2023
サーボモードとモータモードの共存
2系統の基板ですので通常のサーボモードと連続回転のモータモードの共存も可能です。
STS3032
サーボモードとモータモードの共存を確認 pic.twitter.com/HeFKNgFRsn— HomeMadeGarbage (@H0meMadeGarbage) August 11, 2023

筐体作製
サーボ通信用インターフェース基板と制御用のATOMS3、バッテリを搭載して機体を製作しました。
倒立動作を確認しました。
できた#倒立振子 #電子工作 #山の日 pic.twitter.com/zSWKwwu2Y7
— HomeMadeGarbage (@H0meMadeGarbage) August 11, 2023
バッテリは以下を使用。
[amazonjs asin=”B08T61BGF7″ locale=”JP” title=”ハイテック ウィークエンダー Li-Poバッテリー7.4V700mAh(GRIFFIN) WEGF-023″]
屈伸、足踏み動作も確認 (二足歩行ロボットと共に)。
やっぱ屈伸と足踏みに限るよな#Robotics pic.twitter.com/UMjMK3wnpJ
— HomeMadeGarbage (@H0meMadeGarbage) August 11, 2023
移動動作も確認。
若干ホイールの回転スピードが足りてない気がするなぁ。。
STS3032ちょっと回転速度足りないな。。#倒立振子 #電子工作 pic.twitter.com/uV5S5OYiM8
— HomeMadeGarbage (@H0meMadeGarbage) August 11, 2023
ジャンプ動作
見事に浮いたけど、着地後の倒立はできませんでした (まぁ予想通りだが)。
ジャンプ時の制御をどのように処理するかを考察し色々実機で見てみましたが、
ジャンプ中には倒立制動動作は止めて、着地後に改めて制御開始するのが良いようです。
ジャンプ動作中は倒立制動停止が正解っぽいけど
足の伸縮が大きくなると全然立てないそもそもちょっとこのサーボの応答では難しいかもしれない pic.twitter.com/7eeiKIdN0j
— HomeMadeGarbage (@H0meMadeGarbage) August 12, 2023
ただやはりSTS3032のモータモードでは回転速度が足りず応答もよくないので、大きくジャンプしての着地倒立は難しかったです。
おわりに
ここではシリアルサーボ STS3032を用いての屈伸倒立振子を製作し、ジャンプ動作の確認を行いました。
残念ながらジャンプ後の着地は実現できませんでしたが、ジャンプ自体は実現することができ フルサーボによる屈伸倒立振子の実現は非常に面白かったのかなと思っております。
またモータ選定の旅に出ます。探さないでください。。
しかし、あこがれのコレはホイールに何のモータをつこてるんやろな?
The new product from XGO team, the desktop-level dual-wheel robotic foot, boasts impressive power and balance, allowing it to maintain stability and continue moving forward even after jumping. pic.twitter.com/32HQERMOhH
— XGO (@luwu_dynamics) June 19, 2023