サーボモータでジャンプに挑戦2
本記事にはアフィリエイト広告が含まれます。
以前、サーボモータで足を構築してジャンプ動作の確認を実施しました。
ここでは更に検証しましたので報告します。
目次
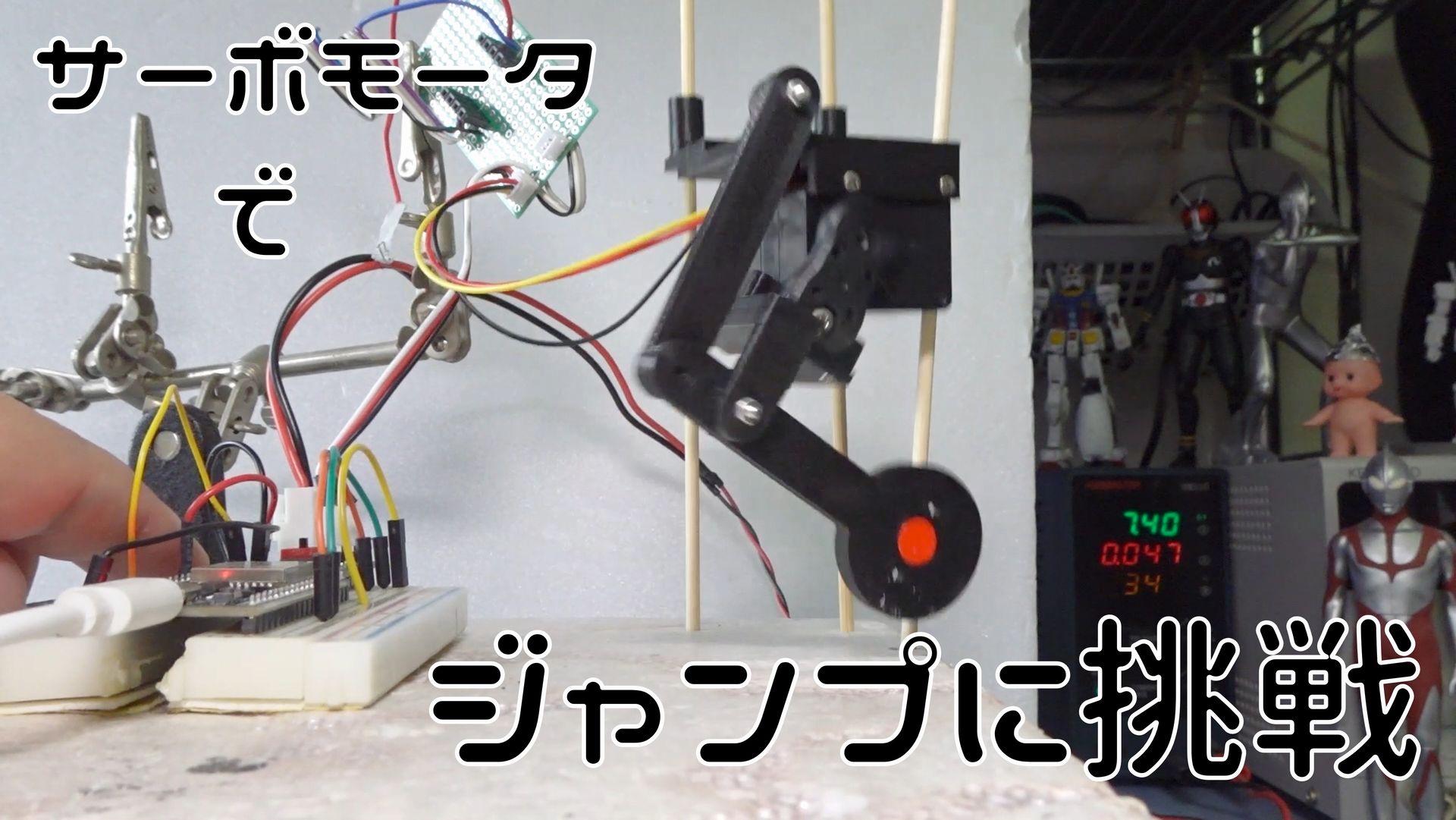
KRS-3301
前回は KRS-3301で1脚ロボットを作製してジャンプ動作を確認しました。
足調整
みてこのリニアな伸縮と跳躍 pic.twitter.com/WSxZTBf1R0— HomeMadeGarbage (@H0meMadeGarbage) July 29, 2023
2足構成
2足構成にしてジャンプ動作を確認します。
元気ね#Robotics pic.twitter.com/u8CDafZGd0
— HomeMadeGarbage (@H0meMadeGarbage) August 4, 2023
結果的にはダメでした。。
あ 全然飛ばないわ pic.twitter.com/dB9tvB1rK7
— HomeMadeGarbage (@H0meMadeGarbage) August 4, 2023
この後モータとタイヤを外して確認しましたが機体が浮くことはありませんでした。
モータが増えて自重が増したためでしょう。

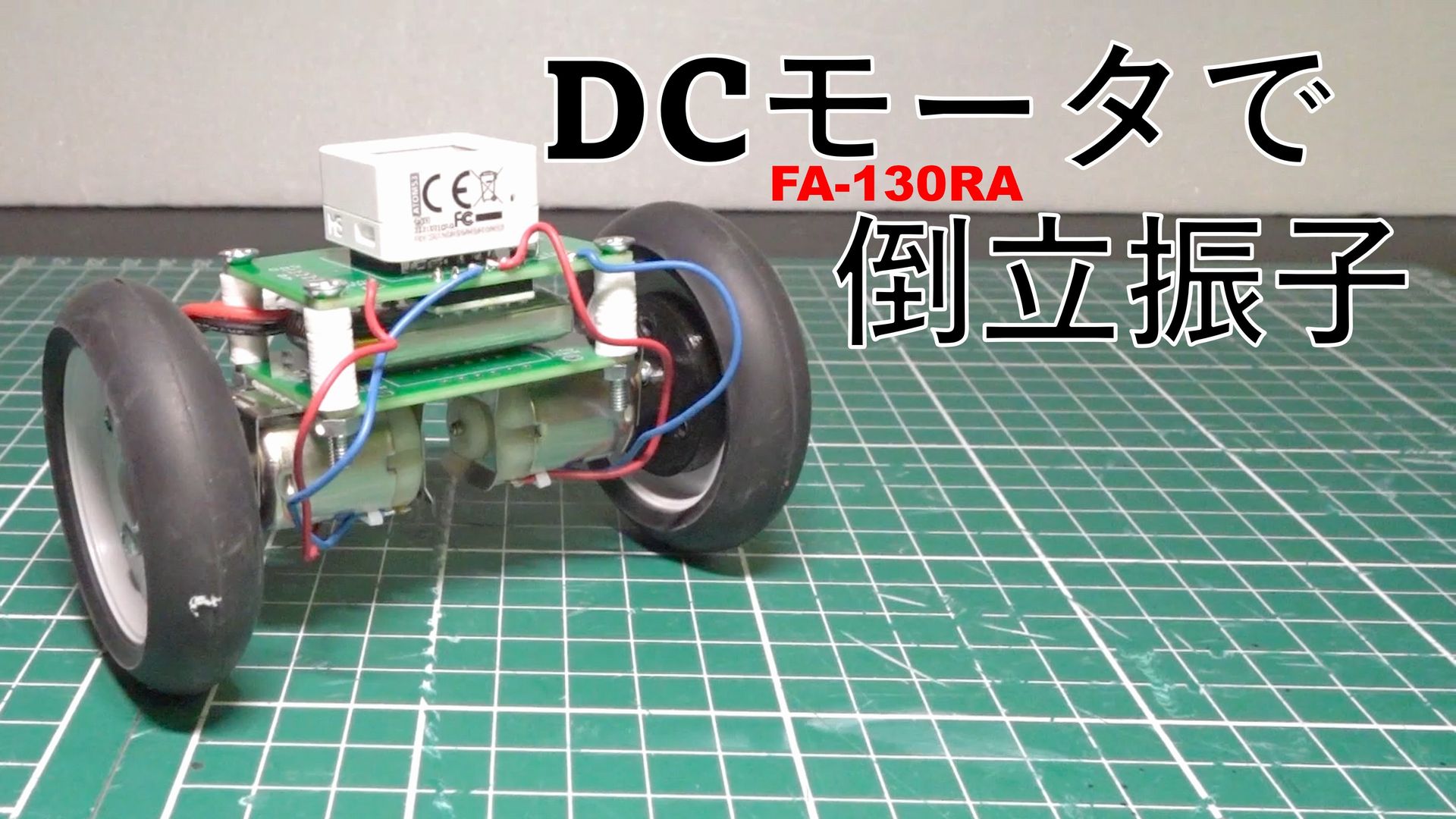
STS3032
そもそもジャンプを実現してみたいと思ったのは、このXGOさんところの倒立振子を見たためでした。
The new product from XGO team, the desktop-level dual-wheel robotic foot, boasts impressive power and balance, allowing it to maintain stability and continue moving forward even after jumping. pic.twitter.com/32HQERMOhH
— XGO (@luwu_dynamics) June 19, 2023
XGOさん曰く、ロボット犬XGO-miniと同じサーボを使用しているとのこと
same as xgo mini
— XGO (@luwu_dynamics) July 25, 2023
もしこれが XGO-Mini2 のことであれば、サーボの仕様は以下のとおり
- 型番:フルメタルバスシリアルサーボ
- 出力トルク:4.5 kg・cm
- 回転速度:0.08 sec/60°
- 動作電圧範囲:4.8V~7.4V
- 角度範囲:360°;
- 重量:20±1g
これってFEETECHのSTS3032じゃね?
ってことで STS3032でジャンプ動作を目指します。

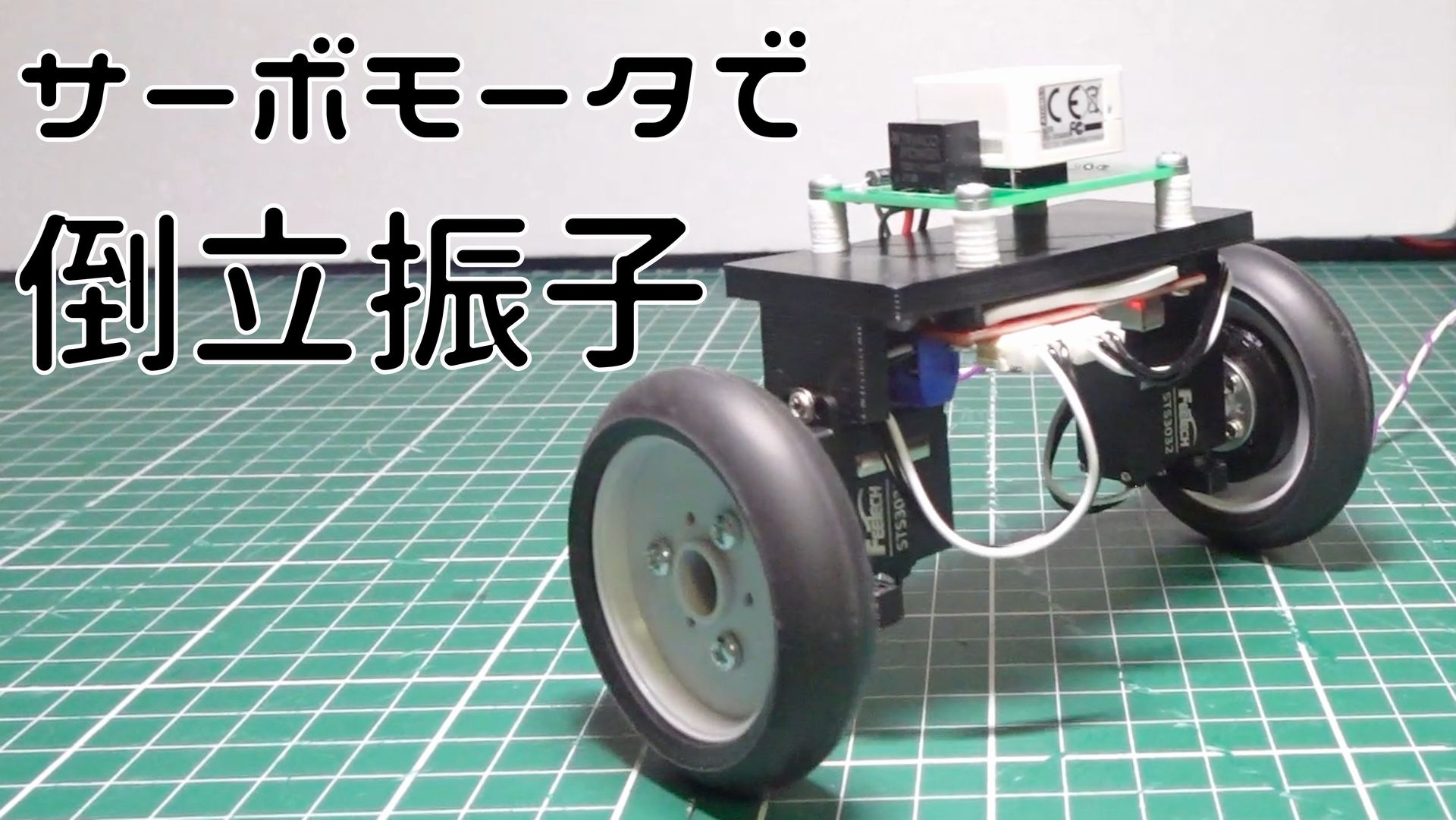
足製作
STS3032向けに足を製作します。
片足できた pic.twitter.com/TYv7TtsGFX
— HomeMadeGarbage (@H0meMadeGarbage) August 5, 2023
うむ いい感じ
両足できた pic.twitter.com/AqvTWbIDLv
— HomeMadeGarbage (@H0meMadeGarbage) August 5, 2023
応答も素晴らしく期待が持てる!
やれんのか? pic.twitter.com/5n5bU9R7nj
— HomeMadeGarbage (@H0meMadeGarbage) August 5, 2023
STS3032でジャンプ実験
なんかいい感じにちょいと機体が浮いてますね。
でもタイヤをつけると全然でした。。。 😥
クソが pic.twitter.com/fpUZUHlDAA
— HomeMadeGarbage (@H0meMadeGarbage) August 5, 2023
もう少し足の引きを速くすることもできそうですが、、、この時点で余裕がないと倒立振子に持ってくのは無理だろうね。
おわりに
ここではサーボモータKRS-3301とSTS3032 で2足ジャンプの検討を実施しました。
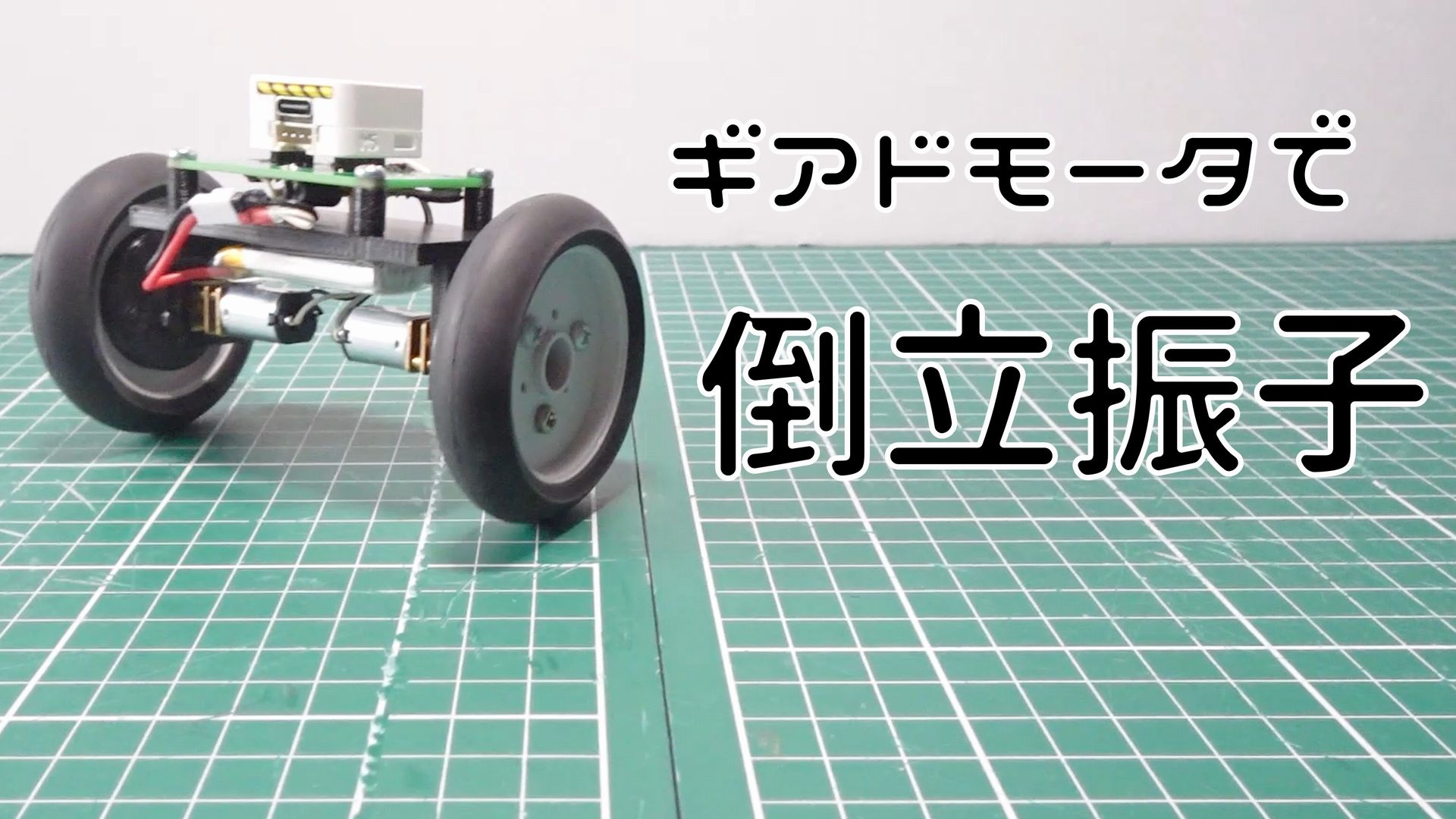
最終的にはホイール用のモータが重く飛べないという結果を得ました。

次はホイール用モータの軽量化の検討も実施してみようと思います。
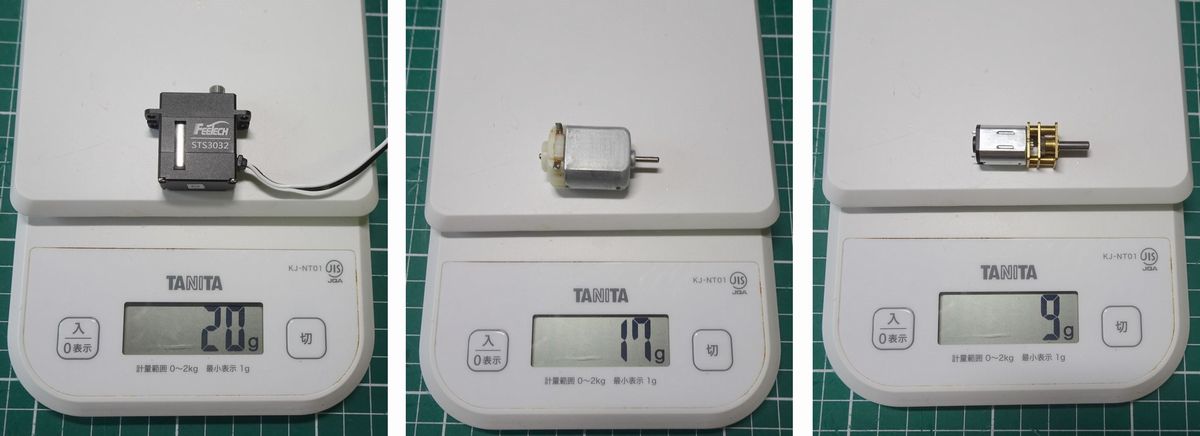
ホイールにもSTS3032 を採用するのも面白いけど、ギアドモータも美味しそうだな。
それではまた
追記
ジャンプ再実験 (2023/8/6)
本記事のジャンプ動画を公開したところ、本体が足に対して軽すぎではというご指摘をいくつかいただきました。
これを受け再実験いたしました。
モータ用のモータはさすがに重いのでここではとりあえずシリアルサーボ SCS0009を用いました。

機体に負荷として電池を載せ、足を引き上げるタイミングも調整して早くしました。
ちょっと飛んだ!!
機体を重くすることで上げて足を縮めると慣性で引き上げられて飛ぶということでしょうね。
これは少し希望が出てきましたかね 🙄