サーボモータでジャンプに挑戦
本記事にはアフィリエイト広告が含まれます。
以前に屈伸タイプの倒立振子を製作しました。
この倒立振子をジャンプさせてみたくなったので検討します。
目次
ジャンプする倒立振子
こんなすごい倒立振子を見つけました。
The new product from XGO team, the desktop-level dual-wheel robotic foot, boasts impressive power and balance, allowing it to maintain stability and continue moving forward even after jumping. pic.twitter.com/32HQERMOhH
— XGO (@luwu_dynamics) June 19, 2023
凄くきれいにジャンプしていて、しかも足の屈伸機構にはサーボモータを使用しているとのことでした。
servo
— XGO (@luwu_dynamics) July 25, 2023
更に情報をくれてAIロボット犬のXGO-Miniに使用しているサーボと同じなんだって
same as xgo mini
— XGO (@luwu_dynamics) July 25, 2023
もしこれが XGO-Mini2 のことであれば、サーボの仕様は以下のとおり
- 型番:フルメタルバスシリアルサーボ
- 出力トルク:4.5 kg・cm
- 回転速度:0.08 sec/60°
- 動作電圧範囲:4.8V~7.4V
- 角度範囲:360°;
- 重量:20±1g
軽くて速度の速いシリアルサーボが使われているようですが、トルクは適度な値のようです。
いい情報を得たので自分でもジャンプを試したくなってきた次第です。
倒立振子でジャンプお試し
以前に製作した屈伸倒立振子でジャンプを試してみました。
進捗ダメです pic.twitter.com/wgHme25Wnd
— HomeMadeGarbage (@H0meMadeGarbage) July 26, 2023
全然ダメですね。。
ちなみにこのサーボはSCS0009 でトルクが2.3 kg.cmと非力だったかもしれません。
サーボ検討
トルク高めのサーボでジャンプ実験にとりかかります。
サーボにはKRS-3301 を選択しました。トルクは6.0kg・cm (7.4V)と十分そうです。
動作を確認。
KRS-3301 の回転スピードは約0.14 sec/60° と若干遅めだが大丈夫だろうか?
まーた なんかしようとしてるわ pic.twitter.com/pzIv3Ixnf8
— HomeMadeGarbage (@H0meMadeGarbage) July 28, 2023
手元にあるサーボでは一番まともな製品なので とりあえずコレで試してみることにしました。
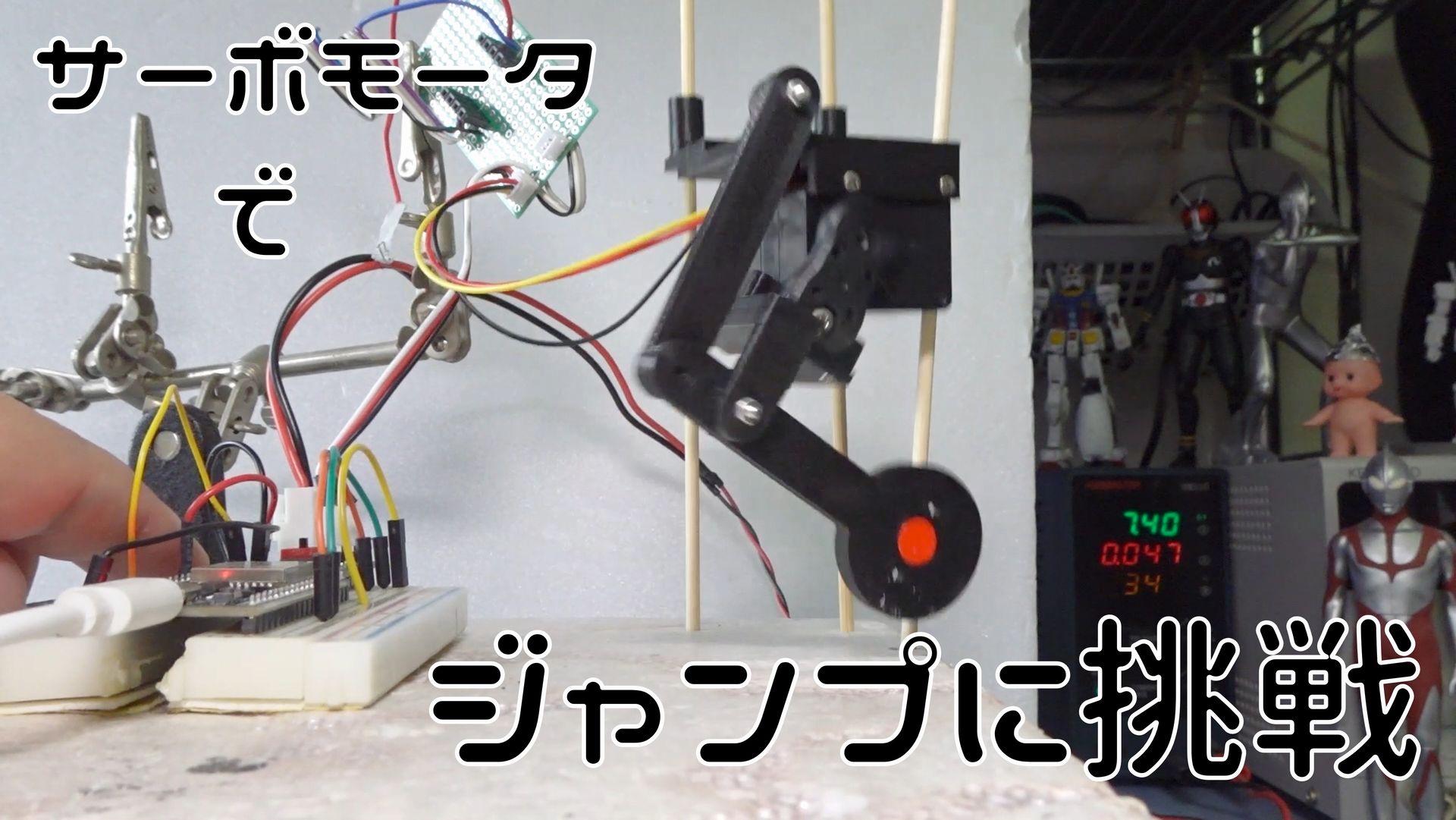
ジャンプ実験
早速 屈伸する足を3Dプリントしました。
ピチピチ pic.twitter.com/bZMiwFkTiG
— HomeMadeGarbage (@H0meMadeGarbage) July 28, 2023
竹ひごなどでガイドをこしらえてジャンプ実験実施
実験環境が貧相で劣で竹ひごだけど
可能性感じる#KRS3301 pic.twitter.com/SD5esAkaR3— HomeMadeGarbage (@H0meMadeGarbage) July 29, 2023
あら!なんかイケそう。
全く可能性がない感じではないようです。
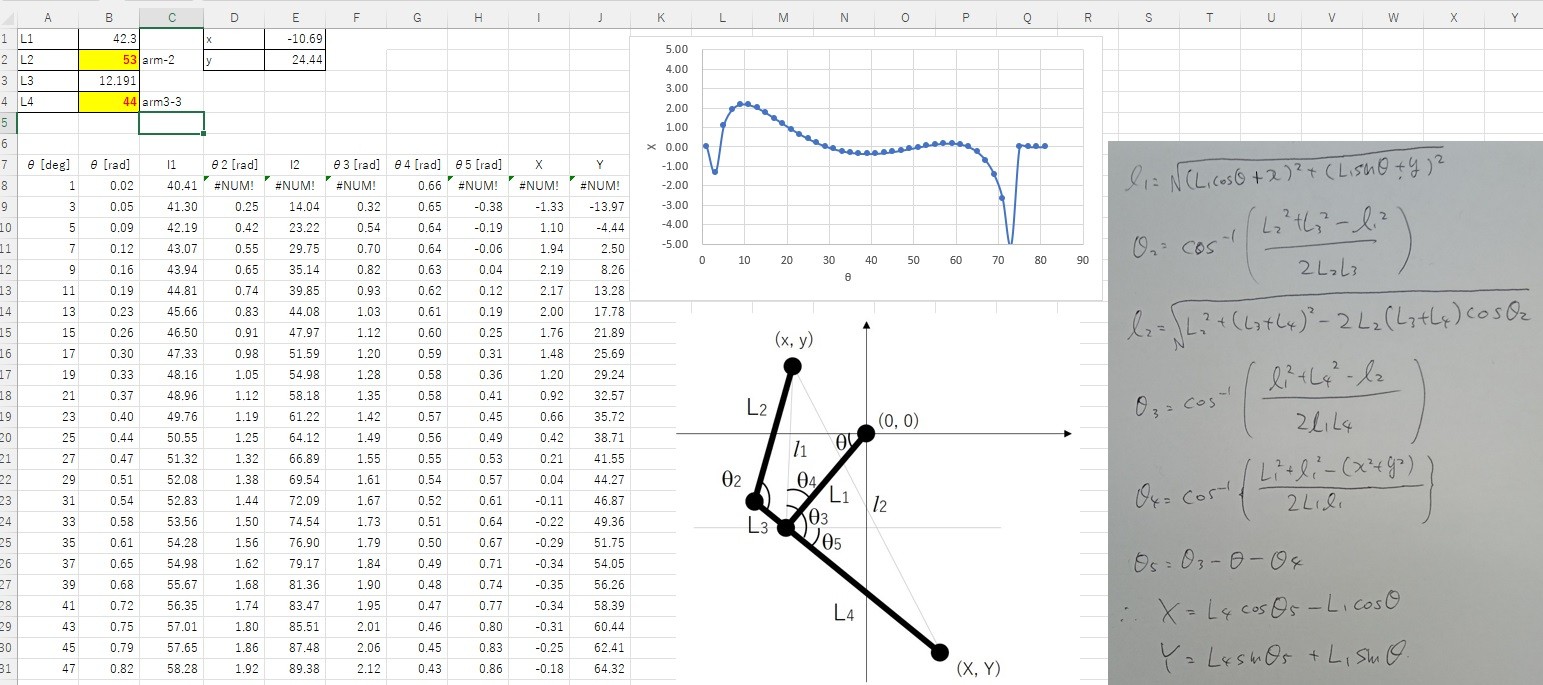
足調整
先ほどはKRS-3301 向けに適当に足を作製しましたが、ジャンプの可能性が見えたので本気で足を設計しました。
リニアに足を上下できるように調整
味の調整#電子工作界の栗原はるみ pic.twitter.com/BCfk2W1x2L
— HomeMadeGarbage (@H0meMadeGarbage) July 29, 2023
Excelで計算表を製作して足形状を決定
ジャンプ
かなり跳躍が改善しました!
おわりに
ここでは、サーボモータによるジャンプ動作の検討を実施しました。
片足で負荷も少ない状態ですが跳躍動作を確認することができました。
この可能性を信じて倒立振子の製作を進めてみようと思います。
それではまた