ブラシレスモータで2足歩行ロボット2 ー ロボット完成 ー
本記事にはアフィリエイト広告が含まれます。
前回はブラシレスモータによるサーボでリンク機構を用いた足を構築し動作をみました。
いい塩梅の足ができたので足を追加で製作して2足歩行ロボットを完成させます。

目次
足製作
他方の足を製作するべくコントローラ MKS ESP32 FOC V2.0 を追加注文したのですが、春節中でなかなか発送されませんでした。。。

やーっと届いたので足製作
順調
いまのところ pic.twitter.com/1gppEomMSR— HomeMadeGarbage (@H0meMadeGarbage) February 14, 2025
完成
でけた!
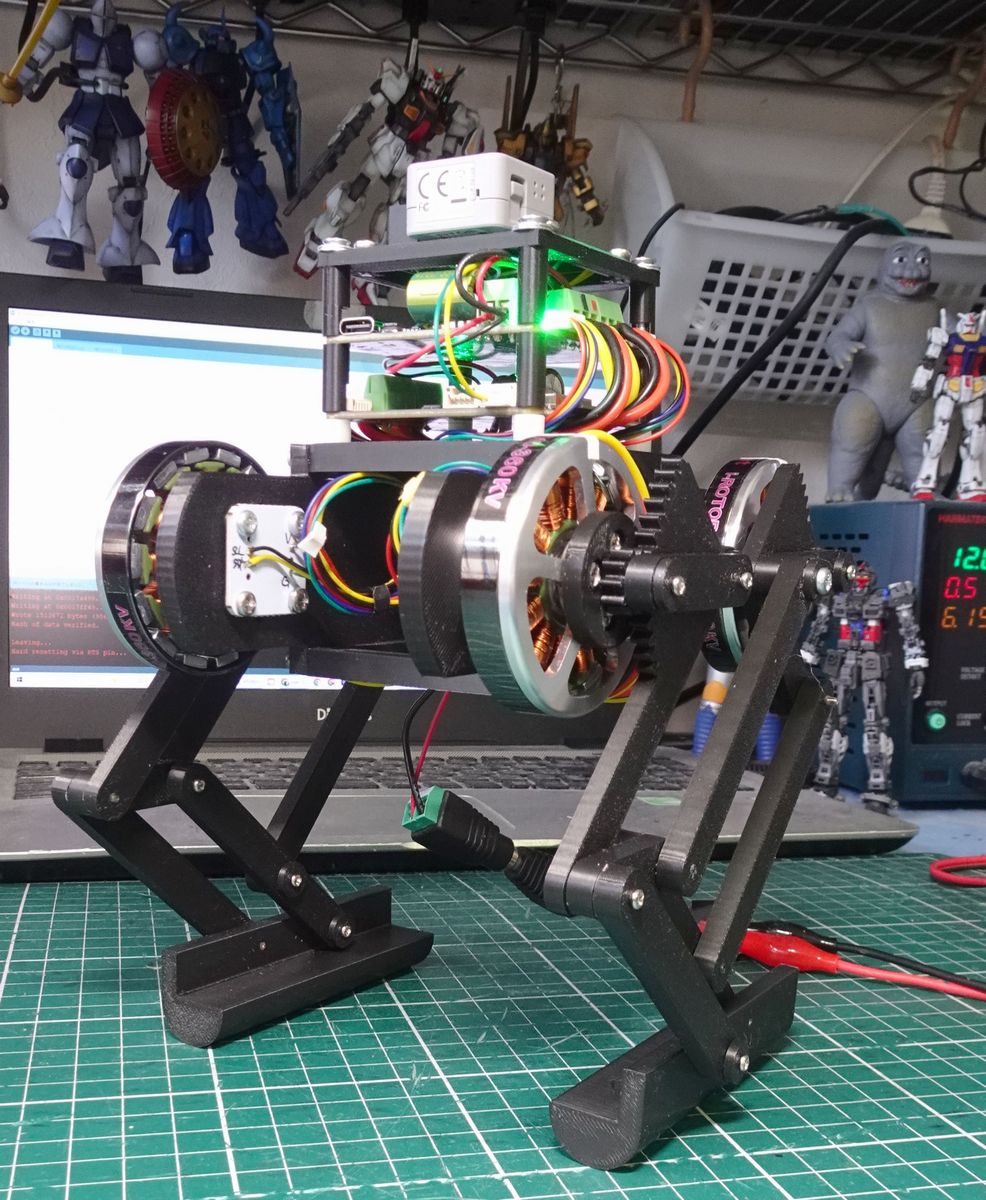
足動作味見。脚ともに問題なく動作しております。
↓こちらではPS4コントローラで足を操作
ギギギいってロボット感エグい pic.twitter.com/DW19cfuKJI
— HomeMadeGarbage (@H0meMadeGarbage) February 14, 2025
構成
構成は以下のとおり
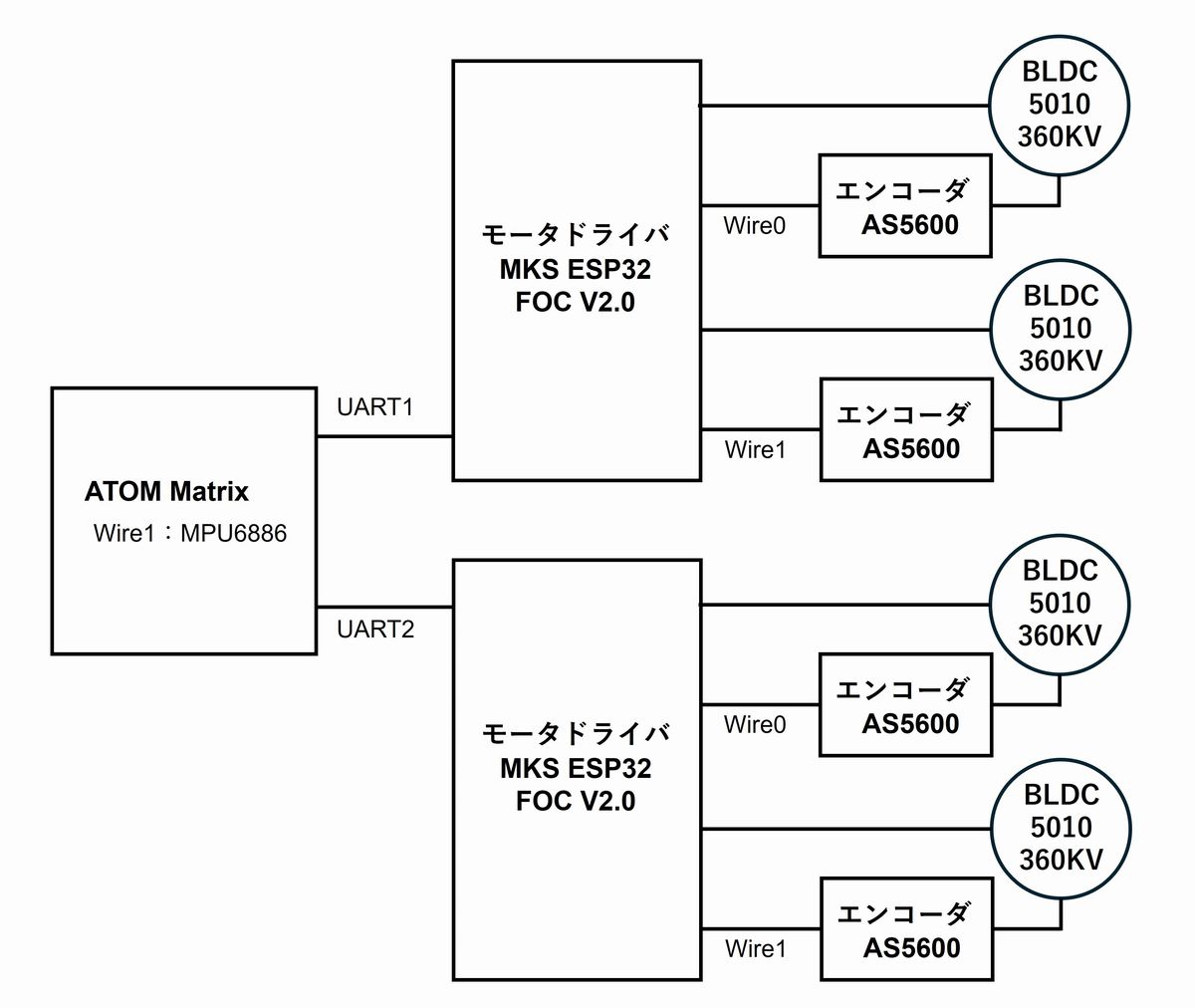
ATOM Matrixからシリアルで各足のモータの動作を足先位置座標で指示しています。
MKS ESP32 FOC V2.0には以下のように外部通信用のコネクタが2個設けられています。
これでシリアル通信してATOMと通信させています。
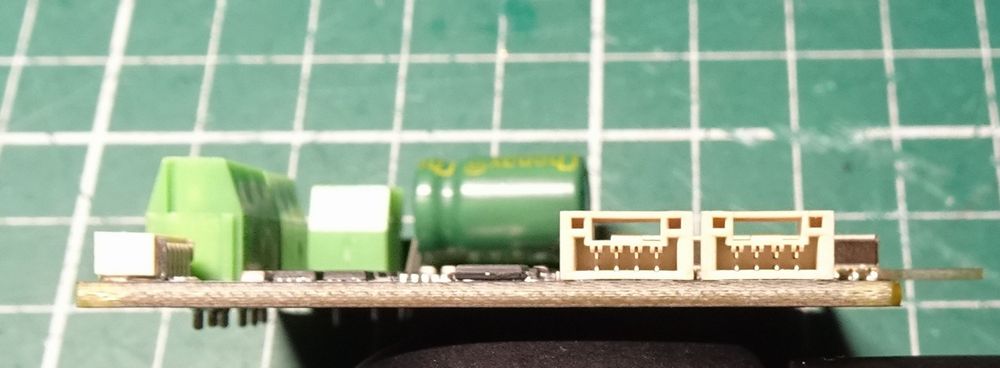
コネクタはGH規格でケーブルは以下で購入しました。

おわりに
ついにブラシレスモータサーボによる2足歩行ロボットが完成しましたので、こちらで歩行など各種動作の勉強を進めたいと思います。
高トルクで応答性も良い感じなので非常に楽しみです。
— HomeMadeGarbage (@H0meMadeGarbage) February 14, 2025
それではまた!