ブラシレスモータで2足歩行ロボット4 ー バランス動作 ー
本記事にはアフィリエイト広告が含まれます。
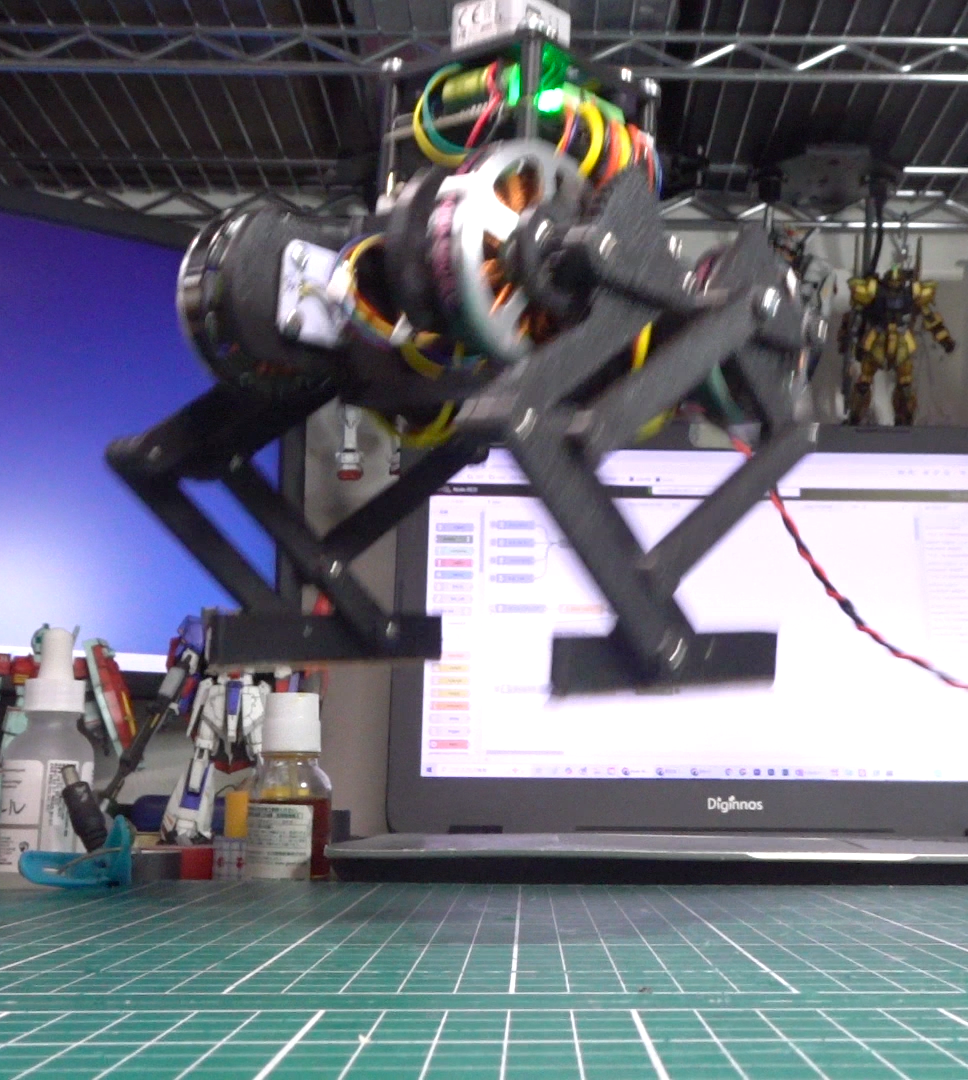
前回はブラシレスモータサーボによる2足歩行ロボットの歩行やジャンプ動作を確認しました。
これまでは前後に転ばないように足先をブレード状に長くして動作確認しました。
ここではブラシレスモータの高速動作にあやかって足を小さくして、前後のバランス動作の確認を実施します。
↓こんな風にできればいいなぁと
LimX Dynamics’ Biped Robot P1 demonstrated impressive stability and locomotion capability when kicked and pushed by audience during ICRA 2024, just like how it conqueed the wild in Tanglang Mountain in March.#robotics pic.twitter.com/0bXrPuv7Gz
— LimX Dynamics (@LimX_Dynamics) May 22, 2024

目次
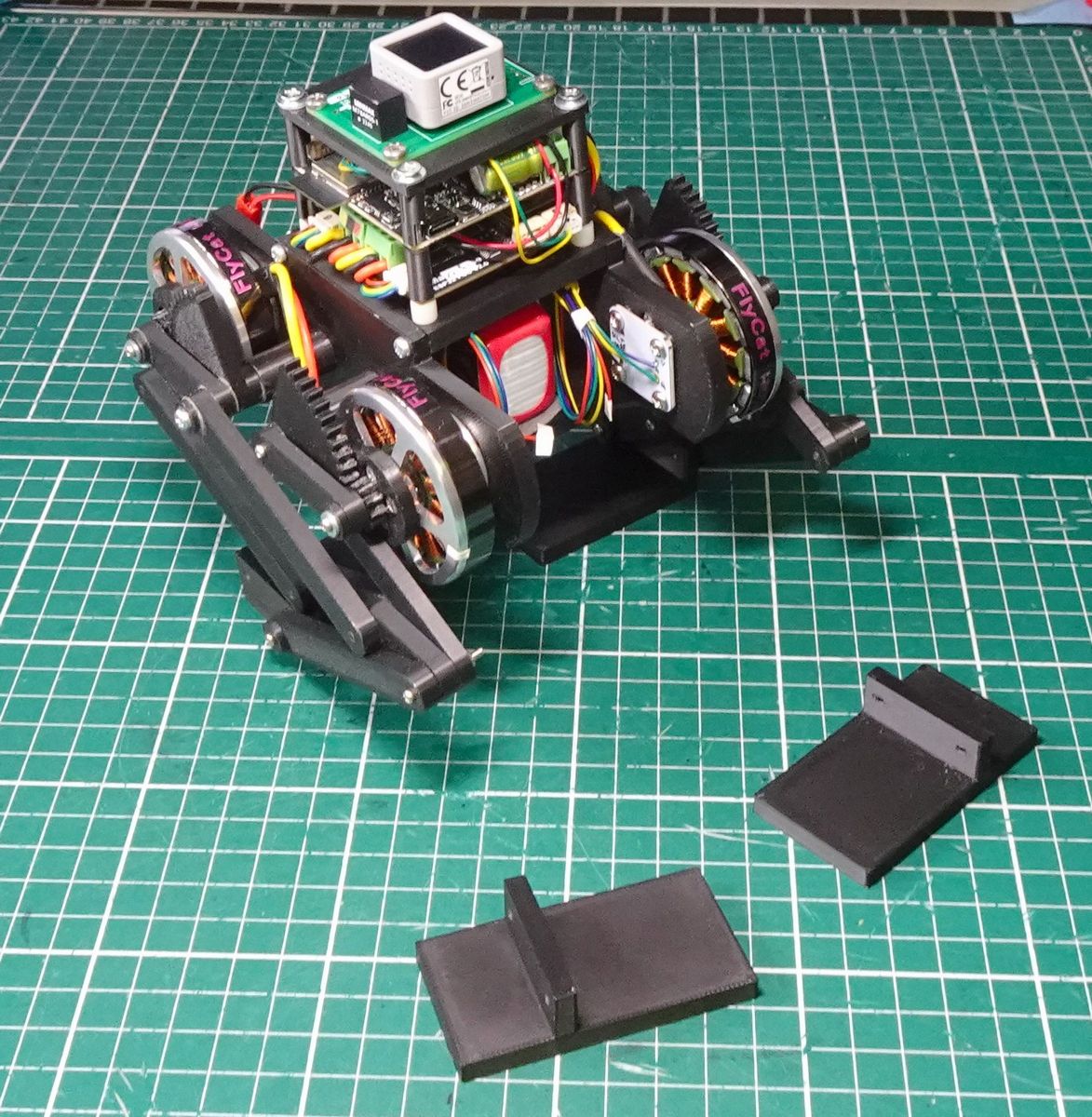
足先変更
前後のバランスつまりピッチ角に対する動作を確認するべく、足先をブレード状から小さな平面に変更しました。
ピッチ角バランス
足先を変更したのでピッチ角に対するバランス動作を確認します。
足位置PD制御
姿勢をコントローラATOM Matrix内蔵のIMUセンサで検知して、足位置を姿勢のPD制御で前後させてみました。
膝を柔らかく pic.twitter.com/YUYeMUlrVE
— HomeMadeGarbage (@H0meMadeGarbage) February 19, 2025
まだ動作が固いですが姿勢保持しようと動いてくれています。
足高さP制御追加
足位置PD制御に加えて更に足高さも変更するようにしました。
膝グニャに加えてふくらはぎのバネを意識した制御に変更
なかなか良くなり実用的レベルに鴨川ジムが合宿で浜辺行く訳だぜ pic.twitter.com/XIMePlNBzF
— HomeMadeGarbage (@H0meMadeGarbage) February 20, 2025
かなり姿勢傾きに対してかなり動作がやわらかになりました。
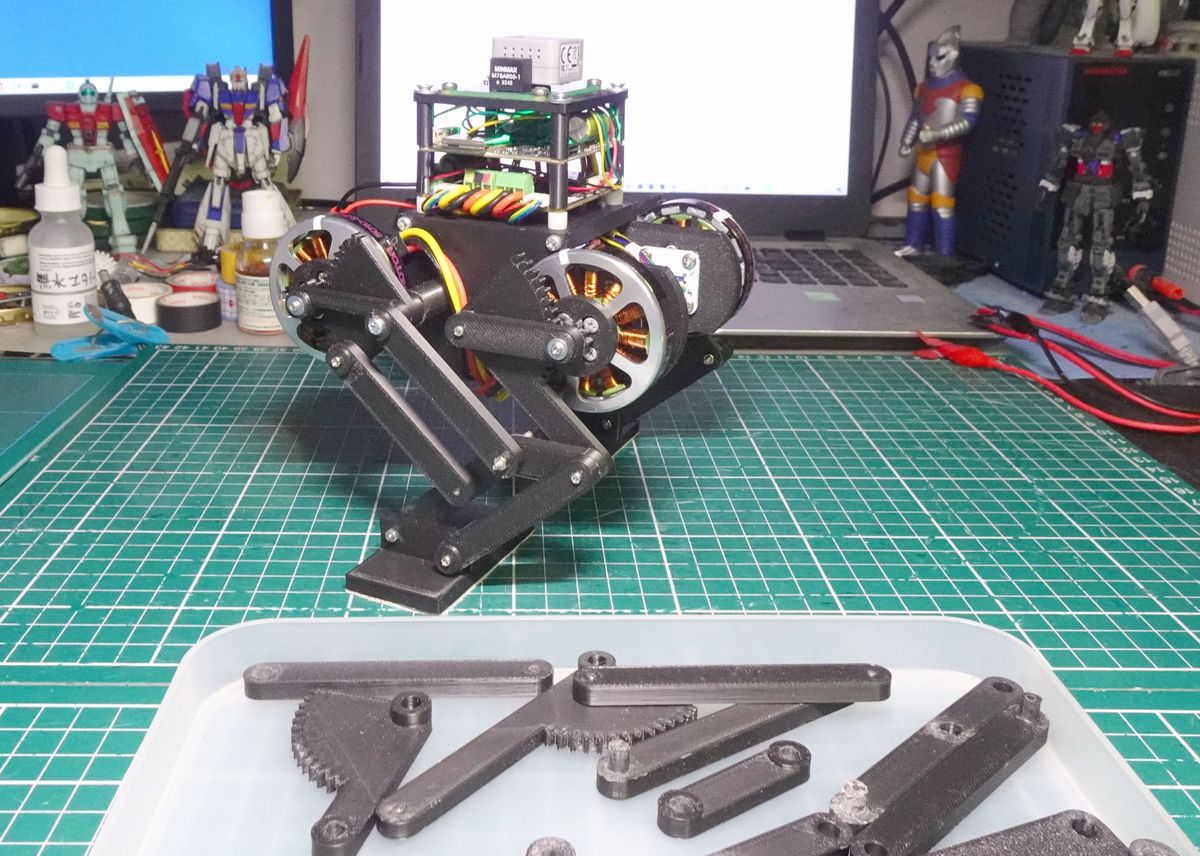
足長さ変更
ちょっと足が長くて低姿勢での前後移動のマージンがなかったので、足のアーム長を70mmから55mmに縮小しました。
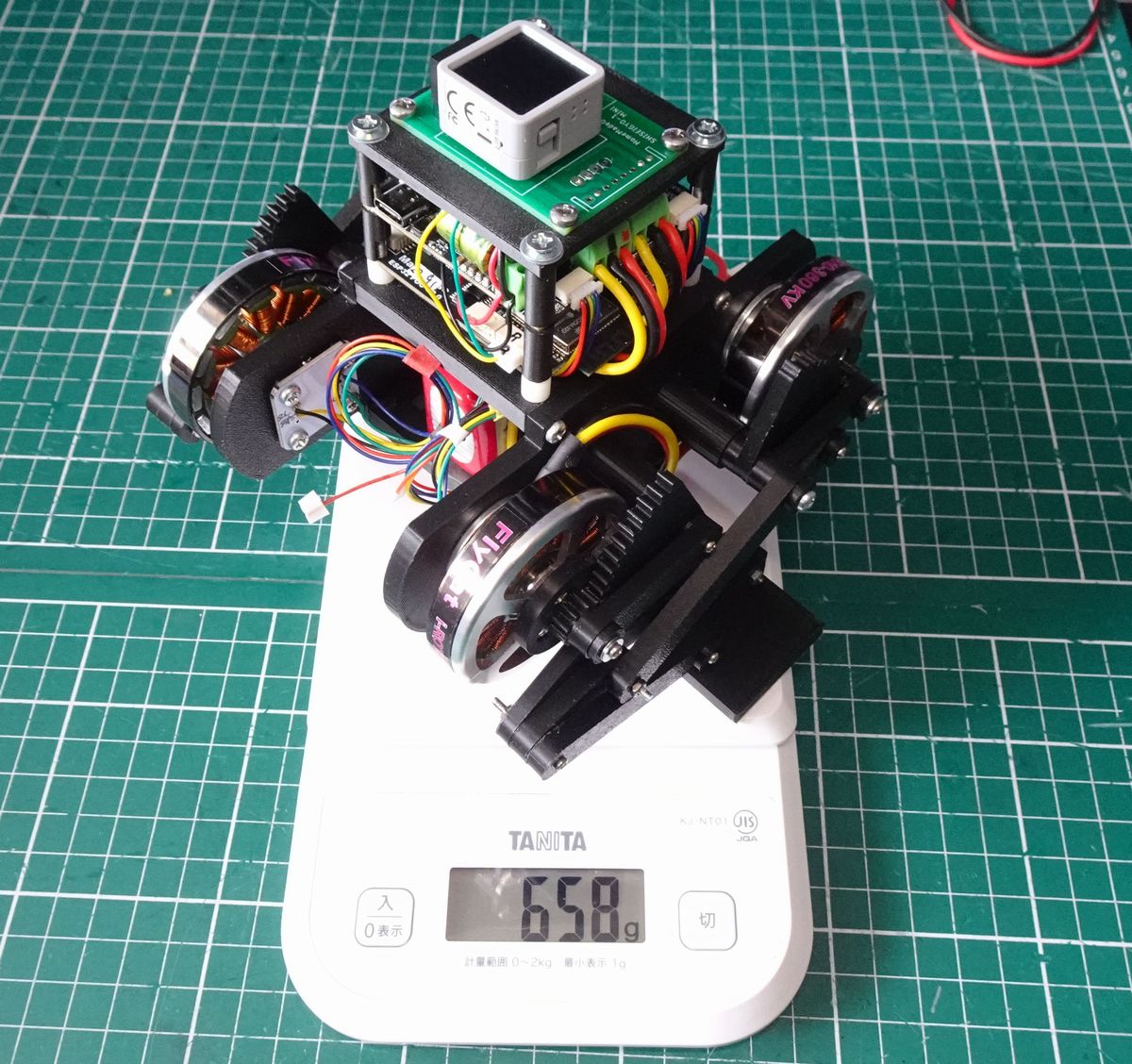
ちなみにロボットの総重量は658gでした。
足の前後移動幅が増えたので耐性が増しました。
押された方向に一歩踏み出せたらいいね
片足から試すか pic.twitter.com/ACP6bmCwwI— HomeMadeGarbage (@H0meMadeGarbage) February 20, 2025
PID制御
機体姿勢角に対する足の前後移動をPD制御からPID制御にして、
更に足を両足そろえて移動させていたのを逆方向にして足を広げるように変更しました。
だいぶ根性入ってきたな pic.twitter.com/VMAg7IQdKT
— HomeMadeGarbage (@H0meMadeGarbage) February 21, 2025
外乱に対する応答もよくなり、足を広げることにより全然転ばなくなりました。
冒頭のロボットのように外乱に対して歩くようにバランスをとらせたかったのですが、1脚モータ2個すなわち自由度2では以下のようにすり足での位置移動でしか追従動作できなかったです。
足を上げている余裕がありません。。
ホントは人間のように足上げて前後に足先移動させたいけど
2軸ではすり足でご勘弁って感じスト2で波動拳連打ガードしてるイメージ pic.twitter.com/fOkHMxmOsv
— HomeMadeGarbage (@H0meMadeGarbage) February 22, 2025
おわりに
ここではブラシレスモータサーボによる2足歩行ロボットのピッチ角に対するバランス動作を確認しました。
自由度2の足では当初夢見た素早く歩くようにバランスをことは難しかったですが、それなりの姿勢保持動作は確認できました。
ブラシレスモータの使用によって、これまで経験したことのない高速動作と高トルクを体感できました。
高いジャンプも実現できましたし
歩行についても地面蹴上げによって足上げ動作を実現できました。
しかし正直やはりロール軸にもモータが欲しいなと強く思いました。
ディズニーの可愛いロボットも足は自由度5で豊かな動作を実現しています。
a paper worth studying😉https://t.co/oIugHiOt8B pic.twitter.com/lTcrjDMO7X
— High Torque Robotics (@HTrobotics) July 31, 2024
そして希望
ブラシレスモータのロボットへの応用は有用であることを体感したと同時に、
複雑な動作にはやはり自由度を増やす対応が迫られると痛感しました。
ロール軸モータを追加しての動作確認もいつかはやってみたのですが、結局物量や金での解決となります。
なんだか熱くなれないなぁと思っていたところ。。。。
なんかみた
失望の中、以下をネットでみかける
すげーーー!!
姿勢保持にフライホイールとか使っているわけではなくホイールの駆動のみでバランスをとって、強烈なウェイトシフトでハイジャンプも実現してる。。。
https://t.co/gpzszSAV4N pic.twitter.com/7FZ1n83c6z
— R3PL1C8R Drones (@R3PL1C8R) February 21, 2025
上の具材はバッテリとウェイトシフト用アーム駆動用のモータでぎっしりの様子

アームの駆動は4つのブラシレスモータでベルト使ってるみたいだね。
どことなく今回の2足歩行ロボットの駆動系に似てる。。
ちょっと次はこのビークルを参考にブラシレスモータ制御を楽しんでみようかな。
やっぱホイールっしょ!
アナタすぐ手で持つよね pic.twitter.com/dnTuQM38Ko
— HomeMadeGarbage (@H0meMadeGarbage) December 31, 2024