玉乗りロボット つくってみた
本記事にはアフィリエイト広告が含まれます。
玉乗りロボットの製作に挑戦いたしましたので報告します。
目次
玉乗りロボット
以前AliExpressサーフィンをしていたところ…
これオムニホイールでできるんか!
あとBGMが謎¥18673.0 6% OFF|二つの開発のボールバランスのとれた球状自己均衡車サポート用ボール均衡ロボット|エアコン パーツ| – AliExpress https://t.co/opQR4eitjC pic.twitter.com/HVujhijMiD
— HomeMadeGarbage (@H0meMadeGarbage) January 30, 2021
玉乗りロボットをみつけてオムニホイールで出来るものなのだと大変驚きました。
この時はまだオムニホイールを入手したこともなく、是非作りたいとも思わなかったのですが頭の片隅に強烈にこびりついたのでした。

SHISEIGYO-3 DC
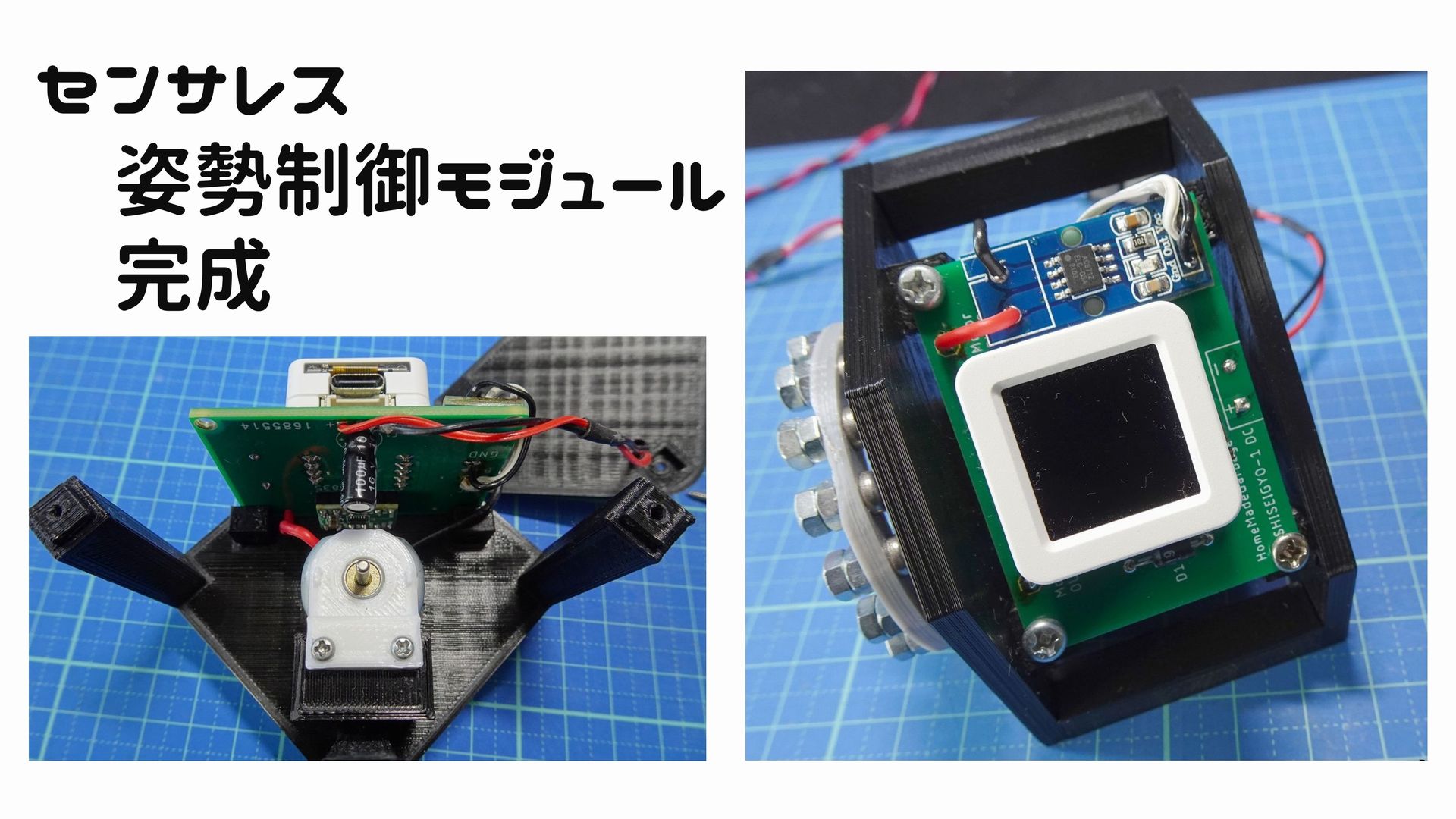
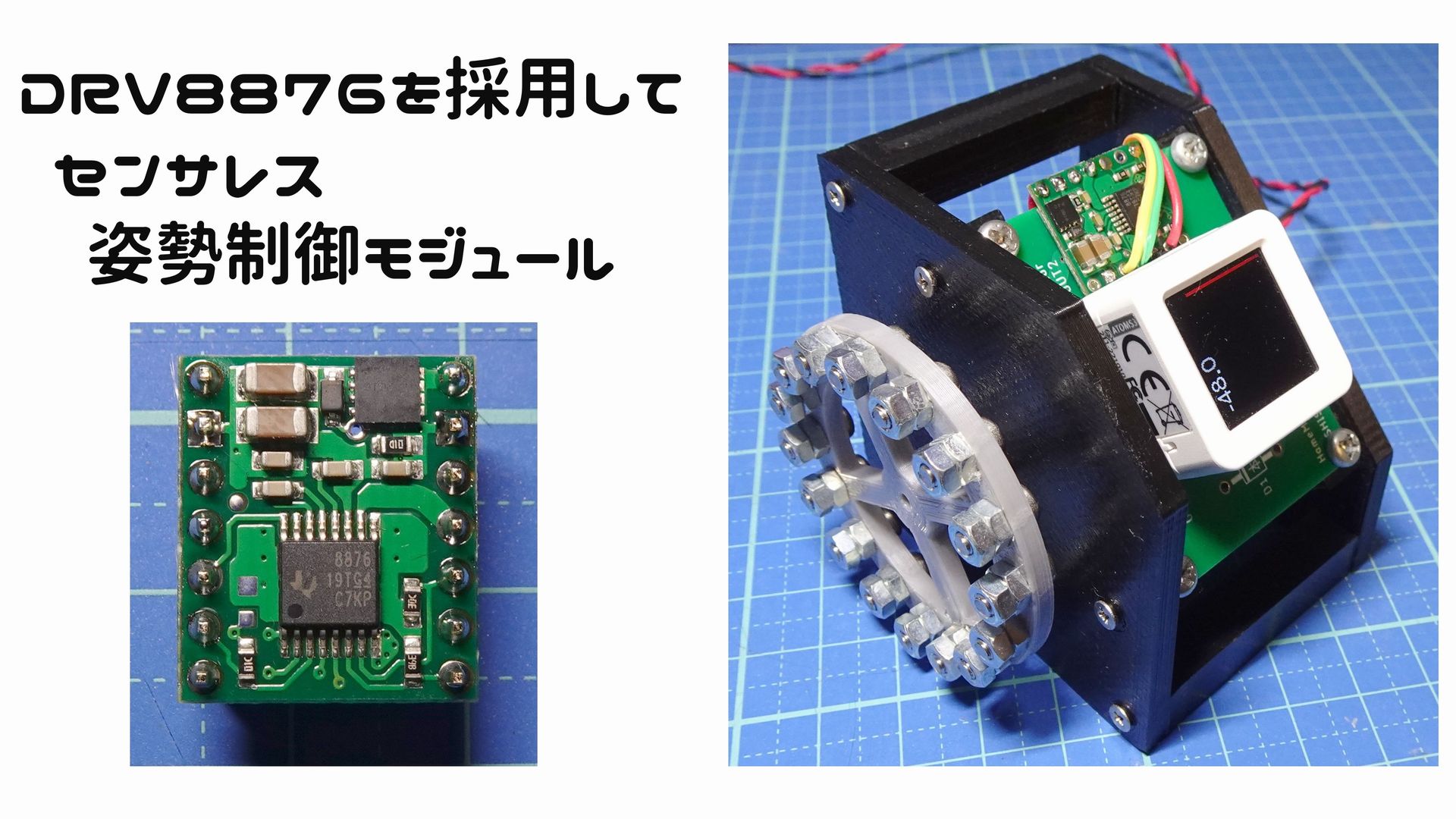
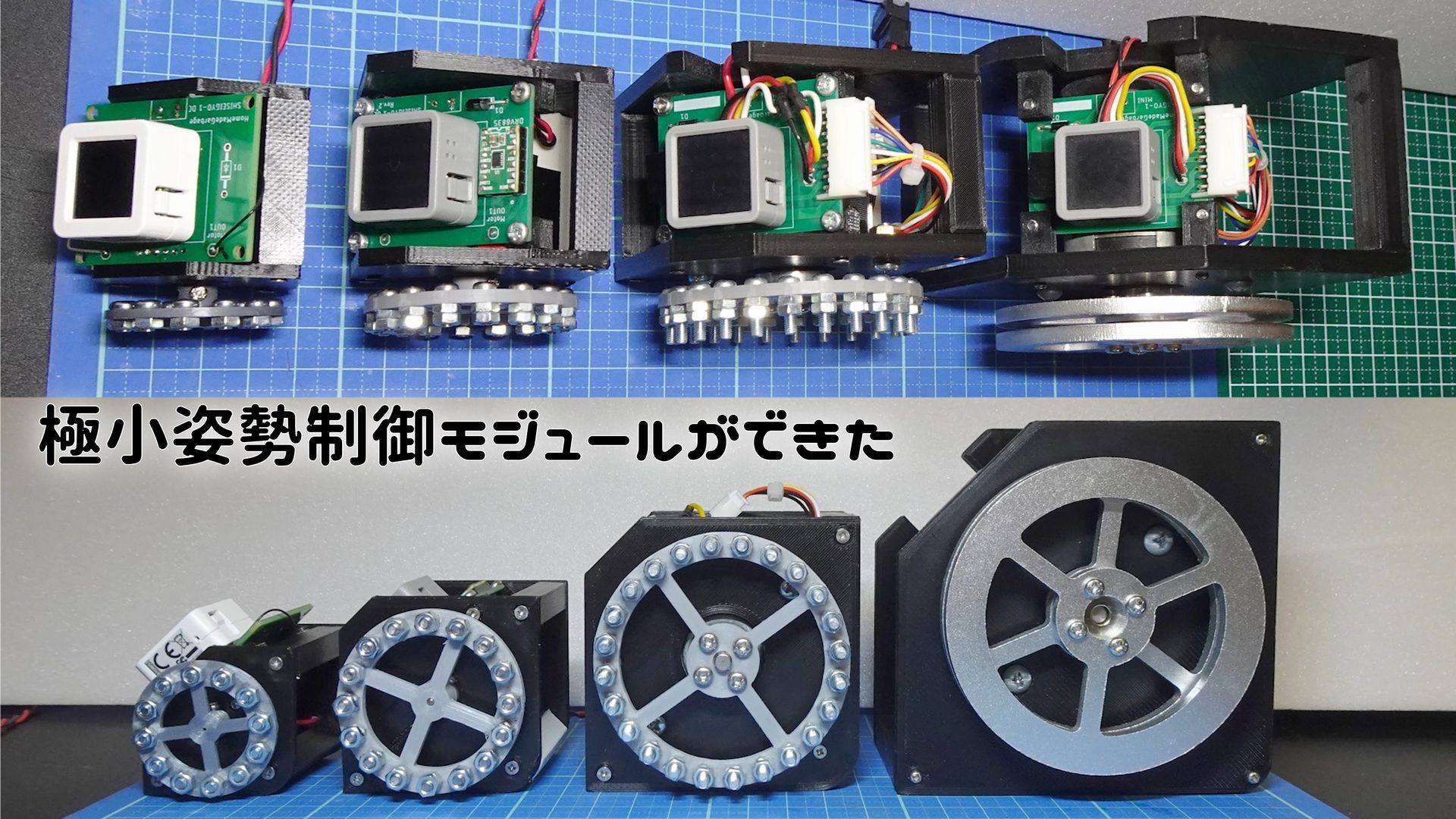
以前にドローン用小型モータを用いて3軸の姿勢制御モジュールを製作しました。
ふとこの機構そのままで玉乗りロボットができるのではと思い立ったのです。
DCモータによる3軸姿勢制御モジュール
ドローン用小型モータを用いてエンコーダや電流測定なしの実に簡素な構成・センサレスで点倒立を実現。
動画では角速度によるP制御で自転をもコントロール。絶賛レシピ執筆中! pic.twitter.com/3xb5sAh7Wh
— HomeMadeGarbage (@H0meMadeGarbage) June 12, 2024
オムニホイール
玉乗りロボットを製作するにはオムニホイールの入手が必要となります。
しかしこれが結構高額でこれまで手が伸びなかった大きな理由でもあります。
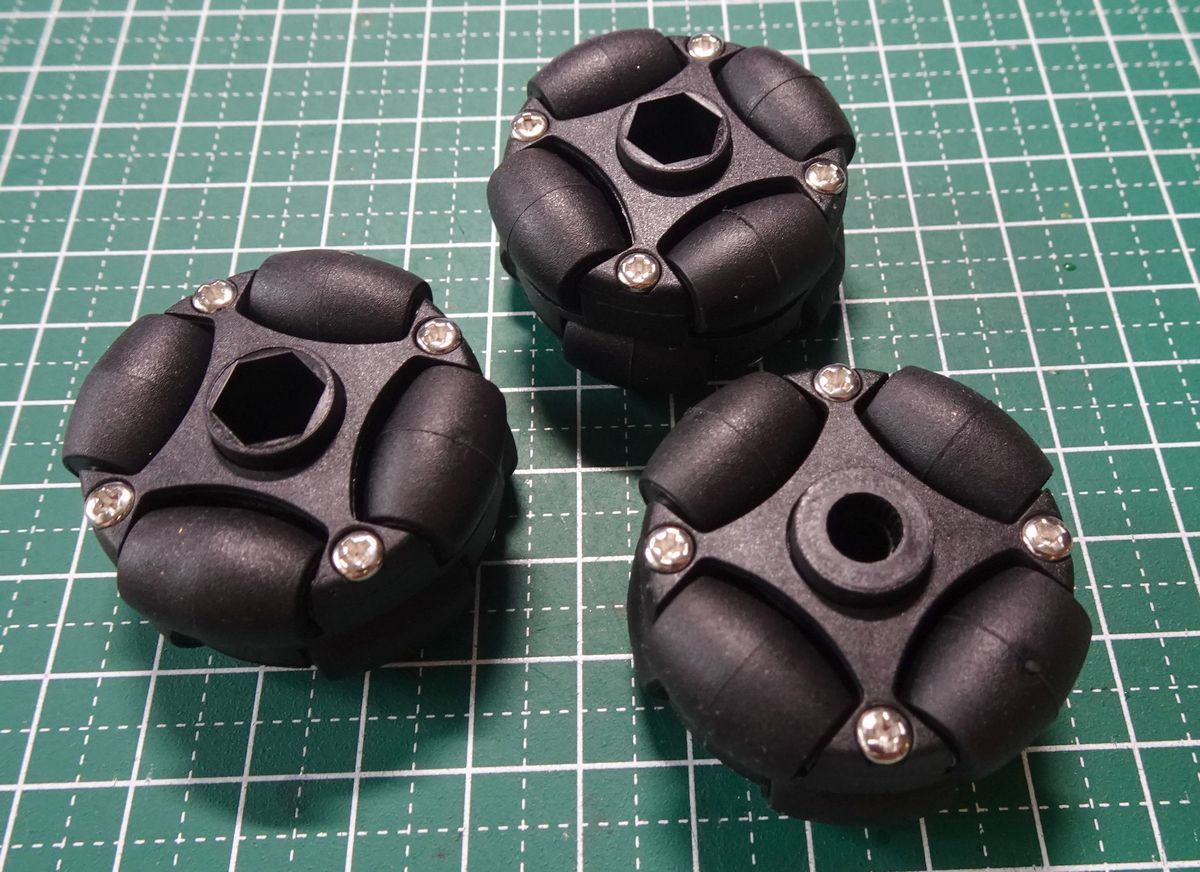
玉乗りロボットを作ってみたいという一心で一生懸命探したところプラスチック製の比較的安価なホイールを見つけました。
[amazonjs asin=”B07WT4VT6J” locale=”JP” title=”P Prettyia プラスチック 全方向性 ロボットホイール 耐衝撃性 組み立て容易”]
早速3つ購入。
中国から配送され届くまでに2週間ほどかかりました。
ギアドモータで回転を楽しむ
ほう オムニの回転は味わい深いですね
お母さんの味がしますプラスチック 全方向性 ロボットホイール https://t.co/9NmLZ4lXvv pic.twitter.com/yVAD3WvIWZ
— HomeMadeGarbage (@H0meMadeGarbage) June 17, 2024
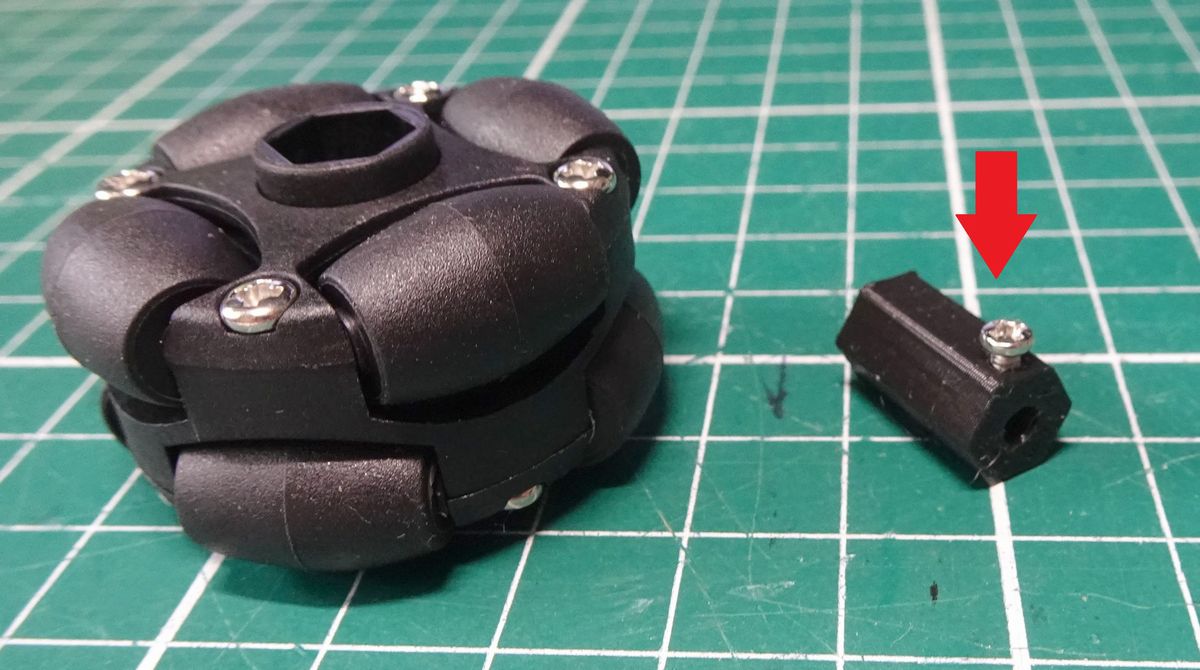
使用したモータは200rpm
[amazonjs asin=”B085T446RP” locale=”JP” title=”GA12-N20 DC 3Vギアモーター 低ノイズ 高ねじり 減速機ギアモーター 15-1000RPM メタルギアボックス 付き (200RPM) 安定性能 9つのスタイルで利用可能”]
ホイールとモータの結合治具を3Dプリントしました。
玉乗りロボット製作
憧れのオムニホイールが手に入ったので玉乗りロボットの製作を開始します。
筐体を3Dプリントして早速組みました。

コントロール機構は SHISEIGYO-3 DC のものをそのまま流用し、モータとして200rpmの小型ギアドモータを搭載しました。
電源は1セルのLiPoバッテリを使用。
[amazonjs asin=”B01AJ7DH9O” locale=”JP” title=”ドローン バッテリー Hubsan JJRC 3.7V 380mah Lipo リポバッテリー ※過充電保護機能付き 並行輸入品”]
玉乗りのボールにはダイソーで買った直径15cmのウレタンボール(300円)を使用。
1st動作
SHISEIGYO-3 DC と全く同じ制御プログラムで玉乗り動作をさせてみました。
ファーストコンタクト
どうだろ?調整でいけるだろうか
考え方は正しそう
モータ遅いかもしれない pic.twitter.com/wkqraOV4Rc— HomeMadeGarbage (@H0meMadeGarbage) June 17, 2024
流石に玉乗り1発動作はできませんでしたが、制御の考え方は間違っていないようで玉に乗ろうと一生懸命動いてくれました。
制御パラメータを調整して再トライ
やはり応答遅い。ボール軽すぎだ
モータ早くするか
今200rpmのギアドモータだから
500rpmとか1000rpm試すかな。もしくは直接駆動でいいかもね。 pic.twitter.com/XjqMYRCsst— HomeMadeGarbage (@H0meMadeGarbage) June 17, 2024
なかなかいい線いっていますが、ちょっと応答が間に合っていないようです。
モータを速くしたい気持ちが芽生えます。
玉を手元にあったフットサル用の4号球 (直径20.5cm)にしてみました。
玉の直径と重量が大きくなったことで、制御周期が長くなったためか完全安定ではありませんが玉乗り動作が実現できました。
なんとオムニホイールを入手して半日で玉乗り動作を確認できてしまいました。さすが俺ですね。
4号玉対応
筐体を4号球向けに作り直してホイールがボールにキチンと設置するようにしました。
更に安定感が増しました。
動作が面白い!
こういうのが一番飯が進むんだよ pic.twitter.com/a6VPWqX2YG
— HomeMadeGarbage (@H0meMadeGarbage) June 18, 2024
しかし完全に安定はしておらず外乱に激よわです。。
もうちょい早いモータ調達中 pic.twitter.com/HeZCwuxsA6
— HomeMadeGarbage (@H0meMadeGarbage) June 19, 2024
モータの応答を高速にしたいところです。
DCモータ検討
モータの応答性を良くするべくDCモータを採用してホイールを直接駆動してみました。
FA-130RA と RE-280RA で試しましたが、いずれもトルクが足りずホイールがうまく回転しませんでした。。
DCモータ固定させてください pic.twitter.com/IbCnsHLgBN
— HomeMadeGarbage (@H0meMadeGarbage) June 18, 2024
[amazonjs asin=”B08CCKYNZ8″ locale=”JP” title=”TAMIYA タミヤ AO-1001 FA-130 ノーマルモーター 94380 【 3袋セット 】”]
やっぱり全然トルク足りんかった
このいびつなホイールを回しきるには大いなるパワーが必要であることを身をもって理解 pic.twitter.com/8isrsFMunV— HomeMadeGarbage (@H0meMadeGarbage) June 19, 2024
[amazonjs asin=”B004KJ66G4″ locale=”JP” title=”マブチモーター RE-260RA”]
ギアドモータで最適なトルクの製品を探すことになりそうです。
おわりに
ここではオムニホイールによる玉乗りロボット製作の報告を行いました。
まだ完全安定とは言えませんが想定した制御方式で玉乗り動作を確認できたことはこの上ない喜びでエンジニア冥利に尽きます。
完全安定や自由自在な移動も実現したいのでモータ選定から地道に考えていきたいと思います。
引き続きよろしくお願いいたします。