SCS0009を用いた4脚ロボットの製法
本記事にはアフィリエイト広告が含まれます。
目次
はじめに
これまでに各種サーボモータを使用して4脚ロボットを製作してきました。
以下の記事ではシリアルサーボの STS3032 と SCS0009 、そしてPWMマイクロサーボでの比較を実施しました。
どの4脚ロボットが魅力的であるかアンケートを募ったところ以下のような結果となりました。
サーボモータ8個による4脚ロボット
つくるならどれがいいですか?— HomeMadeGarbage (@H0meMadeGarbage) March 4, 2024
やはり安価で手軽に使用できるSG90級のPWMサーボで作りたいという意見が多かったです。
SG90によるロボットは既に良書があって今さら製法公開に魅力は感じませんし、私は電子工作界の栗原はるみを目指しておりますので次点の高額なSTS3032での作例レシピを書くことにも抵抗がありました。
私が製法公開する意義を見失っていた中で、 SCS0009 による4脚ロボットでバク転を実現することができました。
バク転が出来るようになるまでの練習過程 pic.twitter.com/bz9YkIHpUv
— HomeMadeGarbage (@H0meMadeGarbage) March 26, 2024
比較的安価で入手性も良いシリアルサーボ SCS0009 でバク転可能な4脚ロボットというのはなかなか面白いと思いますので、ここで製法を公開したいと思います。
何かございましたらコメントなどでご意見いただけますと幸いです。
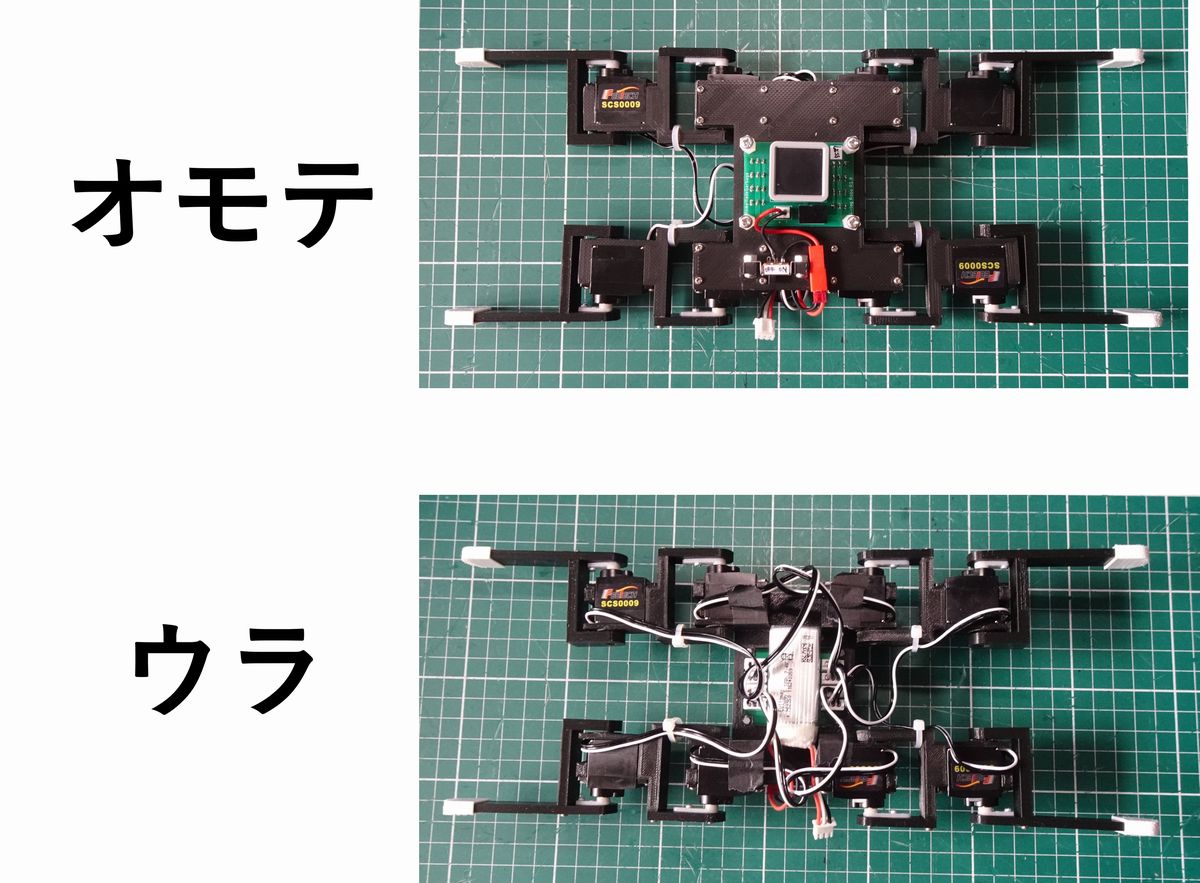
構成
マイコンにはIMU内蔵のATOM Matrixを使用します。
2セルのLiPoバッテリを使用してマイコンへは5Vに降圧して供給しています。

ここでは筐体パーツは3Dプリント品で、コントローラは専用基板を製作し用いています。
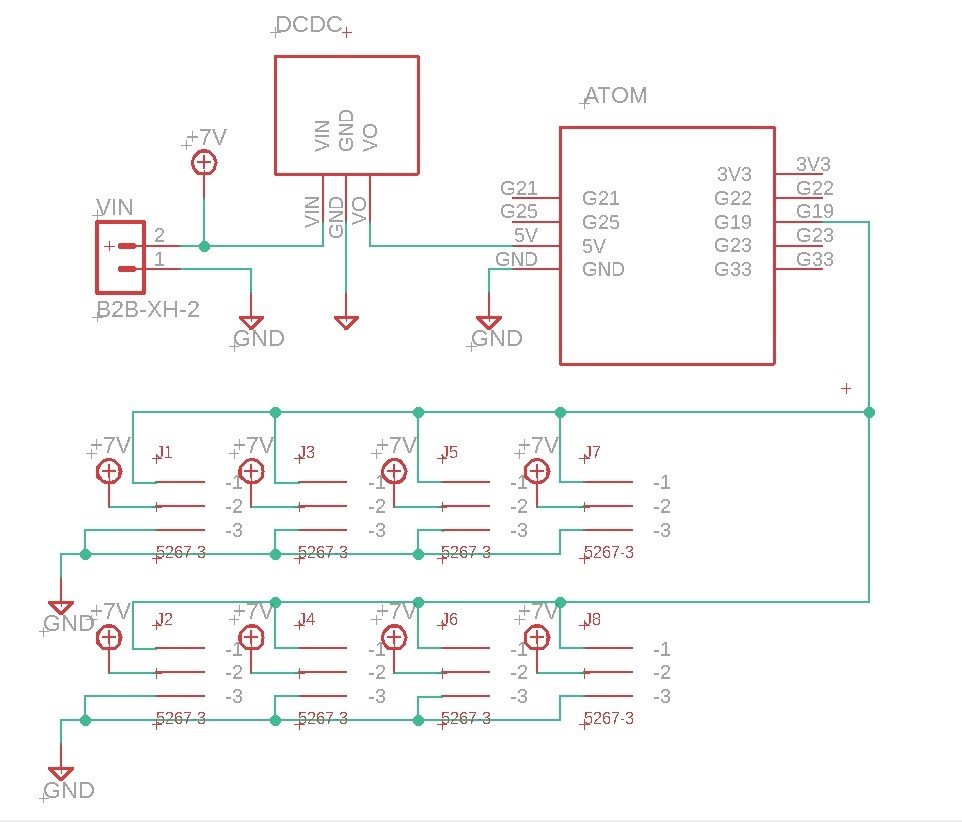
回路図
以下が本4脚ロボットの回路図です。先の構成図の通り非常に単純です。
部品
ここで使用した部品は以下のとおりです。参考まで
- ATOM Matrix
スイッチサイエンス:https://www.switch-science.com/products/6260
秋月電子:https://akizukidenshi.com/catalog/g/g117215/ - シリアルサーボ SCS0009
AliExpress:https://ja.aliexpress.com/item/1005005950881566.html
スイッチサイエンス:https://www.switch-science.com/products/8042
マルツ:https://www.marutsu.co.jp/pc/i/2349126/ - 5V 降圧DCDC
秋月電子:https://akizukidenshi.com/catalog/g/g113536/ - 2セル 7.4V LiPoバッテリ
Amazon GRIFFIN :https://amzn.to/3QeNr3K
Amazon Kypom:https://amzn.to/3WdmW2I - シリアルサーボ基板接続用コネクタ molex 5267-3
Amazon:https://amzn.to/4b4GdHv
千石電商:https://www.sengoku.co.jp/mod/sgk_cart/detail.php?code=EEHD-0HWA - LiPoバッテリ用配線コネクタ
Amazon:https://amzn.to/3QgJw6u - 電源用スライドスイッチ
Amazon:https://amzn.to/3zRaI4j
ロボット組立てに使用したネジは以下のとおりです。
- なべタッピングネジ 2×8mm:12本 (ボディとサーボ固定部接続用)
- M2×6mmネジ:9本 (サーボアームと筐体固定用、 ATOMと基板固定用)
- なべタッピングネジ 2×10mm:16本 (足パーツ固定用)
- M3ネジもしくはスペーサー:4本 (基板固定用)
- M3×8mmネジとナット:2セット (スライドスイッチ固定用)
専用基板
以下で専用基板を販売しておりますので宜しければご購入のほどよろしくお願いいたします。
構成がシンプルであるためユニバーサル基板などでの自作も容易かと思います。
基板のサイズは以下のとおりで、筐体3Dモデルもこの基板サイズを元に製作しています。

3Dモデル
3Dモデルは以下よりダウンロードできます。zipファイルがダウンロードされます。
4脚ロボット筐体用3Dモデル
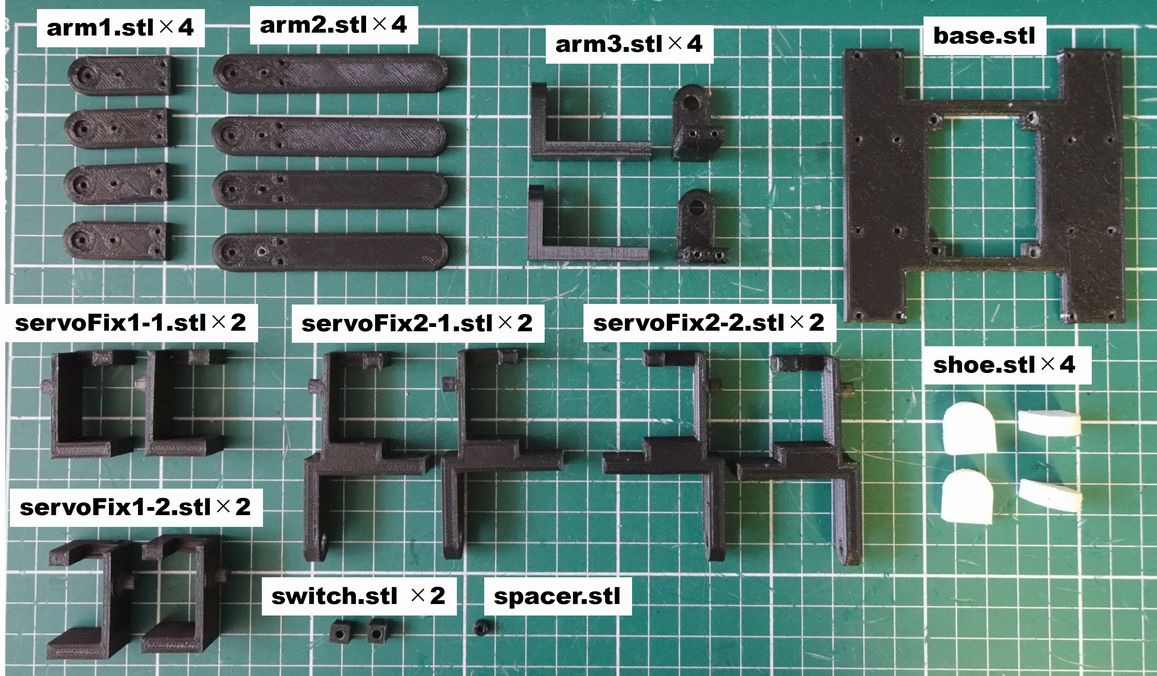
ここではshoe.stlのみTPUフィラメントで出力し、残りはPLAフィラメントで出力しました。
改訂履歴
- 2024年4月23日:公開(初版)
- 2024年4月30日:ネジ穴 微調整
base.stl:servoFix1固定ネジ穴調整
servoFix1、servoFix2:サーボ固定ネジ穴縮小
筐体組み立てキット
3Dプリント品も販売しております。
よろしければご検討ください。
ロボット製作
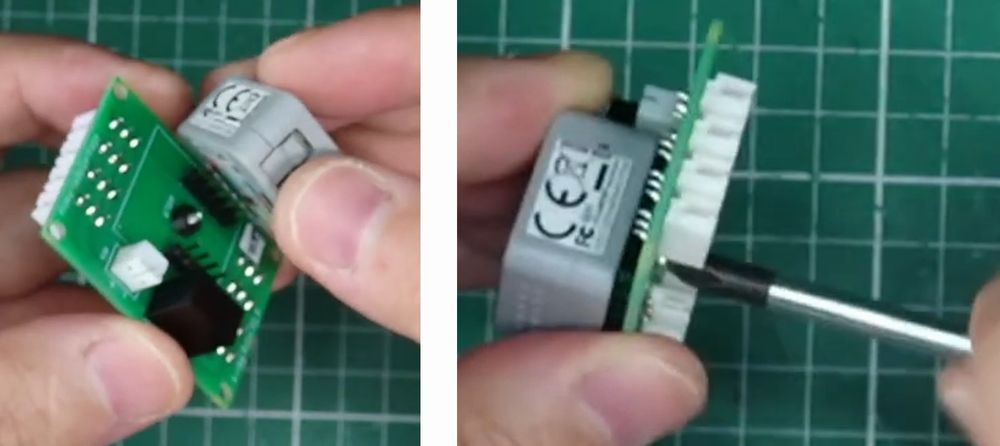
サーボモータ設定
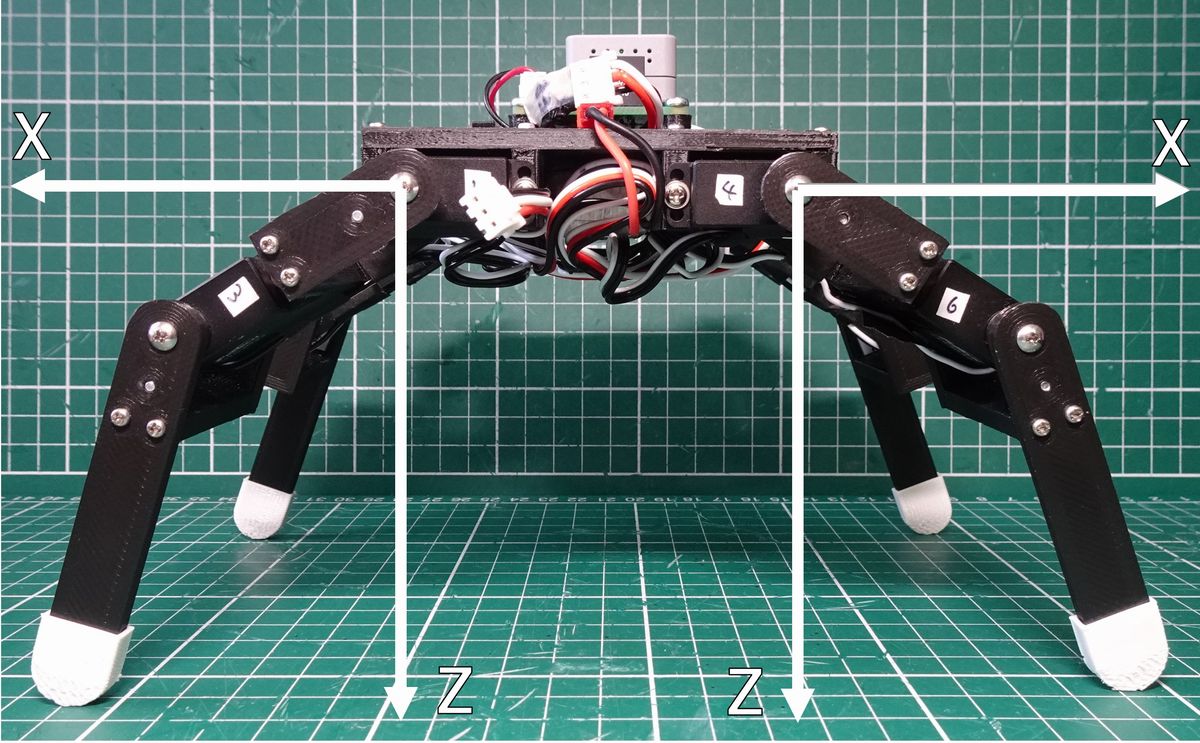
SCS0009サーボは専用ソフトでIDを設定して以下のように配置しました。
ボーレートも1M bpsに変更します。

SCS0009は信号0~1023に対して0~300°回転します。専用ソフトで中点の信号511をした状態でサーボ付属のアームを以下のように水平になるようにはめ込みます。

片側アームが付属されていない場合はニッパーで切るなどで対応ください。
ここで完全にアームを水平に出来なくても後ほどオフセット調整しますので問題ありません。
アームには筐体固定用に中心穴から3番目の穴を2mm径で穴あけしておきます。
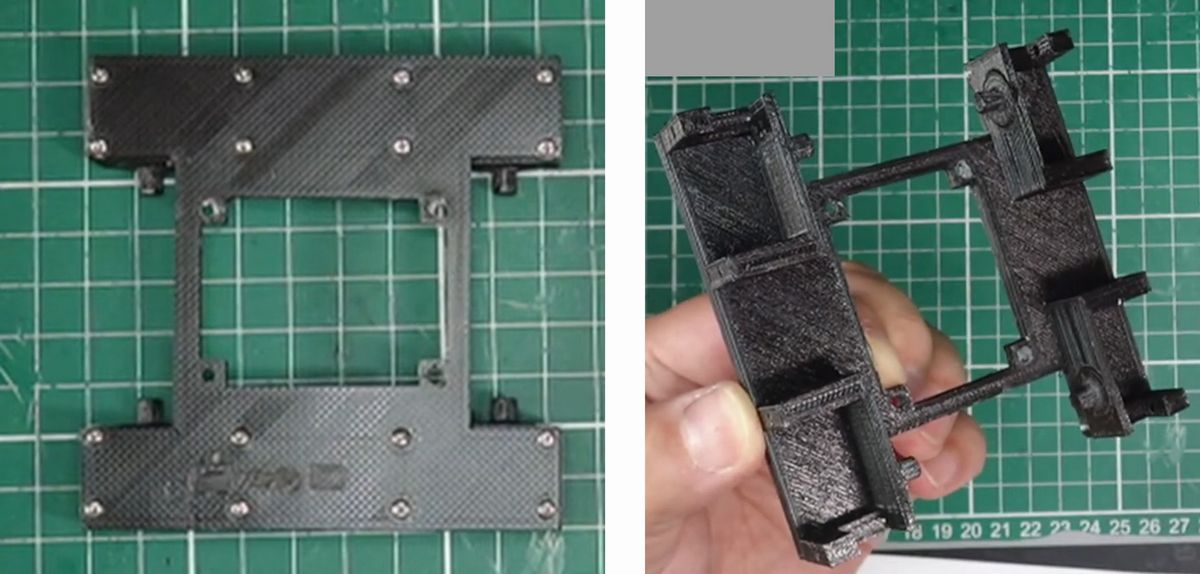
筐体組み立て
なべタッピングネジ 2×8mm (12か所)でbase.stlにservoFix1-1.stlとservoFix1-2.stlを2個づつネジ止めします。
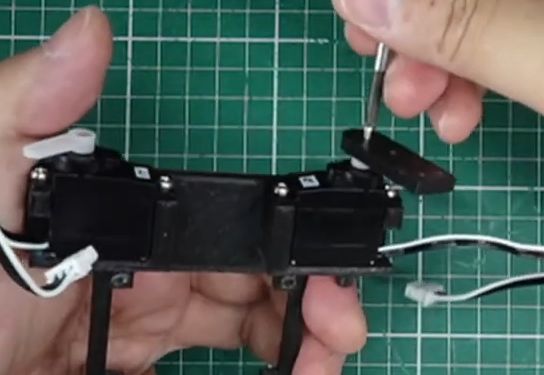
サーボを前述のIDの通りに付属のネジでservoFix1に固定します。

サーボのアームにarm1.stlを固定します。arm1.stlは中心の穴をM2ネジ用のタッピングでネジ切りして、サーボのアームに開けた2mm穴にM2×6mmネジで固定します。

ネジ切りせずに長めのネジでナット固定でも構いません。
M2×8mmネジでアーム軸とも固定します。
大腿パーツservoFix2をservoFix1の丸突に通してarm1の先端の2か所となべタッピングネジ 2×10mmでネジ止めします。

servoFix2の先に膝となるサーボを前述のIDの通りに付属のネジで固定します。

膝サーボのアームはarm3との干渉を避けるために以下のようにニッパーで切り取ってください。
下肢パーツarm2とアームをarm1の時と同様に固定します。

arm2とarm3を2個の2×10mmでネジ止めします。

足先にTPUフィラメントで出力したshoe.stlを履かせて筐体は完成です。
コントローラ
前述の回路と部品で制御基板を構築します。
ATOM Matrixと基板はピンヘッダで接続して、基板間にM2×6mmネジでspacer.stlを通して固定します。
基板はbase.stlにM3ネジ用タッピングでネジ切りして4か所でねじ固定します。
ここではロボット反転時にATOM Matrixが地面などにぶつからないように17mm程度の高さになるネジタイプのスペーサで固定しました。

サーボを基板コネクタに接続 (信号線はパラレルに接続されているので接続位置はどこでもOK)し、バッテリを両面テープで固定します。

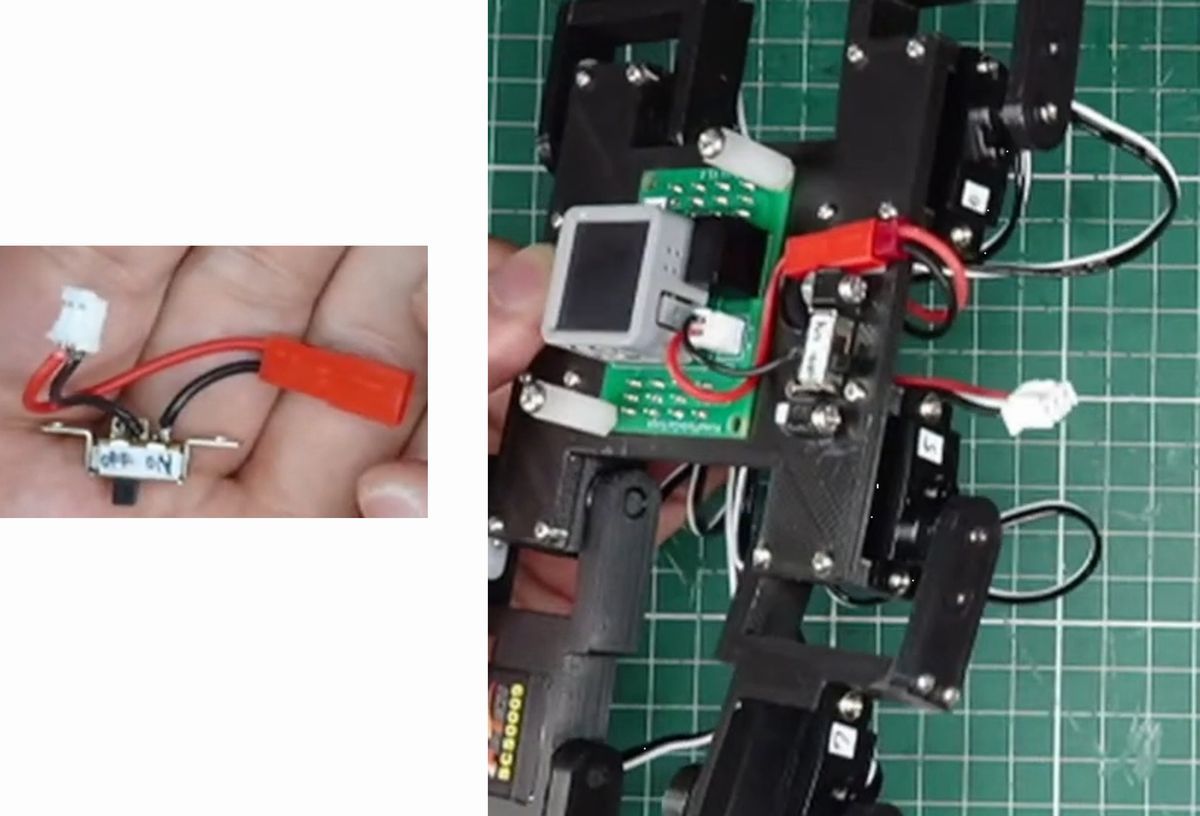
電源周り
コントロール基板の電源入力にバッテリ(7.4V)を接続します。ここではバッテリコネクタ間にスライドスイッチを挿入しております。
スイッチはswitch.stlをbodyに接着してM3×8mmネジとナットで固定しています。
組み立て動画
以下はサーボの設定から筐体組み立てまでの様子を配信したアーカイブ動画です。
宜しければ参考にしてください。
サーボオフセット調整
サーボにアームを差し込んだ際にメカ的誤差で水平がとれていない状況ですので調整します。
サーボ角度指定信号にオフセット値を与えて水平にして、ロボットのサーボ角度0°指定の際の姿勢を以下のようにビターっとまっすぐにします。

調整の様子
後述するアプリをATOM Matrixに書き込み、ATOMをアクセスポイントとしてWiFiを介してスマホ(もしくはPC)と接続しオフセット調整します。
以下が実際に調整している様子です。
調整用アプリ Arduinoコード
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 |
#include <M5Atom.h> #include <Kalman.h> #include <Preferences.h> #include <WiFi.h> #include <WebServer.h> WebServer server(80); const char ssid[] = "servoOffset"; // SSID const char pass[] = "password"; // password const IPAddress ip(192, 168, 55, 28); // IP address const IPAddress subnet(255, 255, 255, 0); #define led_pin 27 #define NUM_LEDS 25 Preferences preferences; // ID 0 1 2 3 4 5 6 7 int offset[] = {0, 0, 0, 0, 0, 0, 0, 0}; //browser void handleRoot() { String temp ="<!DOCTYPE html> \n<html lang=\"ja\">"; temp +="<head>"; temp +="<meta charset=\"utf-8\">"; temp +="<title>servoOffset</title>"; temp +="<meta name=\"viewport\" content=\"width=device-width, initial-scale=1\">"; temp +="<style>"; temp +=".container{"; temp +=" margin: auto;"; temp +=" text-align: center;"; temp +=" font-size: 1.2rem;"; temp +="}"; temp +="span,.pm{"; temp +=" display: inline-block;"; temp +=" border: 1px solid #ccc;"; temp +=" width: 50px;"; temp +=" height: 30px;"; temp +=" vertical-align: middle;"; temp +=" margin-bottom: 8px;"; temp +="}"; temp +="span{"; temp +=" width: 120px;"; temp +="}"; temp +="button{"; temp +=" width: 100px;"; temp +=" height: 40px;"; temp +=" font-weight: bold;"; temp +=" margin-bottom: 8px;"; temp +="}"; temp +="button.on{ background:lime; color:white; }"; temp +=".column-3{ max-width:330px; margin:auto; text-align:center; display:flex; justify-content:space-between; flex-wrap:wrap; }"; temp +="</style>"; temp +="</head>"; temp +="<body>"; temp +="<div class=\"container\">"; temp +="<h3>servoOffset</h3>"; //ID0 offset temp +="ID0<br>"; temp +="<a class=\"pm\" href=\"/id0M\">-</a>"; temp +="<span>" + String(offset[0]) + "</span>"; temp +="<a class=\"pm\" href=\"/id0P\">+</a><br>"; //ID1 offset temp +="ID1<br>"; temp +="<a class=\"pm\" href=\"/id1M\">-</a>"; temp +="<span>" + String(offset[1]) + "</span>"; temp +="<a class=\"pm\" href=\"/id1P\">+</a><br>"; //ID2 offset temp +="ID2<br>"; temp +="<a class=\"pm\" href=\"/id2M\">-</a>"; temp +="<span>" + String(offset[2]) + "</span>"; temp +="<a class=\"pm\" href=\"/id2P\">+</a><br>"; //ID3 offset temp +="ID3<br>"; temp +="<a class=\"pm\" href=\"/id3M\">-</a>"; temp +="<span>" + String(offset[3]) + "</span>"; temp +="<a class=\"pm\" href=\"/id3P\">+</a><br>"; //ID4 offset temp +="ID4<br>"; temp +="<a class=\"pm\" href=\"/id4M\">-</a>"; temp +="<span>" + String(offset[4]) + "</span>"; temp +="<a class=\"pm\" href=\"/id4P\">+</a><br>"; //ID5 offset temp +="ID5<br>"; temp +="<a class=\"pm\" href=\"/id5M\">-</a>"; temp +="<span>" + String(offset[5]) + "</span>"; temp +="<a class=\"pm\" href=\"/id5P\">+</a><br>"; //ID6 offset temp +="ID6<br>"; temp +="<a class=\"pm\" href=\"/id6M\">-</a>"; temp +="<span>" + String(offset[6]) + "</span>"; temp +="<a class=\"pm\" href=\"/id6P\">+</a><br>"; //ID7 offset temp +="ID7<br>"; temp +="<a class=\"pm\" href=\"/id7M\">-</a>"; temp +="<span>" + String(offset[7]) + "</span>"; temp +="<a class=\"pm\" href=\"/id7P\">+</a><br>"; temp +="</div>"; temp +="</body>"; server.send(200, "text/HTML", temp); } void handleId0M() { if(offset[0] > -511){ offset[0] -= 2; preferences.putInt("offset0", offset[0]); } handleRoot(); } void handleId0P() { if(offset[0] < 511){ offset[0] += 2; preferences.putInt("offset0", offset[0]); } handleRoot(); } void handleId1M() { if(offset[1] > -511){ offset[1] -= 2; preferences.putInt("offset1", offset[1]); } handleRoot(); } void handleId1P() { if(offset[1] < 511){ offset[1] += 2; preferences.putInt("offset1", offset[1]); } handleRoot(); } void handleId2M() { if(offset[2] > -511){ offset[2] -= 2; preferences.putInt("offset2", offset[2]); } handleRoot(); } void handleId2P() { if(offset[2] < 511){ offset[2] += 2; preferences.putInt("offset2", offset[2]); } handleRoot(); } void handleId3M() { if(offset[3] > -511){ offset[3] -= 2; preferences.putInt("offset3", offset[3]); } handleRoot(); } void handleId3P() { if(offset[3] < 511){ offset[3] += 2; preferences.putInt("offset3", offset[3]); } handleRoot(); } void handleId4M() { if(offset[4] > -511){ offset[4] -= 2; preferences.putInt("offset4", offset[4]); } handleRoot(); } void handleId4P() { if(offset[4] < 511){ offset[4] += 2; preferences.putInt("offset4", offset[4]); } handleRoot(); } void handleId5M() { if(offset[5] > -511){ offset[5] -= 2; preferences.putInt("offset5", offset[5]); } handleRoot(); } void handleId5P() { if(offset[5] < 511){ offset[5] += 2; preferences.putInt("offset5", offset[5]); } handleRoot(); } void handleId6M() { if(offset[6] > -511){ offset[6] -= 2; preferences.putInt("offset6", offset[6]); } handleRoot(); } void handleId6P() { if(offset[6] < 511){ offset[6] += 2; preferences.putInt("offset6", offset[6]); } handleRoot(); } void handleId7M() { if(offset[7] > -511){ offset[7] -= 2; preferences.putInt("offset7", offset[7]); } handleRoot(); } void handleId7P() { if(offset[7] < 511){ offset[7] += 2; preferences.putInt("offset7", offset[7]); } handleRoot(); } void setup() { M5.begin(true, true, true); //SerialEnable, bool I2CEnable, DisplayEnable Serial1.begin(1000000, SERIAL_8N1, -1, 19); //parameter memory preferences.begin("parameter", false); offset[0] =preferences.getInt("offset0", offset[0]); offset[1] =preferences.getInt("offset1", offset[1]); offset[2] =preferences.getInt("offset2", offset[2]); offset[3] =preferences.getInt("offset3", offset[3]); offset[4] =preferences.getInt("offset4", offset[4]); offset[5] =preferences.getInt("offset5", offset[5]); offset[6] =preferences.getInt("offset6", offset[6]); offset[7] =preferences.getInt("offset7", offset[7]); WiFi.softAP(ssid, pass); delay(100); WiFi.softAPConfig(ip, ip, subnet); IPAddress myIP = WiFi.softAPIP(); server.on("/", handleRoot); server.on("/id0M", handleId0M); server.on("/id0P", handleId0P); server.on("/id1M", handleId1M); server.on("/id1P", handleId1P); server.on("/id2M", handleId2M); server.on("/id2P", handleId2P); server.on("/id3M", handleId3M); server.on("/id3P", handleId3P); server.on("/id4M", handleId4M); server.on("/id4P", handleId4P); server.on("/id5M", handleId5M); server.on("/id5P", handleId5P); server.on("/id6M", handleId6M); server.on("/id6P", handleId6P); server.on("/id7M", handleId7M); server.on("/id7P", handleId7P); server.begin(); } void loop() { servo_write(0, 0); servo_write(1, 0); servo_write(2, 0); servo_write(3, 0); servo_write(4, 0); servo_write(5, 0); servo_write(6, 0); servo_write(7, 0); server.handleClient(); delay(300); } //参考 https://qiita.com/Ninagawa123/items/7b79c5f5117dd1470ac9 void scs_moveToPos(byte id, int position) { // コマンドパケットを作成 byte message[13]; message[0] = 0xFF; // ヘッダ message[1] = 0xFF; // ヘッダ message[2] = id; // サーボID message[3] = 9; // パケットデータ長 message[4] = 3; // コマンド(3は書き込み命令) message[5] = 42; // レジスタ先頭番号 message[6] = (position >> 8) & 0xFF; // 位置情報バイト上位 message[7] = position & 0xFF; // 位置情報バイト下位 message[8] = 0x00; // 時間情報バイト下位 message[9] = 0x00; // 時間情報バイト上位 message[10] = 0x00; // 速度情報バイト下位 message[11] = 0x00; // 速度情報バイト上位 // チェックサムの計算 byte checksum = 0; for (int i = 2; i < 12; i++) { checksum += message[i]; } message[12] = ~checksum; // チェックサム // コマンドパケットを送信 for (int i = 0; i < 13; i++) { Serial1.write(message[i]); } } void servo_write(int ch, float ang){ int sig = 511 + offset[ch] + int((512.0 / 150.0) * ang); scs_moveToPos(ch, sig); } |
使用ライブラリ
ボードマネージャ
ESP32 バージョン 2.0.15
M5Stack バージョン 2.1.1
ライブラリマネージャ
M5ATOM バージョン 0.1.2
サーボ通信用ライブラリ
ESP32のGPIOを用いてFeetechのシリアルサーボを簡単に駆動できるライブラリです。
サーボからの受信はできませんがUART信号変換基板を使用せずに直接信号送信が可能です。
https://qiita.com/Ninagawa123/items/7b79c5f5117dd1470ac9
コード説明
L. 8~12 WiFi APモード用設定。SSIDやパスワード、IPを指定 (それぞれ任意)。
L. 18 Preferencesライブラリを使用して調整値をフラッシュに記憶して電源OFF後も保持します。
L. 26~253ブラウザアプリ表示設定
APモード接続時の各サーボのオフセット値設定用の表示を記述しています。
オフセット調整は±2 分解能で実施できるようにしています。
L. 257~306 setup関数
UART1:送信ピンGPIO19、ボーレート1Mbpsに設定 (L. 260)
アプリで設定した各オフセット値はPreferences機能でフラッシュに記録します。
電源起動時にフラッシュに記録されたオフセット値を読み出します (L. 267~274)
WiFiとブラウザアプリ用のハンドラを設定 (L. 277~305)
L. 309~322 loop関数
servo_write() 関数でオフセット値を加味して各サーボの角度を0°指定
L. 326~353 サーボ駆動用 scs_moveToPos()関数
参考:Feetechのサーボをマイコンから直接動かす
L. 356~359 servo_write() 関数
サーボIDと角度を指定する。scs_moveToPos()関数を用いてオフセット値を加算して信号設定。
調整用アプリ画面
- 調整用アプリをATOM Matrixに書き込んで、スマホもしくはPCのWiFi接続設定でSSID ”servoOffset”に接続
パスワード:password
- ブラウザで”192.168.55.28”にアクセス
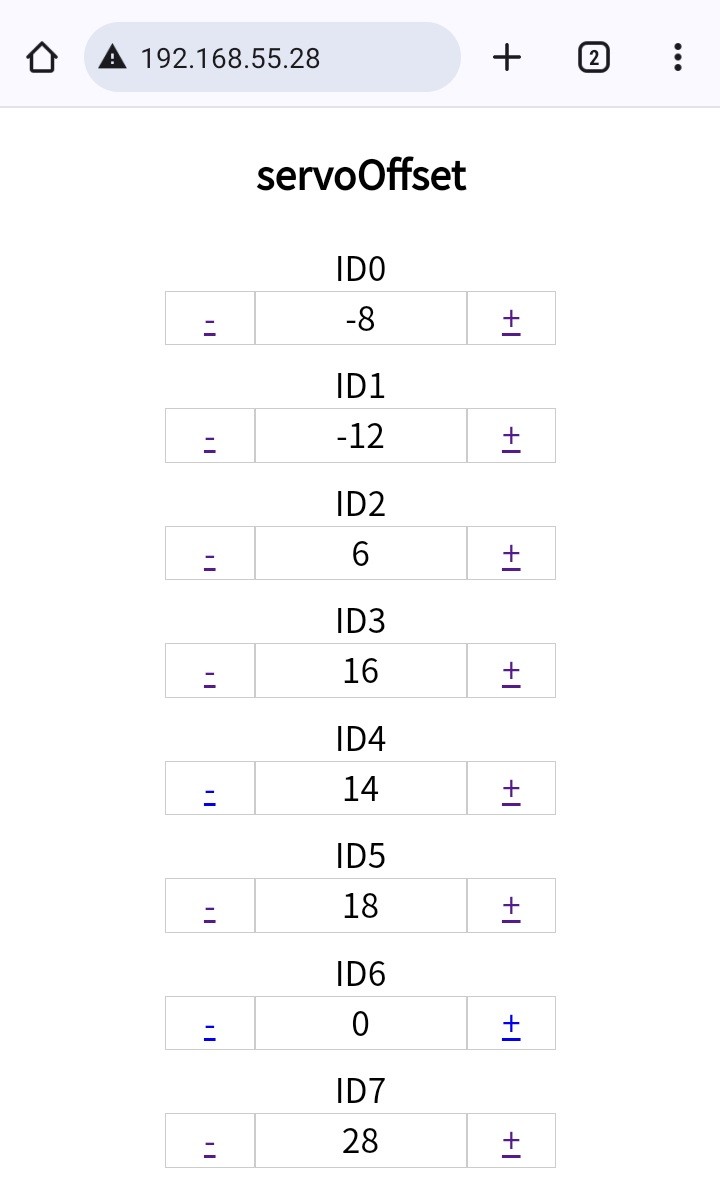
“-“、”+”をクリックしてサーボが水平になるようにオフセット値を増減させます。
最終値を控えて、本動作コードにオフセット値として書き込みます。
調整アプリ制作動画
以下はサーボオフセット調整アプリの制作から実際に調整するところまでの様子を配信したアーカイブ動画です。
宜しければ参考にしてください。
Arduinoコード
4脚ロボット動作コードです。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 393 394 395 396 397 398 399 400 401 402 403 404 405 406 407 408 409 410 411 412 413 414 415 416 417 418 419 420 421 422 423 424 425 426 427 428 429 430 431 432 433 434 435 436 437 438 439 440 441 442 443 444 445 446 447 448 449 450 451 452 453 454 455 456 457 458 459 460 461 462 463 464 465 466 467 468 469 470 471 472 473 474 475 476 477 478 479 480 481 482 483 484 485 486 487 488 489 490 491 492 493 494 495 496 497 498 499 500 501 502 503 504 505 506 507 508 509 510 511 512 513 514 515 516 517 518 519 520 521 522 523 524 525 526 527 528 529 530 531 532 533 534 535 536 537 538 539 540 541 542 543 544 545 546 547 548 549 550 551 552 553 554 555 556 557 558 559 560 561 562 563 564 565 566 567 568 569 570 571 572 573 574 575 576 577 578 579 580 581 582 583 584 585 586 587 588 589 590 591 592 593 594 595 596 597 598 599 600 601 602 603 604 605 606 607 608 609 610 611 612 613 614 615 616 617 618 619 620 621 622 623 624 625 626 627 628 629 630 631 632 633 634 635 636 637 638 639 640 641 642 643 644 645 646 647 648 649 650 651 652 653 654 655 656 657 658 659 660 661 662 663 664 665 666 667 668 669 670 671 672 673 674 675 676 677 678 679 680 681 682 683 684 685 686 687 688 689 690 691 692 693 694 695 696 697 698 699 700 701 702 703 704 705 706 707 708 709 710 711 712 713 714 715 716 717 718 719 720 721 722 723 724 725 726 727 728 729 730 731 732 733 734 735 736 737 738 739 740 741 742 743 744 745 746 747 748 749 750 751 752 753 754 755 756 757 758 759 760 761 762 763 764 765 766 767 768 769 770 771 772 773 774 775 776 777 778 779 780 781 782 783 784 785 786 787 788 789 790 791 792 793 794 795 796 797 798 799 800 801 802 803 804 805 806 807 808 809 810 811 812 813 814 815 816 817 818 819 820 821 822 823 824 825 826 827 828 829 830 831 832 833 834 835 836 837 838 839 840 841 842 843 844 845 846 847 848 849 850 851 852 853 854 855 856 857 858 859 860 861 862 863 864 865 866 867 868 869 870 871 872 873 874 875 876 877 878 879 880 881 882 883 884 885 886 887 888 889 890 891 892 893 894 895 896 897 898 899 900 901 902 903 904 905 906 907 908 909 910 911 912 913 914 915 916 917 918 919 920 921 922 923 924 925 926 927 928 929 930 931 932 933 934 935 936 937 938 939 940 941 942 943 944 945 946 947 948 949 950 951 952 953 954 955 956 957 958 959 960 961 962 963 964 965 966 967 968 969 970 971 972 973 974 975 976 977 978 979 980 981 982 983 984 985 986 987 988 989 990 991 992 993 994 995 996 997 998 999 1000 1001 1002 1003 1004 1005 1006 1007 1008 1009 1010 1011 1012 1013 1014 1015 1016 1017 1018 1019 1020 1021 1022 1023 1024 1025 1026 1027 1028 1029 1030 1031 1032 1033 1034 1035 1036 1037 1038 1039 1040 1041 1042 1043 1044 1045 1046 1047 1048 1049 1050 1051 1052 1053 1054 1055 1056 1057 1058 1059 1060 1061 1062 1063 1064 1065 1066 1067 1068 1069 1070 1071 1072 1073 1074 1075 1076 1077 1078 1079 1080 1081 1082 1083 1084 1085 1086 1087 1088 1089 1090 1091 1092 1093 1094 1095 1096 1097 1098 1099 1100 1101 1102 1103 1104 1105 1106 1107 1108 1109 1110 1111 1112 1113 1114 1115 1116 1117 1118 1119 1120 1121 1122 1123 1124 1125 1126 1127 1128 1129 1130 1131 1132 1133 1134 1135 1136 1137 1138 1139 1140 1141 1142 1143 1144 1145 1146 1147 1148 1149 1150 1151 1152 1153 1154 1155 1156 1157 1158 1159 1160 1161 1162 1163 1164 1165 1166 1167 1168 1169 1170 1171 1172 1173 1174 1175 |
#include <M5Atom.h> #include <Preferences.h> #include <Kalman.h> #include <WiFi.h> #include <WebServer.h> WebServer server(80); const char ssid[] = "robot0009"; // SSID const char pass[] = "password"; // password const IPAddress ip(192, 168, 55, 27); // IP address const IPAddress subnet(255, 255, 255, 0); #define led_pin 27 #define NUM_LEDS 25 Preferences preferences; // ID 0 1 2 3 4 5 6 7 int offset[] = {-8, -12, 6, 22, 20, 18, 0, 28}; //leg length float L1 = 50.0, L2 = 65.0;//unit:mm Kalman kalmanX, kalmanY; float kalAngleX, kalAngleDotX, kalAngleY, kalAngleDotY; unsigned long oldTime = 0, loopTime, nowTime; float dt; float accX = 0, accY = 0, accZ = 0; float gyroX = 0, gyroY = 0, gyroZ = 0; float theta_X = 0.0, theta_Y = 0.0; float theta_Xdot = 0.0, theta_Ydot = 0.0; float hX, hY, hXpre, hYpre; int pos = 0; int Mode; #define L 1 #define R 2 #define Imu 3 #define Jump 4 #define Jump2 42 #define Step 5 #define Stretch 6 #define Advance 7 #define Back 8 #define Roll 9 String modeBtJump = "off"; String modeBtStep = "off"; String modeBtImu = "off"; String modeBtStretch = "off"; String modeBtAd = "off"; String modeBtBack = "off"; String modeBtL = "off"; String modeBtR = "off"; String modeBtRoll = "off"; //パラメータ //------------------------------------------------- float wakeUpAngle = -1.0; int period = 80, x = 60, height = 40, upHeight = 10, stride = 12; float Kp = 0.3, Kd = 0.3; //------------------------------------------------- //加速度センサから傾きデータ取得 [deg] void get_theta() { M5.IMU.getAccelData(&accX,&accY,&accZ); //傾斜角導出 単位はdeg theta_X = atan(accY / -accZ) * 57.29578f; theta_Y = -atan(-accX / -accZ) * 57.29578f; if(Mode != Jump2){ if(pos == 1 && accZ < -0.96) pos = 0; if(pos == 0 && accZ > 0.96) pos = 1; } } //Y軸 角速度取得 void get_gyro_data() { M5.IMU.getGyroData(&gyroX,&gyroY,&gyroZ); theta_Xdot = -gyroX; theta_Ydot = gyroY; } //browser void handleRoot() { String temp ="<!DOCTYPE html> \n<html lang=\"ja\">"; temp +="<head>"; temp +="<meta charset=\"utf-8\">"; temp +="<title>robot0009</title>"; temp +="<meta name=\"viewport\" content=\"width=device-width, initial-scale=1\">"; temp +="<style>"; temp +=".container{"; temp +=" margin: auto;"; temp +=" text-align: center;"; temp +=" font-size: 1.2rem;"; temp +="}"; temp +="span,.pm{"; temp +=" display: inline-block;"; temp +=" border: 1px solid #ccc;"; temp +=" width: 50px;"; temp +=" height: 30px;"; temp +=" vertical-align: middle;"; temp +=" margin-bottom: 8px;"; temp +="}"; temp +="span{"; temp +=" width: 120px;"; temp +="}"; temp +="button{"; temp +=" width: 100px;"; temp +=" height: 40px;"; temp +=" font-weight: bold;"; temp +=" margin-bottom: 8px;"; temp +="}"; temp +="button.on{ background:lime; color:white; }"; temp +=".column-3{ max-width:330px; margin:auto; text-align:center; display:flex; justify-content:space-between; flex-wrap:wrap; }"; temp +="</style>"; temp +="</head>"; temp +="<body>"; temp +="<div class=\"container\">"; temp +="<h3>robot0009</h3>"; //button temp +="<div class=\"column-3\">"; temp +="<button class=\"" + modeBtImu + "\" type=\"button\" ><a href=\"/imu\">IMU</a></button><br>"; temp +="<button class=\"" + modeBtAd + "\" type=\"button\" ><a href=\"/ad\">Advance</a></button><br>"; temp +="<button class=\"" + modeBtJump + "\" type=\"button\" ><a href=\"/Jump\">Jump</a></button><br>"; temp +="<button class=\"" + modeBtL + "\" type=\"button\" ><a href=\"/L\">L</a></button><br>"; temp +="<button class=\"" + modeBtStep + "\" type=\"button\" ><a href=\"/step\">Step</a></button><br>"; temp +="<button class=\"" + modeBtR + "\" type=\"button\" ><a href=\"/R\">R</a></button><br>"; temp +="<button class=\"" + modeBtStretch + "\" type=\"button\" ><a href=\"/stretch\">Stretch</a></button><br>"; temp +="<button class=\"" + modeBtBack + "\" type=\"button\" ><a href=\"/back\">Back</a></button><br>"; temp +="<button class=\"" + modeBtRoll + "\" type=\"button\" ><a href=\"/Roll\">Roll</a></button><br>"; temp +="</div>"; //wakeUpAngle temp +="wakeUpAngle (deg)<br>"; temp +="<a class=\"pm\" href=\"/wakeUpAngleM\">-</a>"; temp +="<span>" + String(wakeUpAngle) + "</span>"; temp +="<a class=\"pm\" href=\"/wakeUpAngleP\">+</a><br>"; //period temp +="period (msec)<br>"; temp +="<a class=\"pm\" href=\"/periodM\">-</a>"; temp +="<span>" + String(period) + "</span>"; temp +="<a class=\"pm\" href=\"/periodP\">+</a><br>"; //x temp +="x (mm)<br>"; temp +="<a class=\"pm\" href=\"/xM\">-</a>"; temp +="<span>" + String(x) + "</span>"; temp +="<a class=\"pm\" href=\"/xP\">+</a><br>"; //height temp +="height (mm)<br>"; temp +="<a class=\"pm\" href=\"/heightM\">-</a>"; temp +="<span>" + String(height) + "</span>"; temp +="<a class=\"pm\" href=\"/heightP\">+</a><br>"; //upHeight temp +="upHeight (mm)<br>"; temp +="<a class=\"pm\" href=\"/upHeightM\">-</a>"; temp +="<span>" + String(upHeight) + "</span>"; temp +="<a class=\"pm\" href=\"/upHeightP\">+</a><br>"; //stride temp +="stride (mm)<br>"; temp +="<a class=\"pm\" href=\"/strideM\">-</a>"; temp +="<span>" + String(stride) + "</span>"; temp +="<a class=\"pm\" href=\"/strideP\">+</a><br>"; //Kp temp +="Kp<br>"; temp +="<a class=\"pm\" href=\"/KpM\">-</a>"; temp +="<span>" + String(Kp) + "</span>"; temp +="<a class=\"pm\" href=\"/KpP\">+</a><br>"; //Kd temp +="Kd<br>"; temp +="<a class=\"pm\" href=\"/KdM\">-</a>"; temp +="<span>" + String(Kd) + "</span>"; temp +="<a class=\"pm\" href=\"/KdP\">+</a><br>"; temp +="</div>"; temp +="</body>"; server.send(200, "text/HTML", temp); } void handleL() { if(modeBtL == "off"){ modeBtL = "on"; modeBtR = "off"; modeBtJump = "off"; modeBtStep = "off"; modeBtStretch = "off"; modeBtAd = "off"; modeBtBack = "off"; modeBtImu = "off"; modeBtRoll = "off"; Mode = L; }else{ modeBtL = "off"; Mode = 0; } handleRoot(); } void handleR() { if(modeBtR == "off"){ modeBtL = "off"; modeBtR = "on"; modeBtJump = "off"; modeBtStep = "off"; modeBtStretch = "off"; modeBtAd = "off"; modeBtBack = "off"; modeBtImu = "off"; modeBtRoll = "off"; Mode = R; }else{ modeBtR = "off"; Mode = 0; } handleRoot(); } void handleJump() { if(modeBtJump == "off" && pos == 0){ modeBtL = "off"; modeBtR = "off"; modeBtJump = "on"; modeBtStep = "off"; modeBtStretch = "off"; modeBtAd = "off"; modeBtBack = "off"; modeBtImu = "off"; modeBtRoll = "off"; Mode = Jump; }else{ modeBtJump = "off"; Mode = 0; } handleRoot(); } void handleStep() { if(modeBtStep == "off"){ modeBtL = "off"; modeBtR = "off"; modeBtJump = "off"; modeBtStep = "on"; modeBtStretch = "off"; modeBtAd = "off"; modeBtBack = "off"; modeBtImu = "off"; modeBtRoll = "off"; Mode = Step; }else{ modeBtStep = "off"; Mode = 0; } handleRoot(); } void handleImu() { if(modeBtImu == "off"){ modeBtL = "off"; modeBtR = "off"; modeBtJump = "off"; modeBtStep = "off"; modeBtStretch = "off"; modeBtAd = "off"; modeBtBack = "off"; modeBtImu = "on"; modeBtRoll = "off"; Mode = Imu; }else{ modeBtImu = "off"; Mode = 0; } handleRoot(); } void handleStretch() { if(modeBtStretch == "off"){ modeBtL = "off"; modeBtR = "off"; modeBtJump = "off"; modeBtStep = "off"; modeBtStretch = "on"; modeBtAd = "off"; modeBtBack = "off"; modeBtImu = "off"; modeBtRoll = "off"; Mode = Stretch; }else{ modeBtStretch = "off"; Mode = 0; } handleRoot(); } void handleAd() { if(modeBtAd == "off"){ modeBtL = "off"; modeBtR = "off"; modeBtJump = "off"; modeBtStep = "off"; modeBtStretch = "off"; modeBtAd = "on"; modeBtBack = "off"; modeBtImu = "off"; modeBtRoll = "off"; Mode = Advance; }else{ modeBtAd = "off"; Mode = 0; } handleRoot(); } void handleBack() { if(modeBtBack == "off"){ modeBtL = "off"; modeBtR = "off"; modeBtJump = "off"; modeBtStep = "off"; modeBtStretch = "off"; modeBtAd = "off"; modeBtBack = "on"; modeBtImu = "off"; modeBtRoll = "off"; Mode = Back; }else{ modeBtBack = "off"; Mode = 0; } handleRoot(); } void handleRoll() { if(modeBtRoll == "off"){ modeBtL = "off"; modeBtR = "off"; modeBtJump = "off"; modeBtStep = "off"; modeBtStretch = "off"; modeBtAd = "off"; modeBtBack = "off"; modeBtImu = "off"; modeBtRoll = "on"; Mode = Roll; }else{ modeBtRoll = "off"; Mode = 0; } handleRoot(); } void handleWakeUpAngleM() { if(wakeUpAngle > -90.0){ wakeUpAngle -= 0.5; preferences.putFloat("wakeUpAngle", wakeUpAngle); } handleRoot(); } void handleWakeUpAngleP() { if(wakeUpAngle <= 90.0){ wakeUpAngle += 0.5; preferences.putFloat("wakeUpAngle", wakeUpAngle); } handleRoot(); } void handleKpM() { if(Kp > 0){ Kp -= 0.1; preferences.putFloat("Kp", Kp); } handleRoot(); } void handleKpP() { if(Kp <= 10){ Kp += 0.1; preferences.putFloat("Kp", Kp); } handleRoot(); } void handleKdM() { if(Kd > 0){ Kd -= 0.1; preferences.putFloat("Kd", Kd); } handleRoot(); } void handleKdP() { if(Kd <= 10){ Kd += 0.1; preferences.putFloat("Kd", Kd); } handleRoot(); } void handlePeriodM() { if(period > 5){ period -= 5; preferences.putInt("period", period); } handleRoot(); } void handlePeriodP() { if(period <= 3000){ period += 5; preferences.putInt("period", period); } handleRoot(); } void handlexM() { if(x > -615){ x -= 5; preferences.putInt("x", x); } handleRoot(); } void handlexP() { if(x < 515){ x += 5; preferences.putInt("x", x); } handleRoot(); } void handleHeightM() { if(height > -120){ height -= 5; preferences.putInt("height", height); } handleRoot(); } void handleHeightP() { if(height <= 120){ height += 5; preferences.putInt("height", height); } handleRoot(); } void handleUpHeightM() { if(upHeight > 0){ upHeight -= 2; preferences.putInt("upHeight", upHeight); } handleRoot(); } void handleUpHeightP() { if(upHeight <= 500){ upHeight += 2; preferences.putInt("upHeight", upHeight); } handleRoot(); } void handleStrideM() { if(stride > 0){ stride -= 2; preferences.putInt("stride", stride); } handleRoot(); } void handleStrideP() { if(stride <= 40){ stride += 2; preferences.putInt("stride", stride); } handleRoot(); } //Core0 void browser(void *pvParameters) { M5.dis.setBrightness(20); for (;;){ server.handleClient(); //LED表示 M5.dis.clear(); if(kalAngleX > 20.0){ for(int i = 0; i < 5; i++){ M5.dis.drawpix(i, 0xff0000); } }else if(kalAngleX <= 20.0 && kalAngleX > 12.0){ for(int i = 0; i < 5; i++){ M5.dis.drawpix(i, 0x0000ff); } }else if(kalAngleX <= 12.0 && kalAngleX > 4.0){ for(int i = 0; i < 5; i++){ M5.dis.drawpix(i + 5, 0x0000ff); } }else if(kalAngleX <= 4.0 && kalAngleX > 1.0){ for(int i = 0; i < 5; i++){ M5.dis.drawpix(i + 10, 0x0000ff); } }else if(abs(kalAngleX) <= 1.0){ for(int i = 0; i < 5; i++){ M5.dis.drawpix(i + 10, 0x00ff00); } }else if(kalAngleX >= -4.0 && kalAngleX < -1.0){ for(int i = 0; i < 5; i++){ M5.dis.drawpix(i + 10, 0x0000ff); } }else if(kalAngleX >= -12.0 && kalAngleX < -4.0){ for(int i = 0; i < 5; i++){ M5.dis.drawpix(i + 15, 0x0000ff); } }else if(kalAngleX >= -20.0 && kalAngleX < -12.0){ for(int i = 0; i < 5; i++){ M5.dis.drawpix(i + 20, 0x0000ff); } }else if(kalAngleX < -20.0){ for(int i = 0; i < 5; i++){ M5.dis.drawpix(i + 20, 0xff0000); } } if(kalAngleY > 20.0){ for(int i = 0; i < 5; i++){ M5.dis.drawpix(i * 5, 0xff0000); } }else if(kalAngleY <= 20.0 && kalAngleY > 12.0){ for(int i = 0; i < 5; i++){ M5.dis.drawpix(i * 5, 0x0000ff); } }else if(kalAngleY <= 12.0 && kalAngleY > 4.0){ for(int i = 0; i < 5; i++){ M5.dis.drawpix(i * 5 + 1, 0x0000ff); } }else if(kalAngleY <= 4.0 && kalAngleY > 1.0){ for(int i = 0; i < 5; i++){ M5.dis.drawpix(i * 5 + 2, 0x0000ff); } }else if(abs(kalAngleY) <= 1.0){ for(int i = 0; i < 5; i++){ M5.dis.drawpix(i * 5 + 2, 0x00ff00); } }else if(kalAngleY >= -4.0 && kalAngleY < -1.0){ for(int i = 0; i < 5; i++){ M5.dis.drawpix(i * 5 + 2, 0x0000ff); } }else if(kalAngleY >= -12.0 && kalAngleY < -4.0){ for(int i = 0; i < 5; i++){ M5.dis.drawpix(i * 5 + 3, 0x0000ff); } }else if(kalAngleY >= -20.0 && kalAngleY < -12.0){ for(int i = 0; i < 5; i++){ M5.dis.drawpix(i * 5 + 4, 0x0000ff); } }else if(kalAngleY < -20.0){ for(int i = 0; i < 5; i++){ M5.dis.drawpix(i * 5 + 4, 0xff0000); } } delay(50); disableCore0WDT(); } } void setup() { M5.begin(true, true, true); //SerialEnable, bool I2CEnable, DisplayEnable Serial1.begin(1000000, SERIAL_8N1, -1, 19); M5.IMU.Init(); //フルスケールレンジ M5.IMU.SetAccelFsr(M5.IMU.AFS_2G); M5.IMU.SetGyroFsr(M5.IMU.GFS_250DPS); get_theta(); kalmanX.setAngle(theta_X); kalmanY.setAngle(theta_Y); delay(200); //parameter memory preferences.begin("parameter", false); wakeUpAngle = preferences.getFloat("wakeUpAngle", wakeUpAngle); Kp = preferences.getFloat("Kp", Kp); Kd = preferences.getFloat("Kd", Kd); period = preferences.getInt("period", period); x = preferences.getInt("x", x); height = preferences.getInt("height", height); upHeight = preferences.getInt("upHeight", upHeight); stride = preferences.getInt("stride", stride); WiFi.softAP(ssid, pass); delay(100); WiFi.softAPConfig(ip, ip, subnet); IPAddress myIP = WiFi.softAPIP(); server.on("/", handleRoot); server.on("/Jump", handleJump); server.on("/step", handleStep); server.on("/imu", handleImu); server.on("/stretch", handleStretch); server.on("/ad", handleAd); server.on("/back", handleBack); server.on("/L", handleL); server.on("/R", handleR); server.on("/Roll", handleRoll); server.on("/wakeUpAngleM", handleWakeUpAngleM); server.on("/wakeUpAngleP", handleWakeUpAngleP); server.on("/KpM", handleKpM); server.on("/KpP", handleKpP); server.on("/KdM", handleKdM); server.on("/KdP", handleKdP); server.on("/periodM", handlePeriodM); server.on("/periodP", handlePeriodP); server.on("/xM", handlexM); server.on("/xP", handlexP); server.on("/heightM", handleHeightM); server.on("/heightP", handleHeightP); server.on("/upHeightM", handleUpHeightM); server.on("/upHeightP", handleUpHeightP); server.on("/strideM", handleStrideM); server.on("/strideP", handleStrideP); server.begin(); //browser task xTaskCreatePinnedToCore( browser , "browser" // A name just for humans , 4096 // This stack size can be checked & adjusted by reading the Stack Highwater , NULL , 1 // Priority, with 3 (configMAX_PRIORITIES - 1) being the highest, and 0 being the lowest. , NULL , 0); } void loop() { nowTime = micros(); loopTime = nowTime - oldTime; oldTime = nowTime; dt = (float)loopTime / 1000000.0; //sec get_theta(); get_gyro_data(); //カルマンフィルタ 姿勢 傾き kalAngleX = kalmanX.getAngle(theta_X, theta_Xdot, dt); kalAngleY = kalmanY.getAngle(theta_Y, theta_Ydot, dt); //カルマンフィルタ 姿勢 角速度 kalAngleDotX = kalmanX.getRate(); kalAngleDotY = kalmanY.getRate(); //Serial.println(kalAngleX); if(Mode == Jump){ //ジャンプ fRIK(20, 35); fLIK(20, 35); rLIK(-25, 95); rRIK(-25, 95); delay(500); fRIK(-35, 100); fLIK(-35, 100); delay(160); rRIK(107, -42); rLIK(107, -42); fRIK(-70, 90); fLIK(-70, 90); delay(100); rRIK(80, 30); rLIK(80, 30); Mode = Jump2; fRIK(-85, 40); fLIK(-85, 40); }else if(Mode == Jump2){ if(kalAngleX < 0.0 && kalAngleX > wakeUpAngle){ fRIK(60, 40); fLIK(60, 40); rRIK(60, 40); rLIK(60, 40); Mode = 0; } }else if(Mode == Stretch){ //屈伸 float tim,tt; unsigned long time_mSt= millis(); tim=0; while(tim<period * 8){ tim=millis()-time_mSt; tt=float(tim * 2 * PI / (period * 8)); fRIK(x, height + upHeight * sin(tt)); fLIK(x, height + upHeight * sin(tt)); rLIK(x, height + upHeight * sin(tt)); rRIK(x, height + upHeight * sin(tt)); } }else if(Mode == Step){ //足踏み float tim,tt; unsigned long time_mSt= millis(); tim=0; while(tim<period){ tim=millis()-time_mSt; tt=float(tim * PI / 2 / period); fRIK(x, height + upHeight * (0.5 * cos(2*tt) - 0.5)); fLIK(x, height); rLIK(x, height + upHeight * (0.5 * cos(2*tt) - 0.5)); rRIK(x, height); } time_mSt= millis(); tim=0; while(tim<period){ tim=millis()-time_mSt; tt=float(tim * PI / 2 / period); fRIK(x, height + upHeight * (-0.5 * cos(2*tt) - 0.5)); fLIK(x, height); rLIK(x, height + upHeight * (-0.5 * cos(2*tt) - 0.5)); rRIK(x, height); } time_mSt= millis(); tim=0; while(tim<period){ tim=millis()-time_mSt; tt=float(tim * PI / 2 / period); fRIK(x, height); fLIK(x, height + upHeight * (0.5 * cos(2*tt) - 0.5)); rLIK(x, height); rRIK(x, height + upHeight * (0.5 * cos(2*tt) - 0.5)); } time_mSt= millis(); tim=0; while(tim<period){ tim=millis()-time_mSt; tt=float(tim * PI / 2 / period); fRIK(x, height); fLIK(x, height + upHeight * (-0.5 * cos(2*tt) - 0.5)); rLIK(x, height); rRIK(x, height + upHeight * (-0.5 * cos(2*tt) - 0.5)); } }else if(Mode == Advance){ //前進 float tim,tt; unsigned long time_mSt= millis(); tim=0; while(tim<period){ tim=millis()-time_mSt; tt=float(tim * PI / 2 / period); fRIK(x - stride * cos(tt), height + upHeight * (0.5 * cos(2*tt) - 0.5)); fLIK(x + stride * cos(tt), height); rLIK(x + stride * cos(tt), height + upHeight * (0.5 * cos(2*tt) - 0.5)); rRIK(x - stride * cos(tt), height); } time_mSt= millis(); tim=0; while(tim<period){ tim=millis()-time_mSt; tt=float(tim * PI / 2 / period); fRIK(x + stride * sin(tt), height + upHeight * (-0.5 * cos(2*tt) - 0.5)); fLIK(x - stride * sin(tt), height); rLIK(x - stride * sin(tt), height + upHeight * (-0.5 * cos(2*tt) - 0.5)); rRIK(x + stride * sin(tt), height); } time_mSt= millis(); tim=0; while(tim<period){ tim=millis()-time_mSt; tt=float(tim * PI / 2 / period); fRIK(x + stride * cos(tt), height); fLIK(x - stride * cos(tt), height + upHeight * (0.5 * cos(2*tt) - 0.5)); rLIK(x - stride * cos(tt), height); rRIK(x + stride * cos(tt), height + upHeight * (0.5 * cos(2*tt) - 0.5)); } time_mSt= millis(); tim=0; while(tim<period){ tim=millis()-time_mSt; tt=float(tim * PI / 2 / period); fRIK(x - stride * sin(tt), height); fLIK(x + stride * sin(tt), height + upHeight * (-0.5 * cos(2*tt) - 0.5)); rLIK(x + stride * sin(tt), height); rRIK(x - stride * sin(tt), height + upHeight * (-0.5 * cos(2*tt) - 0.5)); } }else if(Mode == Back){ //後進 float tim,tt; unsigned long time_mSt= millis(); tim=0; while(tim<period){ tim=millis()-time_mSt; tt=float(tim * PI / 2 / period); fRIK(x + stride * cos(tt), height + upHeight * (0.5 * cos(2*tt) - 0.5)); fLIK(x - stride * cos(tt), height); rLIK(x - stride * cos(tt), height + upHeight * (0.5 * cos(2*tt) - 0.5)); rRIK(x + stride * cos(tt), height); } time_mSt= millis(); tim=0; while(tim<period){ tim=millis()-time_mSt; tt=float(tim * PI / 2 / period); fRIK(x - stride * sin(tt), height + upHeight * (-0.5 * cos(2*tt) - 0.5)); fLIK(x + stride * sin(tt), height); rLIK(x + stride * sin(tt), height + upHeight * (-0.5 * cos(2*tt) - 0.5)); rRIK(x - stride * sin(tt), height); } time_mSt= millis(); tim=0; while(tim<period){ tim=millis()-time_mSt; tt=float(tim * PI / 2 / period); fRIK(x - stride * cos(tt), height); fLIK(x + stride * cos(tt), height + upHeight * (0.5 * cos(2*tt) - 0.5)); rLIK(x + stride * cos(tt), height); rRIK(x - stride * cos(tt), height + upHeight * (0.5 * cos(2*tt) - 0.5)); } time_mSt= millis(); tim=0; while(tim<period){ tim=millis()-time_mSt; tt=float(tim * PI / 2 / period); fRIK(x + stride * sin(tt), height); fLIK(x - stride * sin(tt), height + upHeight * (-0.5 * cos(2*tt) - 0.5)); rLIK(x - stride * sin(tt), height); rRIK(x + stride * sin(tt), height + upHeight * (-0.5 * cos(2*tt) - 0.5)); } }else if(Mode == R){ //R float tim,tt; unsigned long time_mSt= millis(); tim=0; while(tim<period){ tim=millis()-time_mSt; tt=float(tim * PI / 2 / period); fRIK(10, 40 + 10 * (0.5 * cos(2*tt) - 0.5)); fLIK(10 + 10 * cos(tt), 40); rLIK(10 + 10 * cos(tt), 40 + 10 * (0.5 * cos(2*tt) - 0.5)); rRIK(10, 40); } time_mSt= millis(); tim=0; while(tim<period){ tim=millis()-time_mSt; tt=float(tim * PI / 2 / period); fRIK(10, 40 + 10 * (-0.5 * cos(2*tt) - 0.5)); fLIK(10 - 10 * sin(tt), 40); rLIK(10 - 10 * sin(tt), 40 + 10 *(-0.5 * cos(2*tt) - 0.5)); rRIK(10, 40); } time_mSt= millis(); tim=0; while(tim<period){ tim=millis()-time_mSt; tt=float(tim * PI / 2 / period); fRIK(10, 40); fLIK(10 - 10 * cos(tt), 40 + 10 * (0.5 * cos(2*tt) - 0.5)); rLIK(10 - 10 * cos(tt), 40); rRIK(10, 40 + 10 * (0.5 * cos(2*tt) - 0.5)); } time_mSt= millis(); tim=0; while(tim<period){ tim=millis()-time_mSt; tt=float(tim * PI / 2 / period); fRIK(10, 40); fLIK(10 + 10 * sin(tt), 40 + 10 * (-0.5 * cos(2*tt) - 0.5)); rLIK(10 + 10 * sin(tt), 40); rRIK(10, 40 + 10 * (-0.5 * cos(2*tt) - 0.5)); } }else if(Mode == L){ //L float tim,tt; unsigned long time_mSt= millis(); tim=0; while(tim<period){ tim=millis()-time_mSt; tt=float(tim * PI / 2 / period); fRIK(10 - 10 * cos(tt), 40 + 10 * (0.5 * cos(2*tt) - 0.5)); fLIK(10, 40); rLIK(10, 40 + 10 * (0.5 * cos(2*tt) - 0.5)); rRIK(10 - 10 * cos(tt), 40); } time_mSt= millis(); tim=0; while(tim<period){ tim=millis()-time_mSt; tt=float(tim * PI / 2 / period); fRIK(10 + 10 * sin(tt), 40 + 10 * (-0.5 * cos(2*tt) - 0.5)); fLIK(10, 40); rLIK(10, 40 + 10 *(-0.5 * cos(2*tt) - 0.5)); rRIK(10 + 10 * sin(tt), 40); } time_mSt= millis(); tim=0; while(tim<period){ tim=millis()-time_mSt; tt=float(tim * PI / 2 / period); fRIK(10 + 10 * cos(tt), 40); fLIK(10, 40 + 10 * (0.5 * cos(2*tt) - 0.5)); rLIK(10, 40); rRIK(10 + 10 * cos(tt), 40 + 10 * (0.5 * cos(2*tt) - 0.5)); } time_mSt= millis(); tim=0; while(tim<period){ tim=millis()-time_mSt; tt=float(tim * PI / 2 / period); fRIK(10 - 10 * sin(tt), 40); fLIK(10, 40 + 10 * (-0.5 * cos(2*tt) - 0.5)); rLIK(10, 40); rRIK(10 - 10 * sin(tt), 40 + 10 * (-0.5 * cos(2*tt) - 0.5)); } }else if(Mode == Roll){ //反転 fRIK(50, 30); fLIK(50, 30); rRIK(50, 30); rLIK(50, 30); delay(500); fRIK(10, 45); fLIK(10, 45); rRIK(0, 80); rLIK(0, 80); delay(500); fRIK(10, 90); fLIK(10, 90); delay(150); fRIK(70, -50); fLIK(70, -50); delay(200); rRIK(70, -50); rLIK(70, -50); delay(600); Mode = 0; }else if(Mode == Imu){ hX = hXpre + Kp / 100.0 * kalAngleX + Kd / 100.0 * kalAngleDotX; hY = hYpre + Kp / 100.0 * kalAngleY + Kd / 100.0 * kalAngleDotY; hXpre = hX; hYpre = hY; if(pos == 1){ //反転時 hX = -hX; hY = -hY; } fRIK(x, height - hX + hY); fLIK(x, height - hX - hY); rRIK(x, height + hX + hY); rLIK(x, height + hX - hY); }else{ //初期姿勢 fRIK(x, height); fLIK(x, height); rRIK(x, height); rLIK(x, height); } } //参考 https://qiita.com/Ninagawa123/items/7b79c5f5117dd1470ac9 void scs_moveToPos(byte id, int position) { // コマンドパケットを作成 byte message[13]; message[0] = 0xFF; // ヘッダ message[1] = 0xFF; // ヘッダ message[2] = id; // サーボID message[3] = 9; // パケットデータ長 message[4] = 3; // コマンド(3は書き込み命令) message[5] = 42; // レジスタ先頭番号 message[6] = (position >> 8) & 0xFF; // 位置情報バイト上位 message[7] = position & 0xFF; // 位置情報バイト下位 message[8] = 0x00; // 時間情報バイト下位 message[9] = 0x00; // 時間情報バイト上位 message[10] = 0x00; // 速度情報バイト下位 message[11] = 0x00; // 速度情報バイト上位 // チェックサムの計算 byte checksum = 0; for (int i = 2; i < 12; i++) { checksum += message[i]; } message[12] = ~checksum; // チェックサム // コマンドパケットを送信 for (int i = 0; i < 13; i++) { Serial1.write(message[i]); } } void servo_write(int ch, float ang){ int sig = 511 + offset[ch] + int((512.0 / 150.0) * ang); scs_moveToPos(ch, sig); //delayMicroseconds(500); } //------------------------------------------- //IK //------------------------------------------- void fRIK(float x, float z){ float phi,ld, th1, th2; ld = sqrt(x*x + z*z); phi = atan2(x, z); th1 = 90.0 - (phi + acos((L1*L1 - L2*L2 +ld*ld)/(2*L1*ld))) * 180.0 / PI; th2 = acos((ld*ld - L1*L1 - L2*L2)/(2*L1*L2)) * 180.0 / PI; if(pos == 0){ th2 = constrain(th2, -120.0, 120.0); th1 = constrain(th1, -80.0, 120.0); servo_write(6, th2); servo_write(4, th1); }else{ th2 = constrain(th2, -120.0, 120.0); th1 = constrain(th1, -120.0, 80.0); servo_write(6, -th2); servo_write(4, -th1); } } void fLIK(float x, float z){ float phi,ld, th1, th2; ld = sqrt(x*x + z*z); phi = atan2(x, z); th1 = 90.0 - (phi + acos((L1*L1 - L2*L2 +ld*ld)/(2*L1*ld))) * 180.0 / PI; th2 = acos((ld*ld - L1*L1 - L2*L2)/(2*L1*L2)) * 180.0 / PI; if(pos == 0){ th2 = constrain(th2, -120.0, 120.0); th1 = constrain(th1, -80.0, 120.0); servo_write(7, -th2); servo_write(5, -th1); }else{ th2 = constrain(th2, -120.0, 120.0); th1 = constrain(th1, -120.0, 80.0); servo_write(7, th2); servo_write(5, th1); } } void rRIK(float x, float z){ float phi,ld, th1, th2; ld = sqrt(x*x + z*z); phi = atan2(x, z); th1 = 90.0 - (phi + acos((L1*L1 - L2*L2 +ld*ld)/(2*L1*ld))) * 180.0 / PI; th2 = acos((ld*ld - L1*L1 - L2*L2)/(2*L1*L2)) * 180.0 / PI; if(pos == 0){ th2 = constrain(th2, -120.0, 120.0); th1 = constrain(th1, -80.0, 120.0); servo_write(3, -th2); servo_write(1, -th1); }else{ th2 = constrain(th2, -120.0, 120.0); th1 = constrain(th1, -120.0, 80.0); servo_write(3, th2); servo_write(1, th1); } } void rLIK(float x, float z){ float phi,ld, th1, th2; ld = sqrt(x*x + z*z); phi = atan2(x, z); th1 = 90.0 - (phi + acos((L1*L1 - L2*L2 +ld*ld)/(2*L1*ld))) * 180.0 / PI; th2 = acos((ld*ld - L1*L1 - L2*L2)/(2*L1*L2)) * 180.0 / PI; if(pos == 0){ th2 = constrain(th2, -120.0, 120.0); th1 = constrain(th1, -80.0, 120.0); servo_write(2, th2); servo_write(0, th1); }else{ th2 = constrain(th2, -120.0, 120.0); th1 = constrain(th1, -120.0, 80.0); servo_write(2, -th2); servo_write(0, -th1); } } |
使用ライブラリ
ボードマネージャ
ESP32 バージョン 2.0.15
M5Stack バージョン 2.1.1
ライブラリマネージャ
M5ATOM バージョン 0.1.2
Kalman Filter Library バージョン1.0.2
https://github.com/TKJElectronics/KalmanFilter
サーボ通信用ライブラリ
ESP32のGPIOを用いてFeetechのシリアルサーボを簡単に駆動できるライブラリです。
サーボからの受信はできませんがUART信号変換基板を使用せずに直接信号送信が可能です。
https://qiita.com/Ninagawa123/items/7b79c5f5117dd1470ac9
コード説明
L. 8~12 WiFi APモード用設定。SSIDやパスワード、IPを指定 (それぞれ任意)。
L. 17 Preferencesライブラリを使用して調整値をフラッシュに記憶して電源OFF後も保持します。
L. 19 サーボオフセット調整アプリで導出したオフセット値をoffset[]配列に入力してください。
L. 23 本ロボットの足の長さです。逆運動学算出時に使用
大腿長さL1=50mm、下腿長さL2=65mm
L. 65~67 ロボット動作パラメータ初期値。アプリで可変
L. 72~82 加速度センサから傾斜角を取得する関数
ATOM Matrix内蔵のIMUセンサ(MPU6886)で検出した加速度からX軸とY軸の傾斜角を算出

また、Z軸の加速度によってロボットの反転状態を検出しています(pos)。
L. 85~89 角速度取得関数
IMUのX軸とY軸の角速度を使用
L. 93~515 ブラウザアプリ表示設定
APモード接続時の動作モード選択ボタンや各パラメータ設定用の表示を記述しています。
L. 519~608 core0動作
ATOM Matrix デュアルコアのcore0でディスプレイ表示とブラウザ表示とハンドラ処理を実行します。
機体のX軸とY軸の角度を以下の通りLEDインジケータ表示しています。
インジケータは動作モード実行時は機能しません。
・±1°以下:中心で緑表示
・±20°以上:赤表示
・その他:青表示
L. 611~694 setup関数
UART1:送信ピンGPIO19、ボーレート1Mbpsに設定 (L. 614)
慣性センサMPU6886のフルスケールレンジは以下で指定 (L. 619, 620)
・加速度:16bit ±2 g
・ジャイロ(角速度):16bit ±250 deg/sec
アプリで設定した各オフセット値はPreferences機能でフラッシュに記録します。
電源起動時にフラッシュに記録されたオフセット値を読み出します (L. 630~641)
WiFiとブラウザアプリ用のハンドラを設定 (L. 644~694)
L. 697~1044 loop関数
カルマンフィルタライブラリの関数を用いてセンサの姿勢角と角速度を算出 (L. 698~713)
バク転動作モード (L. 718~751)
後述の各足の逆運動学関数で足先の座標を指定してバク転動作を実現しています。
ATOM Matrixが上向きの姿勢の時のみ起動します。反転時は足移動の制約によりバク転できません。
着地後に伏せの姿勢に戻るタイミングを機体角度(X軸)をトリガにしており、パラメータwakeUpAngle(初期値 -1.0°)で調整可能です。
屈伸、足踏み、前後進、左右旋回動作モード (L. 753~995)
逆運動学関数で足先の座標を指定して各動作を実現しています。
足の上下、左右の移動にはそれぞれ正弦波形で緩やかに動かしています。
以下のパラメータで動作を調整可能です。
・period:動作の周期時間を指定
・x:各足先の前後位置指定
・height:各足先の付け根からの高さ位置指定
・upHeight:足上げ動作時の上げ量を指定
・stride:歩行時の歩幅指定
反転動作モード (L. 996~1021)
起上って反転動作します。
IMU動作モード (L. 1022~1037)
機体の傾きと角速度を検知して足の高さを制御し機体の水平を保ちます。
それぞれの足の高さをセンサのX軸、Y軸の角度と角速度に応じていわゆるPD制御しています。
応答はパラメータKp、Kdで調整できます。
初期姿勢 (L. 1038~1042)
動作モード以外は全足がパラメータx, heightで指定した位置で固定されます。
L. 1048~1075 サーボ駆動用 scs_moveToPos()関数
参考:Feetechのサーボをマイコンから直接動かす
L. 1078~1082 servo_write() 関数
サーボIDと角度を指定する。scs_moveToPos()関数を用いてオフセット値を加算して信号設定。
L. 1089~1175 逆運動学
関数 fRIK()、fLIK()、rRIK()、rLIK()でそれぞれの足先座標を指定して、サーボの角度を算出して駆動しています。
各足の付け根を原点として、高さと前後の座標を指定して以下の式で運動させます。
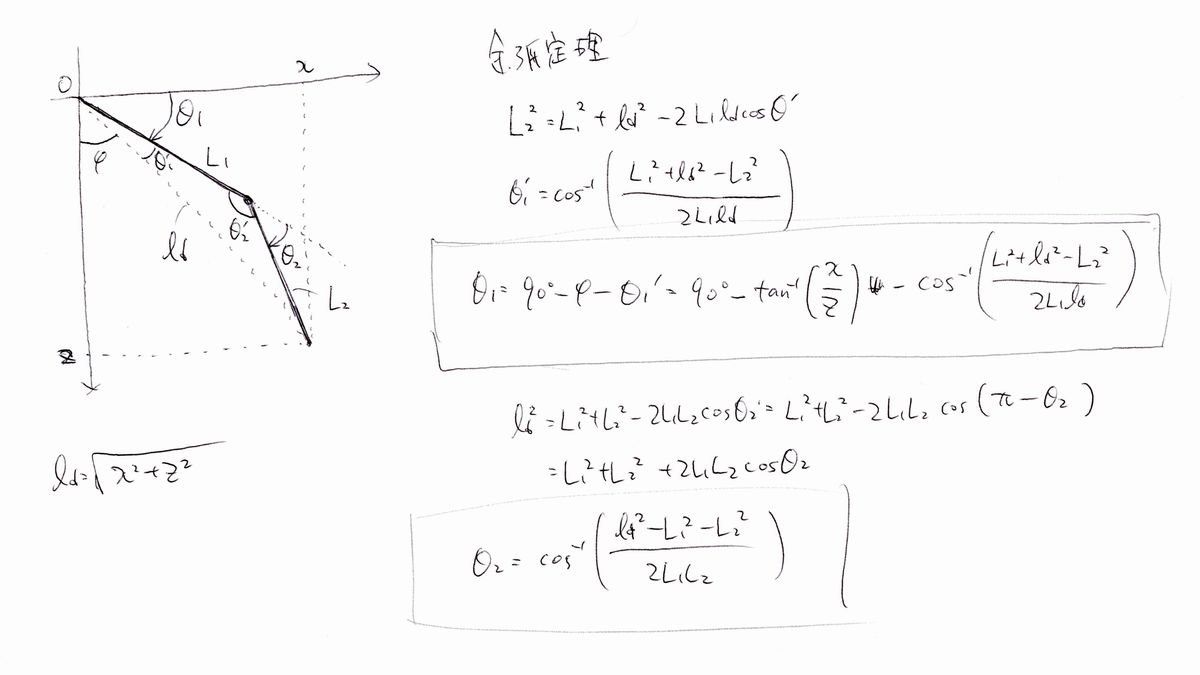
機体の反転時もサーボ指定角度の符号変えるだけで同じ座標指定シーケンスでの動作制御が可能となってます。
各サーボ角度は他のパーツなどに干渉しないようにconstrain関数で動作範囲角度を制限しております。
アプリ画面
-
調整用アプリをATOM Matrixに書き込んで、スマホもしくはPCのWiFi接続設定でSSID ”robot0009”に接続
パスワード:password -
ブラウザで”192.168.55.27”にアクセス
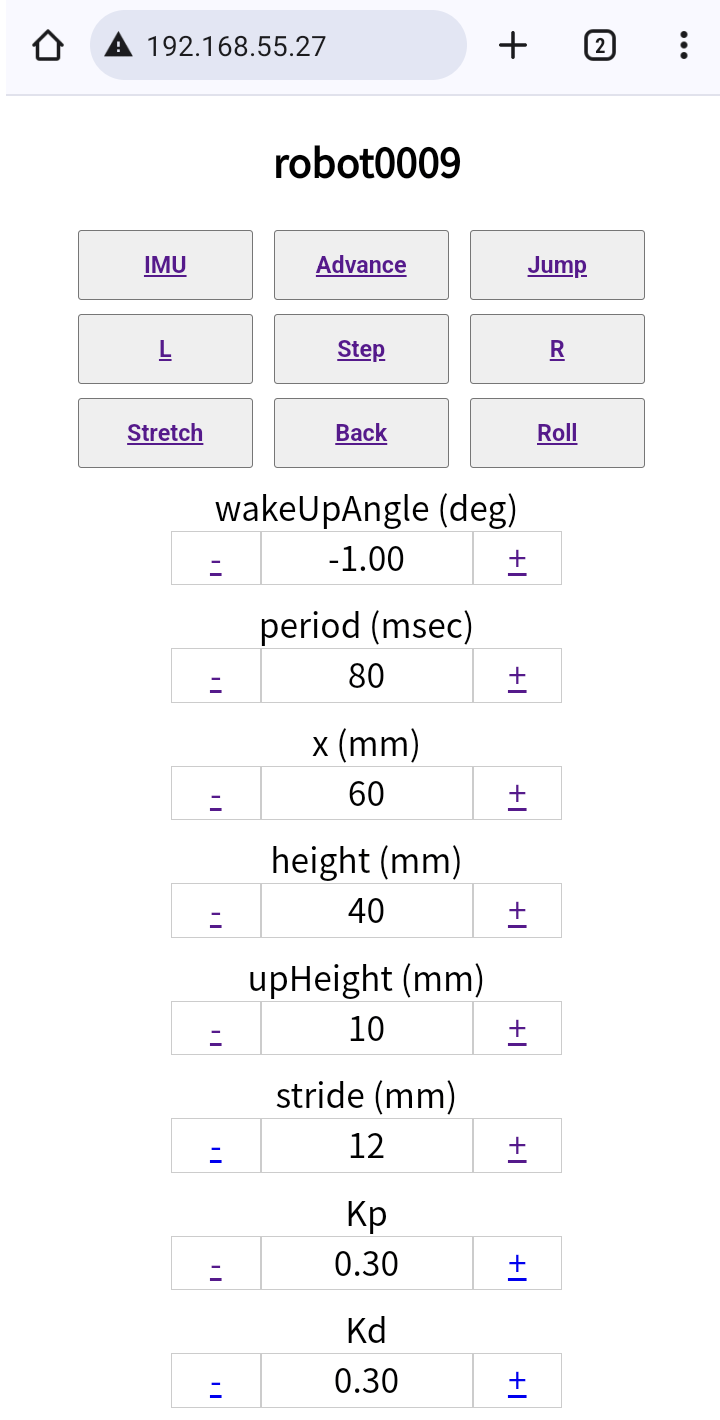
動作モードはボタンクリックでONし、再度クリックでOFFします。
パラメータは “-“、”+”をクリックして値を増減させます。
値は電源OFF後も保持されます。
動作
動作の様子を以下の動画にまとめました。
おわりに
ここではシリアルサーボ SCS0009による4脚ロボットの製法を記載しました。
シンプルなシステム構成で豊富な動作表現を実現できたと考えておりますので、是非参考にしていただければ幸いです。
何かございましたらコメントいただけますと幸いです。

関連記事
 SHISEIGYO-1 作例と代替部品の紹介
SHISEIGYO-1 作例と代替部品の紹介
 M5Stack ATOM Matrix で ハンディーバーサライタを製作 ~ POV1-ATOM ~
M5Stack ATOM Matrix で ハンディーバーサライタを製作 ~ POV1-ATOM ~
 1軸 姿勢制御モジュール の倒立に向けた準備 ーリアクションホイールへの道6ー
1軸 姿勢制御モジュール の倒立に向けた準備 ーリアクションホイールへの道6ー
 1軸 姿勢制御モジュール がやっと立った ーリアクションホイールへの道7ー
1軸 姿勢制御モジュール がやっと立った ーリアクションホイールへの道7ー
 1軸 姿勢制御モジュール SHISEIGYO-1 完成 ーリアクションホイールへの道14ー
1軸 姿勢制御モジュール SHISEIGYO-1 完成 ーリアクションホイールへの道14ー
 姿勢制御モジュール SHISEIGYO-1R 爆誕 ーリアクションホイールへの道15ー
姿勢制御モジュール SHISEIGYO-1R 爆誕 ーリアクションホイールへの道15ー
 3軸 姿勢制御モジュール SHISEIGYO-3 物理ブレーキ検討2 ーリアクションホイールへの道21ー
3軸 姿勢制御モジュール SHISEIGYO-3 物理ブレーキ検討2 ーリアクションホイールへの道21ー
 6重倒立に向けて③ ーリアクションホイールへの道66ー
6重倒立に向けて③ ーリアクションホイールへの道66ー