ADALM2000
Home >
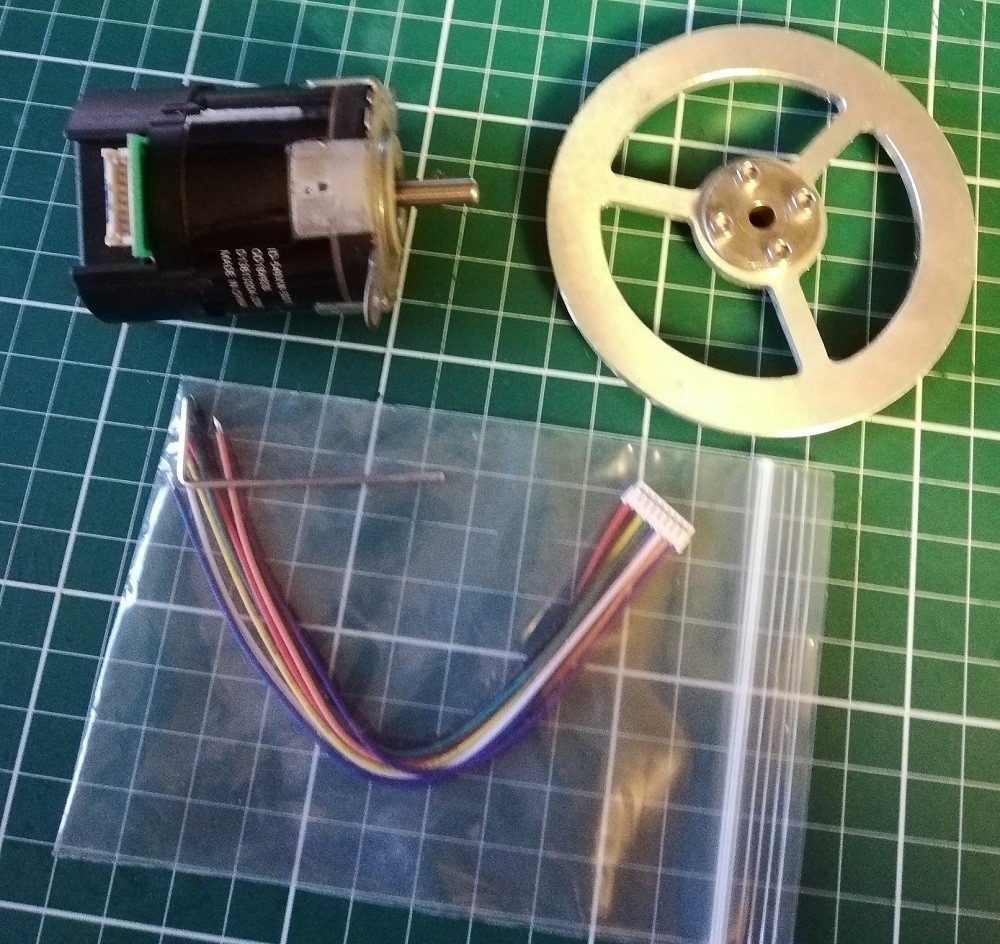
ブラシレスモータと格闘 ーリアクションホイールへの道1ー
前々からリアクションホイールによる姿勢制御に興味があり、2020年6月号のトラ技からJAXAの3軸姿勢制御モジュールの連載も開始され自作してみたい欲が爆発中でございました。 [amazonjs asin="B087H8TFX7" locale="JP" title="トランジスタ技術 2020年 ...
電子工作 2020.7.30 お父ちゃん ![]()

NeoPixel でバーサライタ検討
以前、M5Stack ATOM Matrix で ハンディーバーサライタを製作を楽しんだのですが、LED25個のマトリクスの1列分である5個のLEDしか使用しておらずもったいないなと感じておりました。 https://homemadegarbage.com/atom04 この"もったいな...
電子工作 2020.6.10 お父ちゃん ![]()
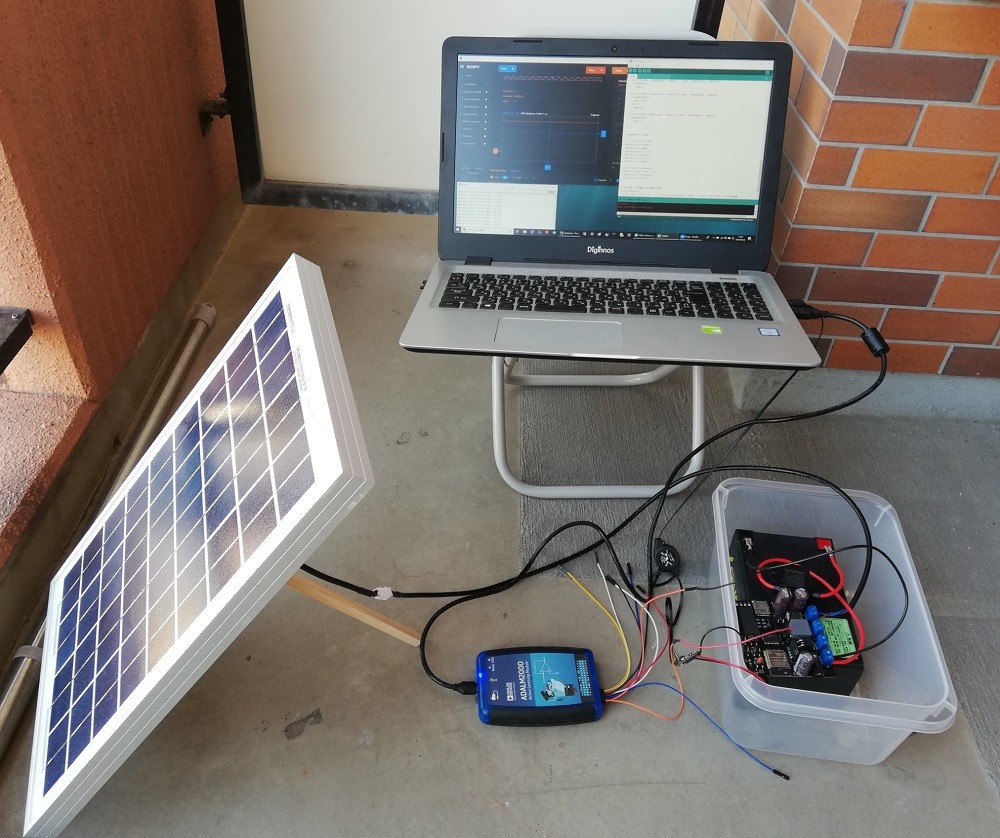
E32-SolarCharger の PWM制御 ーベランダ太陽光発電所への道4ー
さてこれまでソーラー充電コントローラの基本機能を学んできましたが、いよいよ発電開始!です。 実際にソーラーパネルとバッテリをつないで動かしていきましょう。 構成 ソーラーパネルと鉛蓄電池をコントローラに接続します。今回は負荷はつなげていません。 コントローラと蓄電池の+側...

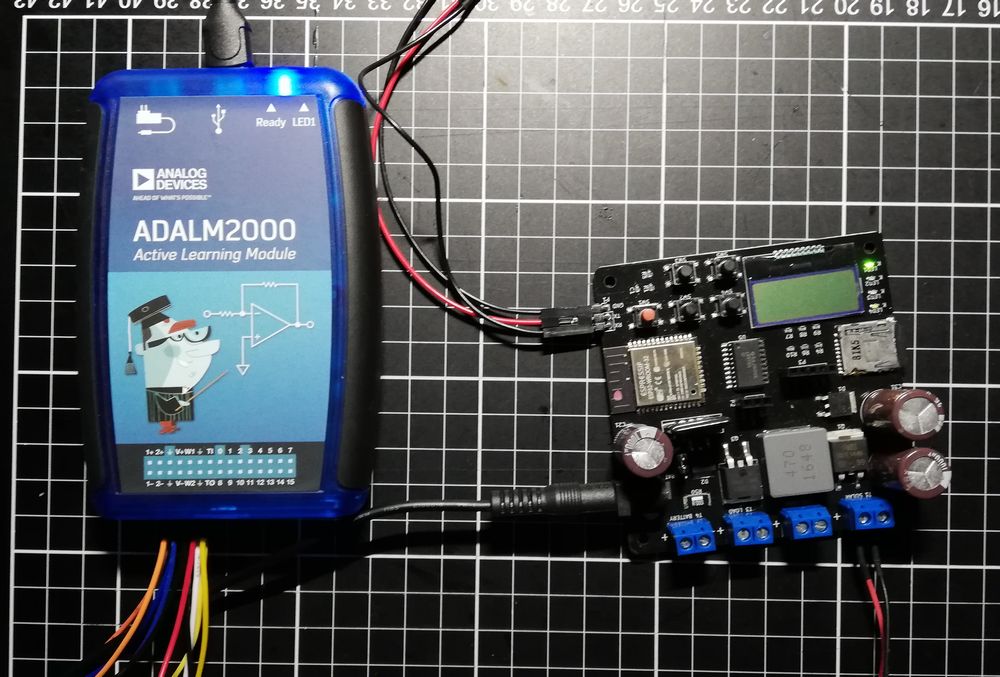
E32-SolarCharger の 入力電圧測定 ーベランダ太陽光発電所への道3ー
第3 回となりますシリーズ "ベランダ太陽光発電所への道"。今回もソーラー充電コントローラ E32-SolarCharger の基礎的な動作を学びます。 [amazonjs asin="B079LH6BRF" locale="JP" title="E32-SolarCharger - ESP-WR...