センサ
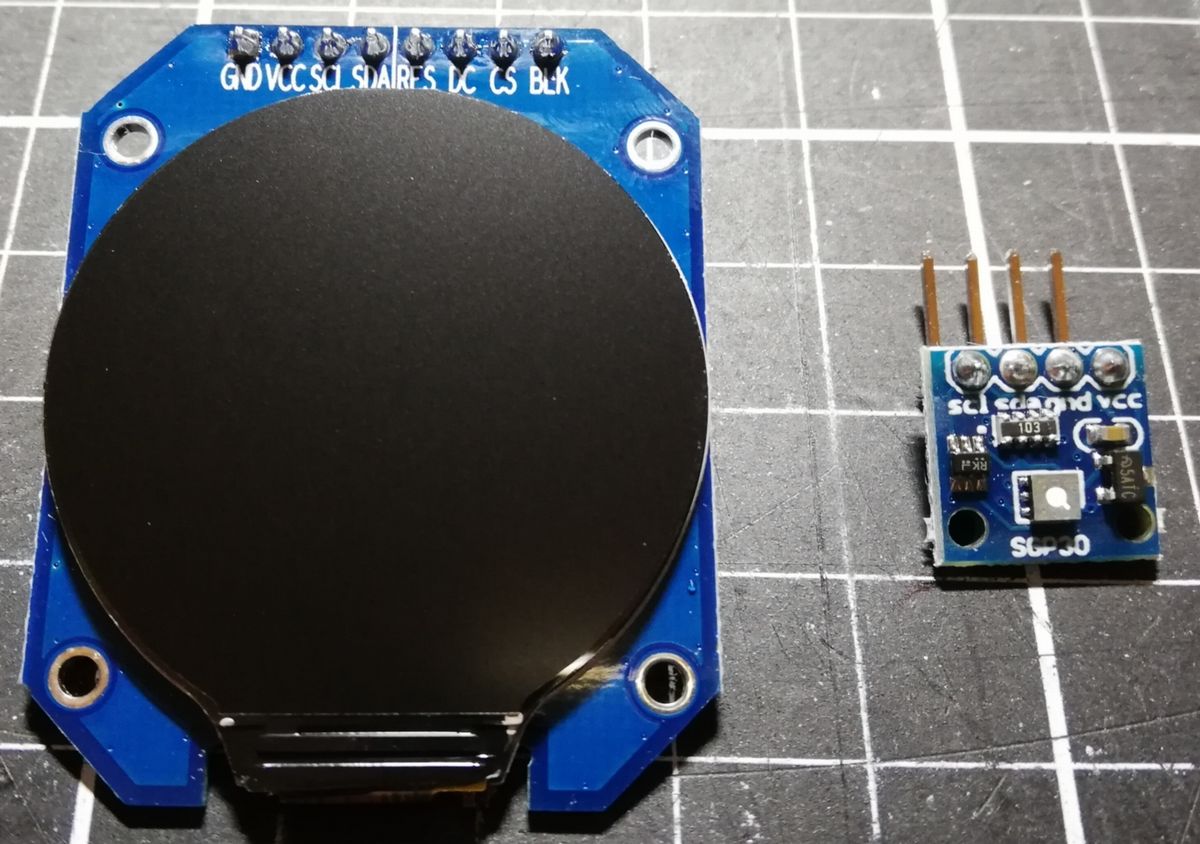
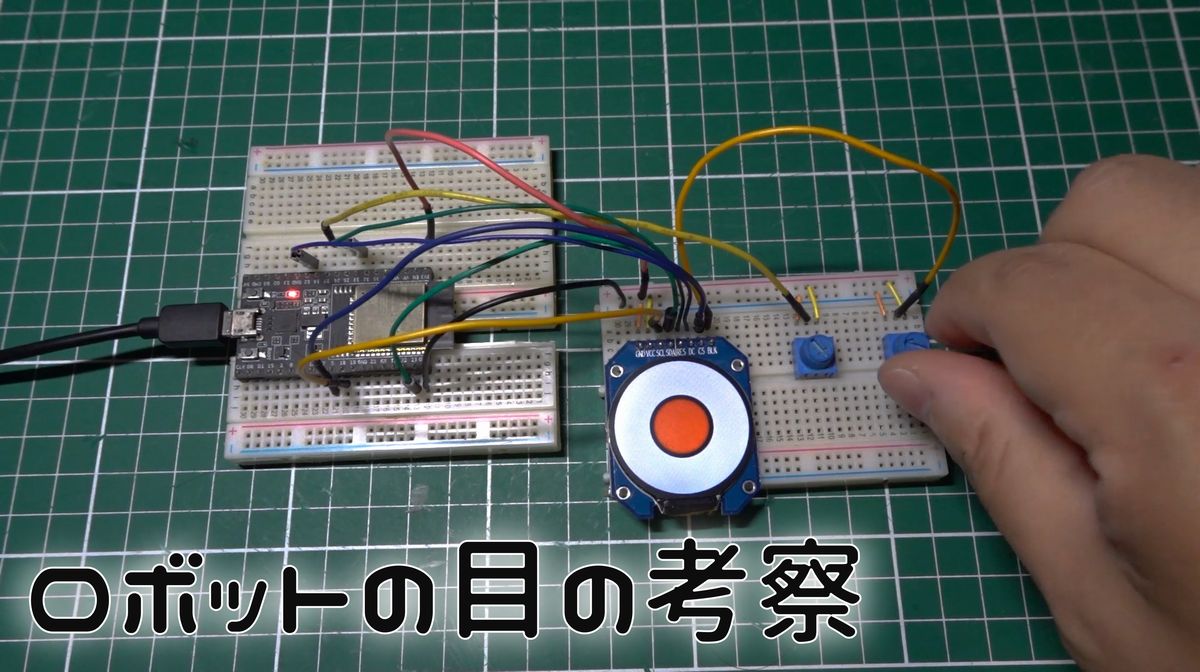
円形ディスプレイとCO2センサを堪能
Makerfabs 様よりまたまた製品を提供していただきました。 いつも本当にありがとうございます! 良いディスプレイがあるよとご提案いただき、ほかにも何かあればとのことで お言葉に甘えて最近はやりのCO2検出をやってみたくAir Quality Sensorもいただいちゃいました♪ ...
電子工作 2021.4.13 お父ちゃん ![]()

Lora通信 土壌センサの低消費電力化
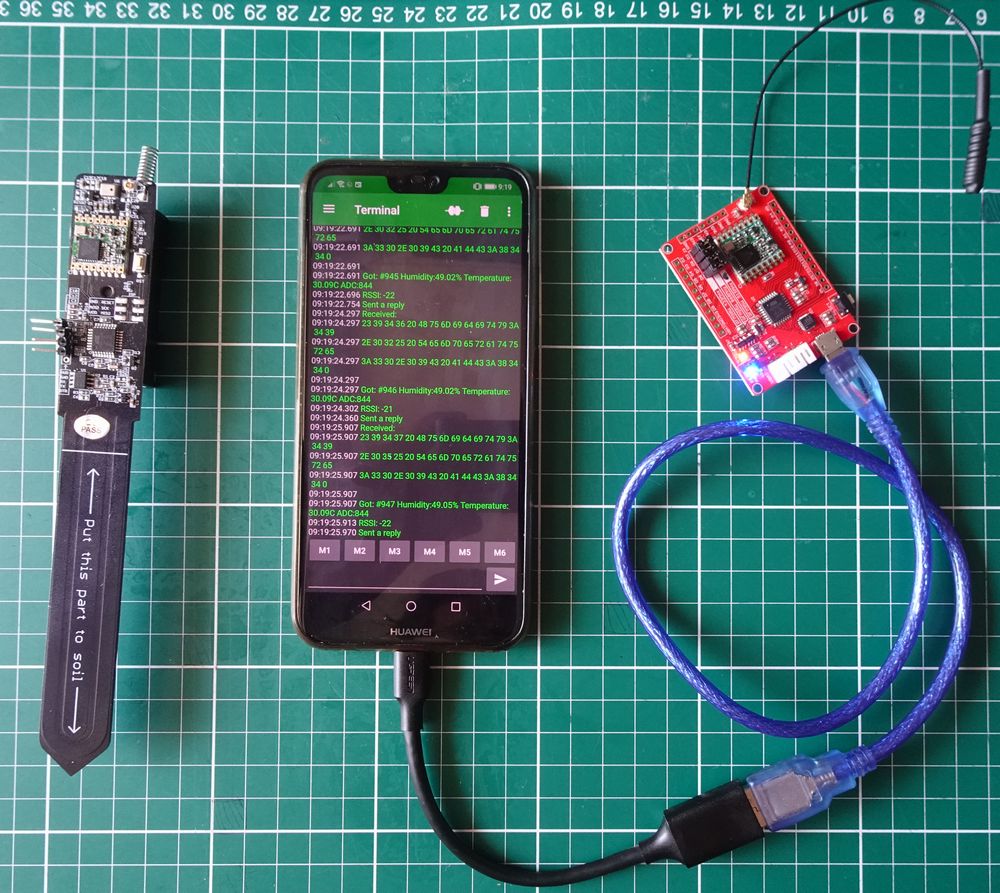
前回はMakerfabs 様よりいただいたLora通信 土壌センサの基本動作を堪能し、300m以上の伝達を確認いたしました。 https://homemadegarbage.com/makerfabs07 土壌センサは単4電池2本で動作可能です。 ここでは、センサの長期動作を目指して消費電...
IoT 2020.7.20 お父ちゃん ![]()
Lora通信 土壌センサを使ってみた
またまたMakerfabs 様より素晴らしい製品たちを提供していただきました。 色々いただきましたので随時ここで紹介させていただきますが 今回は Lora Temperature/ Humidity/ Soil Moisture Sensor を紹介させていただきます。 ...
IoT 2020.7.18 お父ちゃん ![]()
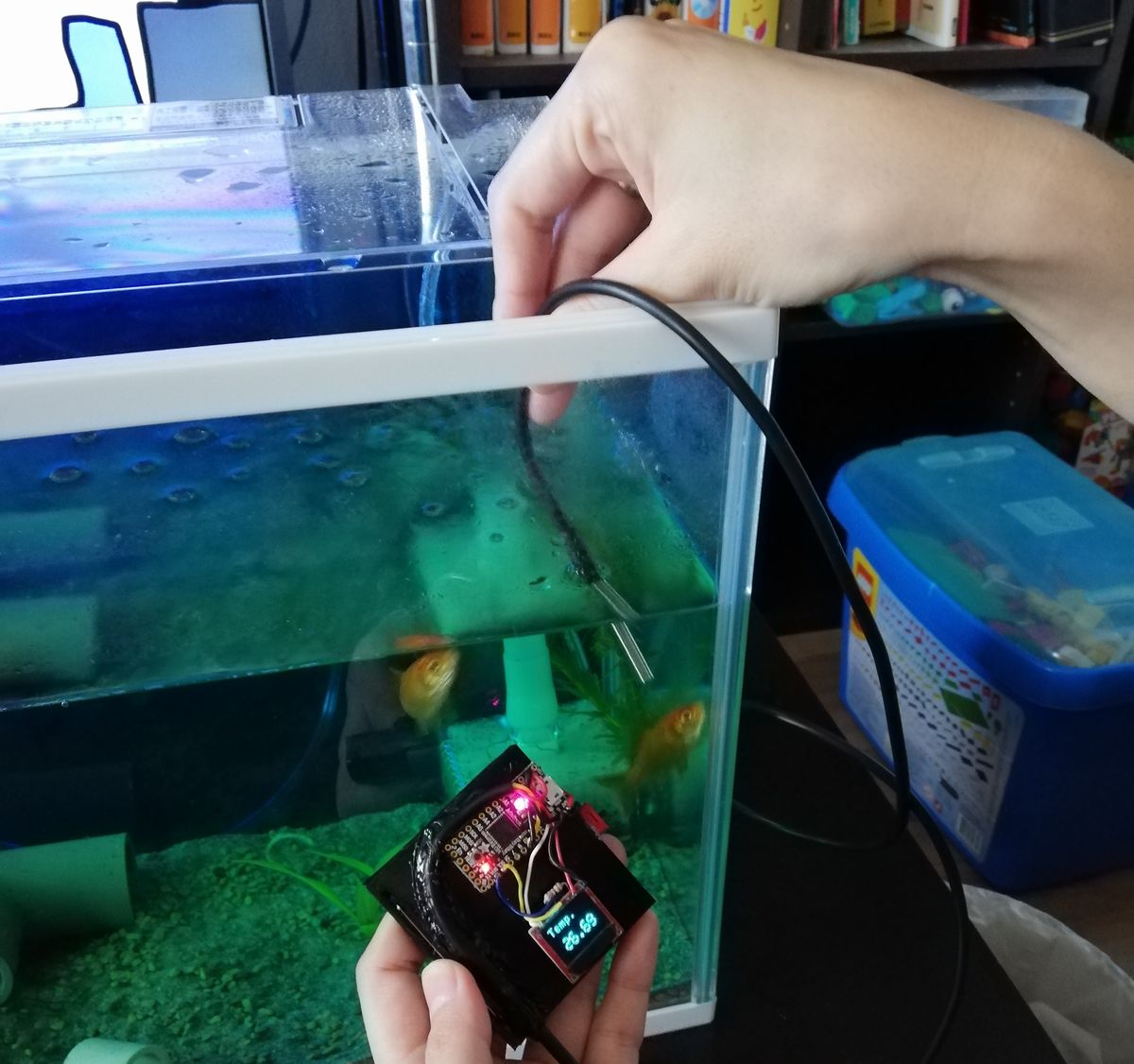
温度センサ で 水温計 作製
我が家の金魚水槽の水温を管理したいとお母ちゃんがいうので、センサを購入しました。 [amazonjs asin="B07M886SBK" locale="JP" title="3個 セット ArduinoセンサーDS18B20のための防水デジタルサーマルプローブまたはセンサーラボ温度測定材料 (3...
360° 連続回転サーボ と ジェスチャーセンサ で 首振りトンボちゃん
360°連続回転サーボとジェスチャーセンサで首振りトンボを作ってみましたので記載致します。 構成 ジェスチャーセンサで指の動きを検知して360度連続回転サーボの回転方向をマイコンで制御します。 部品 マイコン Arduino UNO [amazonjs asin="B008G...
電子工作 2018.10.2 お父ちゃん 

D.I.Y. アイトラッキング -フォトリフレクタ と Arduino で瞳孔動向センシング-
そろそろハロウィンに向けて準備に取り掛かっておりまして。 去年は家族の半数が体調不良で何もできなかったので今年こそはと気合入っております! :evil: ↓一昨年のハロウィンの様子。 https://homemadegarbage.com/halloween2016 ハロウィンへの試作としま...
電子工作 2018.9.19 お父ちゃん
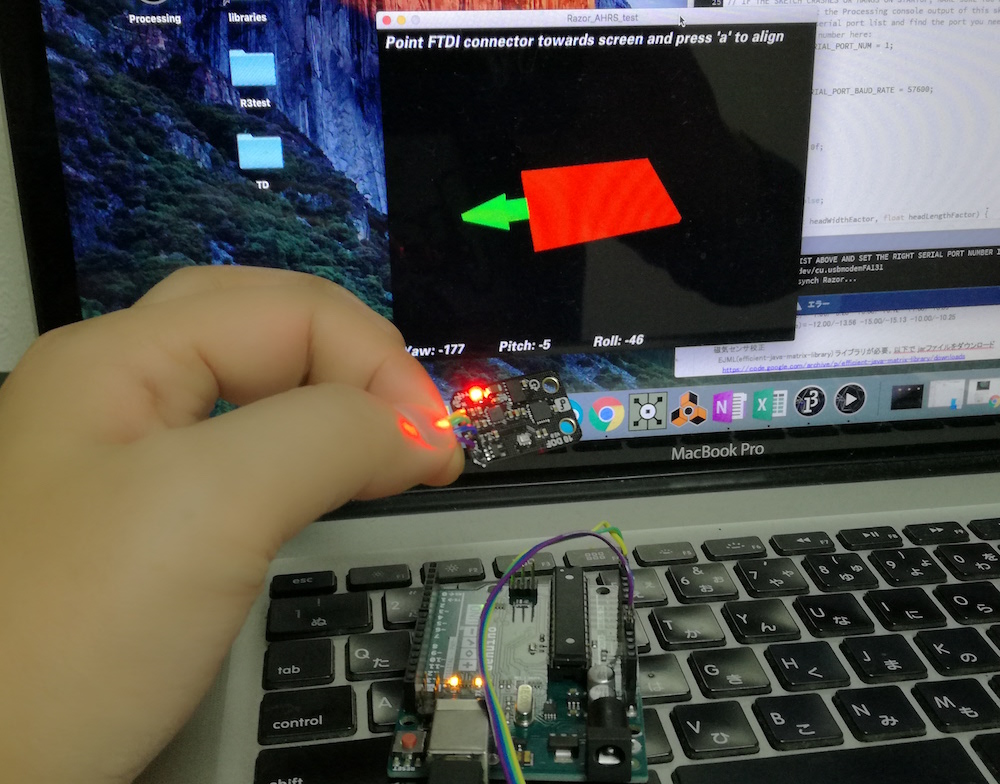
10自由度 Mems IMUセンサ モーションセンス基本動作
DFROBOT様より、提供頂いた10自由度 Mems IMUセンサモジュールを試してみました。 10自由度 Mems IMUセンサ [bc url="https://www.dfrobot.com/product-818.html"] このモジュールには ADXL345...
電子工作 2017.11.16 お父ちゃん
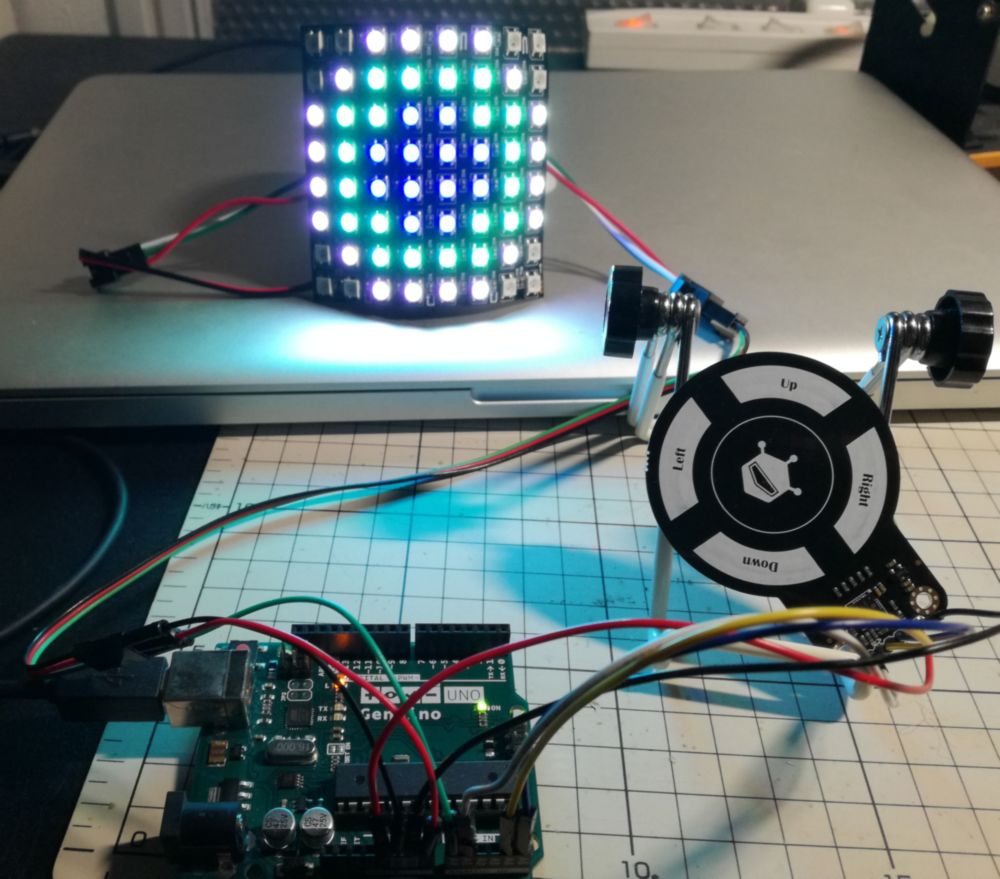
ジェスチャーセンサ で LED をコントロール
DFROBOT様より、ありがたいことに部品提供頂きました!! #dfrobot 様より 提供頂きました! 随時 ブログ記事書きたいと思います! Home Made Garbageさん(@homemadegarbage)がシェアした投稿 - 2017 10月 30 3:43午前 PD...
電子工作 2017.11.1 お父ちゃん

測距センサ VL53L0X を用いた身長測定器
子供って長時間じっとできないので身長をはかるのってなかなか大変。。。 そこで低価格で高精度のセンサを見つけたので場所と時間を取らない身長測定器をつくりました。 構成 距離センサ VL53L0X 標準が120cmで、広範囲モードで220cmくらいまでは測定できるようです。デー...
電子工作 2016.9.17 お父ちゃん