
電子工作
AIエージェント Codex で 強化学習2 起き上がりロボ
前回はAIエージェント Codexに強化学習を実施してもらい2足歩行ロボットのバランス動作を実現しました。 https://homemadegarbage.com/rl12// Codex先生が学習の環境構築、報酬設計、学習フローすべて考えてくださり、長年憧れていた動作ができました。 C...
電子工作 2026.6.11 お父ちゃん ![]()

AIエージェント Codex で 強化学習2足歩行ロボット HM-01
最近はAIエージェント Codexをさわって色々楽しませていただいております。 今回はCodexで強化学習を楽しみましたので報告いたします。 テーマとして2足歩行ロボットのバランス動作を選択しました。 これまた生活変わるレベルで驚かされました。 2足歩行ロボットの強化学習...
電子工作 2026.6.9 お父ちゃん ![]()

連続回転サーボで車輪倒立振子
今年(2026年)に入ってから倒立振子ばかり作っております。 https://homemadegarbage.com/bala34/ この過程でどんなモータでもどんな構成でも使える倒立メソッドを確立することができました (気のせいかもしれないが)。 モータに関してはDCモータ、サーボモータ、B...

AIエージェント Codex で ドローン2MuJoCo で シミュレーション
前回はAIエージェント Codex を活用してドローンの学習を開始しました。 https://homemadegarbage.com/drone04/ Codex先生のおかげで姿勢制御やゲームコントローラによる位置制御を数日で実現できてしまいました。 Codex先生にドローン制御コー...

AIエージェント Codex で ドローン
AIエージェント Codex を活用して車輪倒立振子の制御システム構築を成し遂げました。 https://homemadegarbage.com/codex03/ 現代技術の恩恵を十分に浴びることができたと感じました。 しかし倒立振子はいろいろなモータや構成で作りに作りまくっており、成熟した俺...

リアクションホイール倒立振子 SHISEIGYO-3 N1 使用法
3軸リアクションホイール倒立振子 SHISEIGYO-3 N1 の使用法を紹介させていただきます。 SHISEIGYO-3 N1 実機を以下で販売中です。是非ご検討ください。 https://shop.homemadegarbage.com/product/s-3-n1/ ...
電子工作 2026.5.18 お父ちゃん ![]()
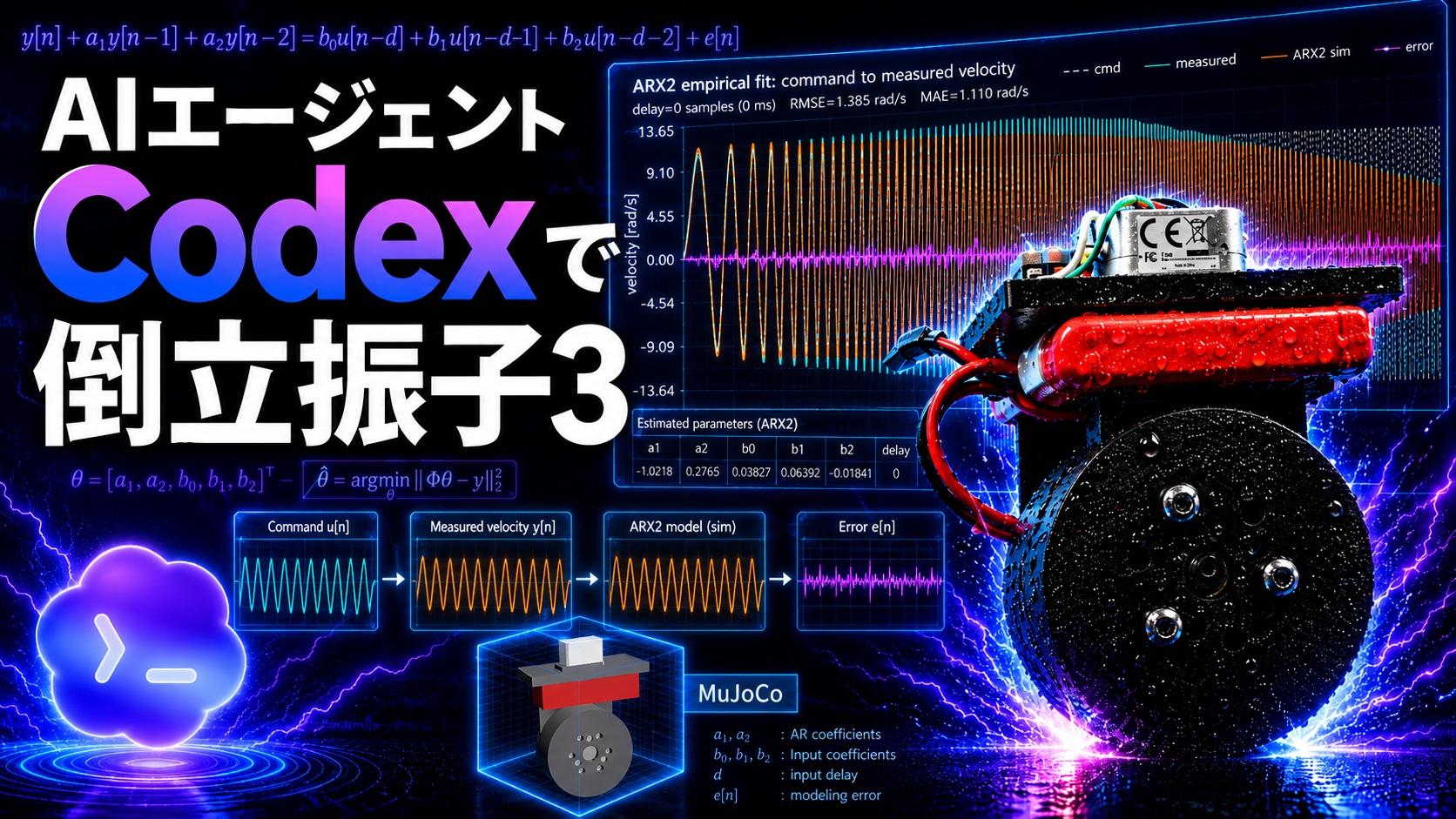
AIエージェント Codex で 倒立振子3 ーモータモデルの同定手法を確立ー
前回は Codex に倒立振子の制御そのものを考えてもらい、見事実機でも素晴らしい倒立制御が実現されました。 https://homemadegarbage.com/codex02 AIエージェントによるバイブコーディングで倒立振子の動作実現は無理であると考えていたため、非常に驚きました。 C...

AIエージェント Codex で 倒立振子2ーバイブコーディングで倒立動作ー
前回はAIエージェント Codex に初めて触れ、そのコード生成の精度に大変驚かされました。 https://homemadegarbage.com/codex01 倒立振子の倒立動作を指示してコーディングしたり、起き上がり動作をさせて動作ログからパラメータ調整するコードも生成して実機動作を確認...

AIエージェント Codex で 倒立振子ーはじめての Codexー
お母ちゃんが Codex すごく便利で使ったらもう離れられないってさ Codex試してみたら便利すぎた — ムプー (@j6XX2IChZG99891) May 8, 2026 そこまで言うならと興味が湧いて、試してみたので報告いたします。 ...

Atomic Motion Base 不具合
前回はM5Stack社の Atomic Motion Base ユニットを用いた倒立振子の検証を実施しました。 https://homemadegarbage.com/bala35// その際に、DCモータがうまく駆動できない不具合を確認しました。 [amazonjs asin...
電子工作 2026.5.9 お父ちゃん ![]()

Atomic Motion Base つかってみた
最近は様々な機体構成やモータで車輪倒立振子を作りまくっております。 根本的な制御方式は変えてないので、どんな構成にも対応できるメソッドが確立できたと考え、前回は簡素なモータを用いてメソッドの検証をしました。 https://homemadegarbage.com/bala34/ みごとDCモー...

リアクションホイール姿勢制御モジュール SHISEIGYO-3 N1 完成
前回は ID-529XW を3個使用したリアクションホイール姿勢制御モジュールを製作しました。 https://homemadegarbage.com/reactionwheel82 物理ブレーキなしでの自立動作を目指しましたが、不可能であることが分かりましたので、ここではブレー...
電子工作 2026.4.29 お父ちゃん ![]()

俺の倒立メソッドを他のモータでも
ここ最近は車輪倒立振子作りまくってるんですよ。 そりゃあもう狂ったように ブラシレスモータやQDDなど各種モータで製作を楽しみました。 直近ではシリアルサーボ XL330 で倒立振子をつくりました。 シリアルサーボで倒立振子 pic.twitter.com/u2HSfDVwRd ...

すごい Wheel-legged ロボに憧れて3
前回は Wheel-legged Robot 直立モード時の歩行動作の検証を実施しました。 https://homemadegarbage.com/bala32// 安定歩行実現のために足を改良して平行リンク機構を導入したので、ここでは再度倒立モードの検証を実施します。 ...

すごい Wheel-legged ロボに憧れて2
前回は Agibot社の X2-N に憧れて自分なりのWheel-legged Robot を製作しました。 倒立モード / 直立モードの移行まで検証いたしました。 https://homemadegarbage.com/bala31/ ここでは直立モード時の歩行動作の検証を実...