SHISEIGYO-1 DC の現状と今後 ーリアクションホイールへの道46ー
DCモータを用いたSHISEIGYO-1 DC につきまして色々試しましたので報告いたします。
前回の報告は以下
目次
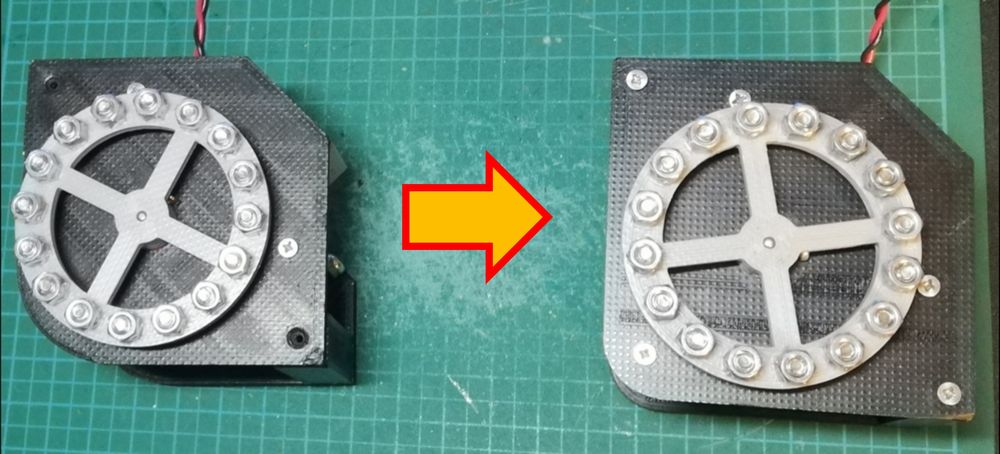
筐体修正
前回のテストで物理ブレーキなしでの起き上がり倒立は難しいことがわかりましたので、支点のRを20mmから10mmに変更しました。
DCモータで姿勢制御モジュールを製作
タミヤ(TAMIYA) ミニ四駆 グレードアップパーツ No.487 トルクチューン2モーターPRO 15487 を Amazon でチェック! https://t.co/MzJ2IWc2Kx #電子工作 #DIY #3Dプリント#tamiya #タミヤ pic.twitter.com/hkdmxK6C1b
— HomeMadeGarbage (@H0meMadeGarbage) October 24, 2021
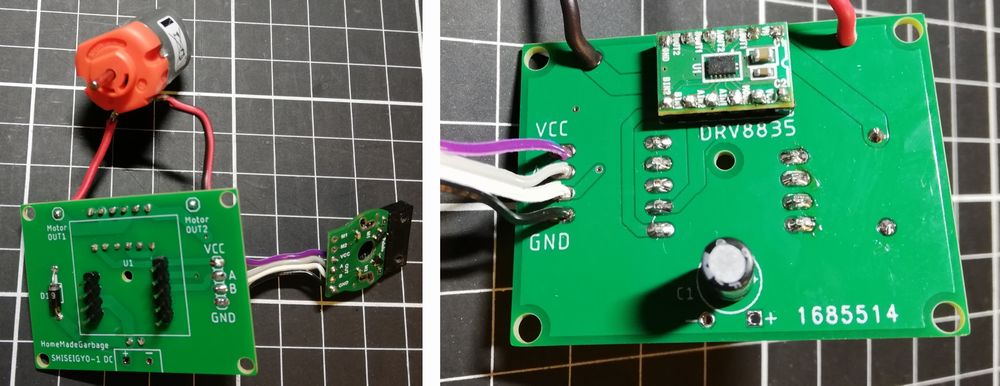
基板試作
基板を試作してみました。空中配線が減ってスッキリしました。
長時間動作検証
SHISEIGYO-1 DC を長時間動かすと、急にコントローラが停止して
その後もモータ駆動の瞬間にコントローラが停止する現象が起きます。
しばらく休むと正常に動作します。
【この現象はなんだろう?】
タミヤのDCモータを使用したSHISEIGYO-1 DCをしばらく動かしていると動作がおかしくなる。
恐らく長時間動作による熱が原因だと思うのだけど(しばらく休ませると治る)モータ駆動の瞬間にコントローラが落ちて初期化する
瞬間過電流による電圧降下だとは思うけど
なんで? pic.twitter.com/L7AjQZvKed— HomeMadeGarbage (@H0meMadeGarbage) November 6, 2021
モータドライバDRV8835のサーマルシャットダウン(TSD)が利いてるのではないかというアドバイスをいただきました。
https://t.co/ckvBFnaqW8
データシートを見たところDRV 8835ではThermal Shutdownがついていて、この温度の設定はコントロールできないっぽいです。なので適切に放熱してあげる必要がありそうです。コントローラが落ちるのは興味深いですね… pic.twitter.com/HtIPAAGtV4
— Tomix🍣 (@TomiXRM) November 6, 2021
シャットダウン時にコントローラも落ちる理由が不明ですが、モータドライバのTSDが要因で間違いなさそうです。
シャットダウン時のHブリッジの各素子のステータスがどうなるのか記載ないので何とも言えませんがタイミング悪く両サイドONして瞬間的に電流が流れてコントローラも落ちるのかもしれません。
DRV8835は制御基板とモータの間に配置してしまったので排熱は難しいですね。。
ちょっとモータドライバの選定からやり直します。
おわりに
だいぶSHISEIGYO-1 DCのことがわかってきました。
残念ながら現状長時間動作ができない状況ですが更に検討・改善を進めていきたいと思います。
次の記事
関連記事
 DCモータで姿勢制御 SHISEIGYO-1 DC 爆誕 ーリアクションホイールへの道43ー
DCモータで姿勢制御 SHISEIGYO-1 DC 爆誕 ーリアクションホイールへの道43ー
 SHISEIGYO-1 DC の改善検討 ーリアクションホイールへの道44ー
SHISEIGYO-1 DC の改善検討 ーリアクションホイールへの道44ー
 姿勢制御モジュール 4重倒立挑戦 ーリアクションホイールへの道45ー
姿勢制御モジュール 4重倒立挑戦 ーリアクションホイールへの道45ー
 SHISEIGYO-1 DC 完成! ーリアクションホイールへの道47ー
SHISEIGYO-1 DC 完成! ーリアクションホイールへの道47ー
 姿勢制御モジュール 4重倒立挑戦2 ーリアクションホイールへの道48ー
姿勢制御モジュール 4重倒立挑戦2 ーリアクションホイールへの道48ー
 姿勢制御モジュール 4重倒立挑戦3 ーリアクションホイールへの道49ー
姿勢制御モジュール 4重倒立挑戦3 ーリアクションホイールへの道49ー
 姿勢制御装置とバーサライタの融合 ーリアクションホイールへの道50ー
姿勢制御装置とバーサライタの融合 ーリアクションホイールへの道50ー
 姿勢制御装置とバーサライタの融合2 ーリアクションホイールへの道51ー
姿勢制御装置とバーサライタの融合2 ーリアクションホイールへの道51ー