スタビライザ
Home >
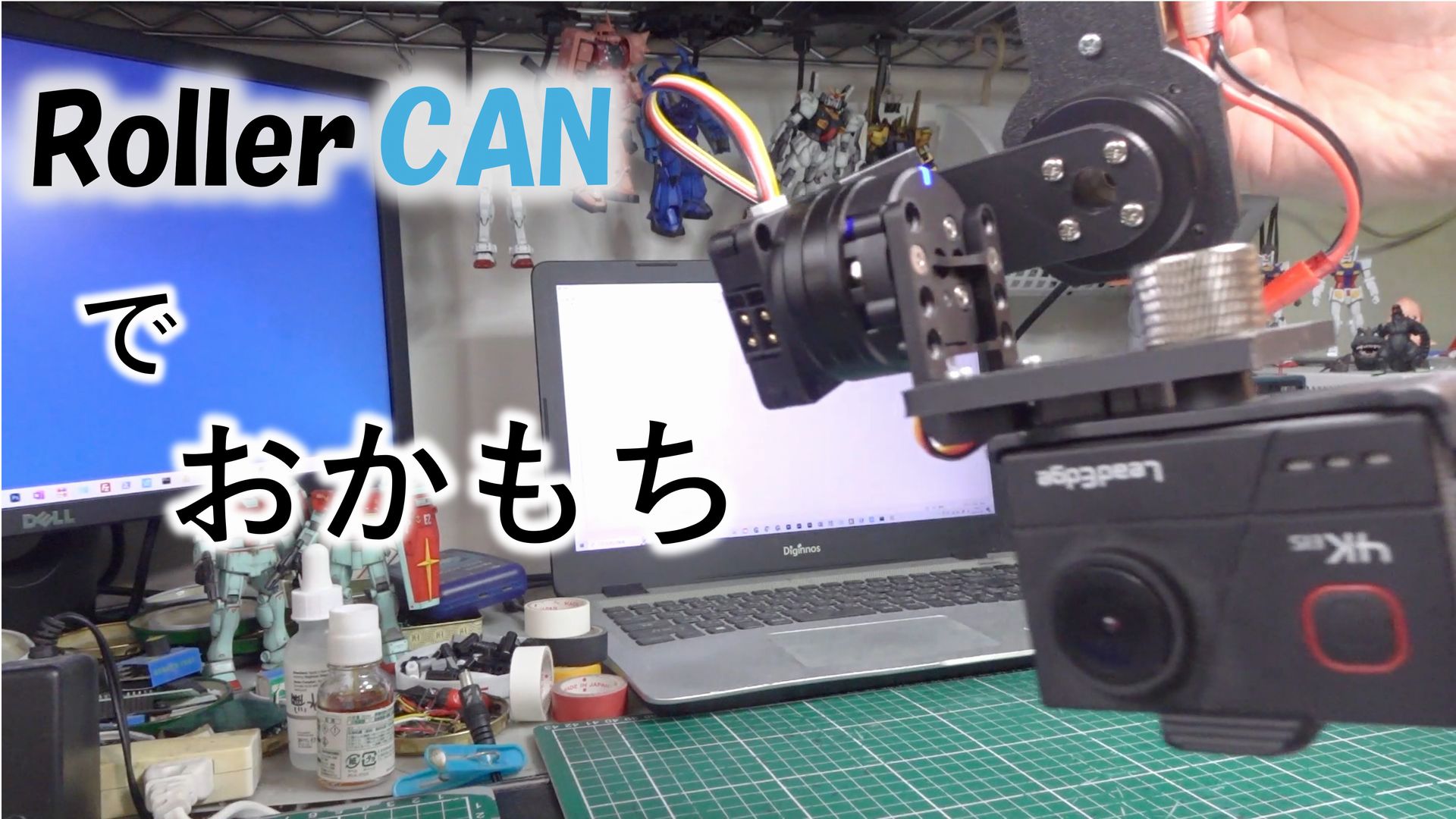
RollerCAN で おかもち
HomeMadeGarbage Advent Calendar 2024 |1日目 時折 "あー おかもち もちてー" と思うことがあり、これまでもサーボモータやブラシレスモータで おかもちを製作してきました。 https://homemadegarbage.com/okamochi/ htt...
Advent Calendar / 電子工作 2024.12.1 お父ちゃん ![]()