月: 2017年5月
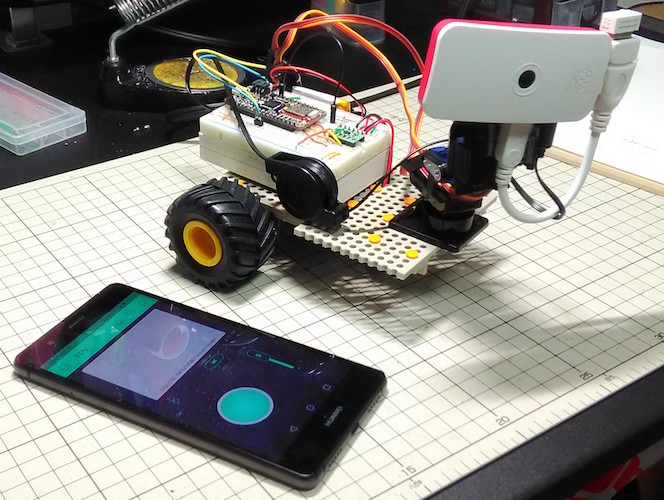
ラズパイカメラでFPVラジコンカー自作
ラズパイカメラモジュールを入手したので前々からやってみたかったFPVラジコンカーを作ってみました。 FPV(First Person View)とはドローンやラジコンにカメラを搭載して、映像を観ながら機体を操作する技術です。今回はスマホをコントローラにして自作してみました。 ラズパイカメラモジュ...
Raspberry Pi / 電子工作 2017.5.29 お父ちゃん 

Teensy で目玉アニメ -サードアイ開眼-
前に試した小型TFT液晶目ん玉アニメをヘアバンドにつけてみました :roll: 開眼????! 開眼 #teensy Home Made Garbageさん(@homemadegarbage)がシェアした投稿 - 2017 5月 26 11:27午後 PDT 目ん...
電子工作 2017.5.27 お父ちゃん

Blynk-controlled Stag Beetle
I got a broken old stag beetle toy with a wired remote control. I modified it so that it can be operated remotely from a smartphone with BLE! ...
電子工作 2017.5.21 お父ちゃん
甲虫王者ムシキング リモコンバトル 改
近所の野菜屋さんが 壊れてるけど。。と おもちゃをくれました :-D [amazonjs asin="B0002YNSX0" locale="JP" title="甲虫王者ムシキング リモコンバトル パラワンオオヒラタクワガタ"] ずいぶん昔のおもちゃのようでリモコンで動くクワガタですww...
電子工作 2017.5.21 お父ちゃん
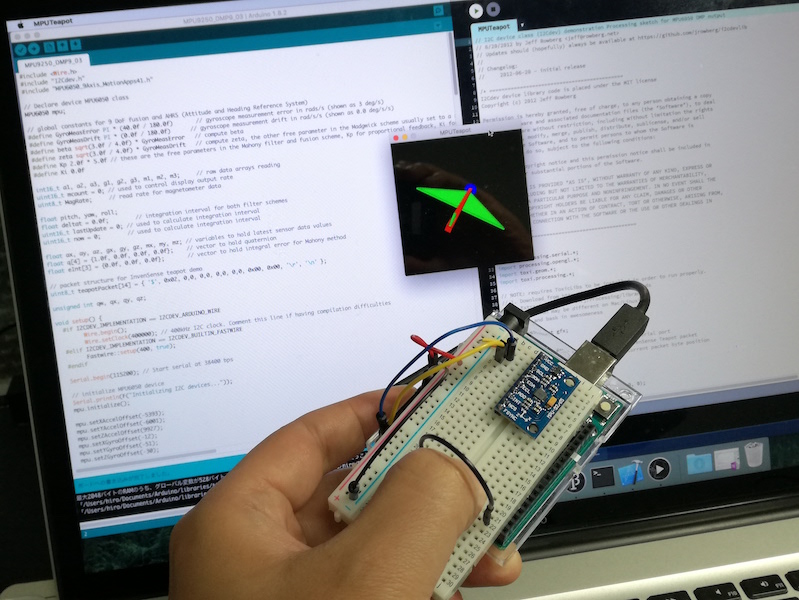
モーションセンサ比較 - MPU6050 vs MPU9250 vs BNO055 –
モーションセンサが3種ほどそろったので基本動作確認で簡単に比較してみました。 MPU6050 6軸モーションセンサ (3軸加速度+3軸ジャイロ)です。安定のHiLetgoで購入。 [amazonjs asin="B019664RAM" locale="JP" title="KKHMF ...
電子工作 2017.5.16 お父ちゃん
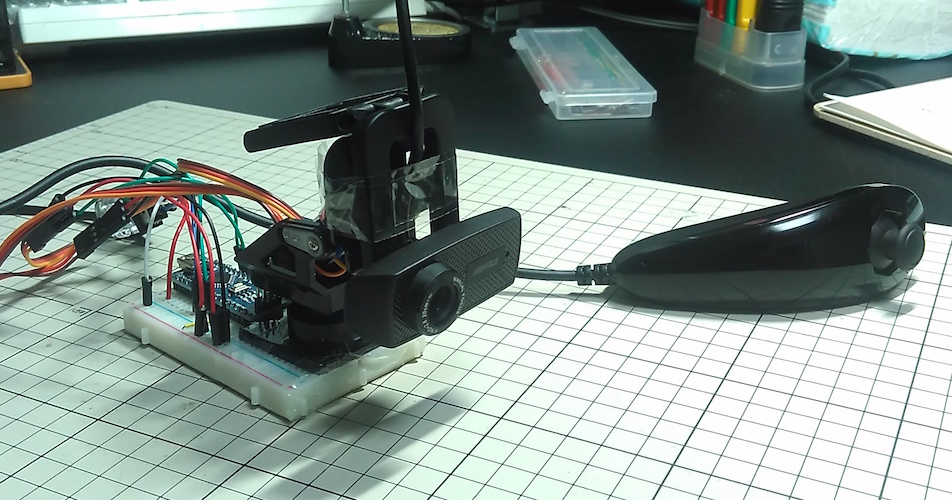
2軸 カメラマウント 試してみた
我が家ではラズパイサーバにウェブカメラをつけてリビングをどこでも監視できるようにしてます???? https://homemadegarbage.com/raspi-camera-mjpgstreamer このカメラを上下左右に移動できれば面白いかなぁなどと思いサーボモータを使った2軸の...
電子工作 2017.5.9 お父ちゃん

どうぶつしょうぎ を自作!
長女ちゃんが最近ハマっているという"どうぶつしょうぎ"を児童館でみんなでやりました♪ なかなかおもしろい!駒の動かし方も描いてるし、マス数や駒数が違う色々な種類があって子供が喜ぶのも納得 :-) 大きいのは将棋と全く同じだもんね。 [amazonjs asin="B002FL3WVG" lo...
工作・ハンドメイド 2017.5.6 お父ちゃん
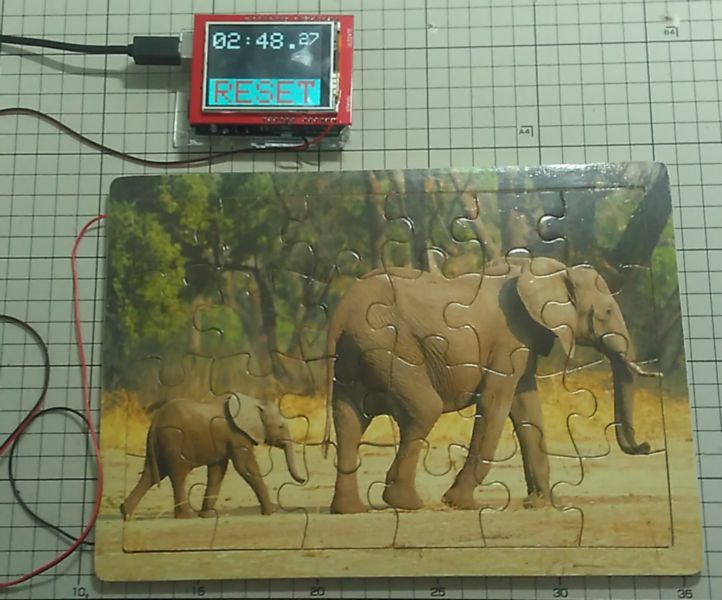
Jigsaw Puzzle Timer
I made Jigsaw Puzzle Timer using touch panel TFT display. This measures the time until the puzzle is complete. Constitution Touch Screen Display S...
電子工作 2017.5.5 お父ちゃん
できあがるまでの時間を測定 ~ パズル・タイマー ~
子どもたちがパズルを競うようにしてやってるのをみて、タイマーつけてみよう(・∀・)と思い立ちました。 パズルが完成するとタイマーが止まりできあがるまでの時間を測定します。 構成 Arduino UNO用タッチスクリーンディスプレイシールドを用いて時間表示し、パズルの裏面には導電テープを張っ...
電子工作 2017.5.5 お父ちゃん

PICマイコン評価ボードもろたよ ~ MPLAB XPRESS ~
先日「DESIGN SPARK Microchip 8bit MCUクイズ」というものに応募したところプレゼント商品をいただきました :lol: ! なんか当たった。 #designspark pic.twitter.com/k7LpMI78eK — HomeMadeGarbage (@...
電子工作 2017.5.4 お父ちゃん