モーションセンサ比較 - MPU6050 vs MPU9250 vs BNO055 –
 お父ちゃん
2017.5.16
お父ちゃん
2017.5.16
本記事にはアフィリエイト広告が含まれます。
モーションセンサが3種ほどそろったので基本動作確認で簡単に比較してみました。
目次
MPU6050
6軸モーションセンサ (3軸加速度+3軸ジャイロ)です。安定のHiLetgoで購入。
以下でArduinoライブラリとプログラム例が提供されています。
https://github.com/jrowberg/i2cdevlib/tree/master/Arduino/MPU6050
以下のライブラリも必要です。
https://github.com/jrowberg/i2cdevlib/tree/master/Arduino/I2Cdev
ここでは以下のプログラム例を用いてProcessingの3Dモデルを動かしてみます。
https://github.com/jrowberg/i2cdevlib/tree/master/Arduino/MPU6050/examples/MPU6050_DMP6
構成
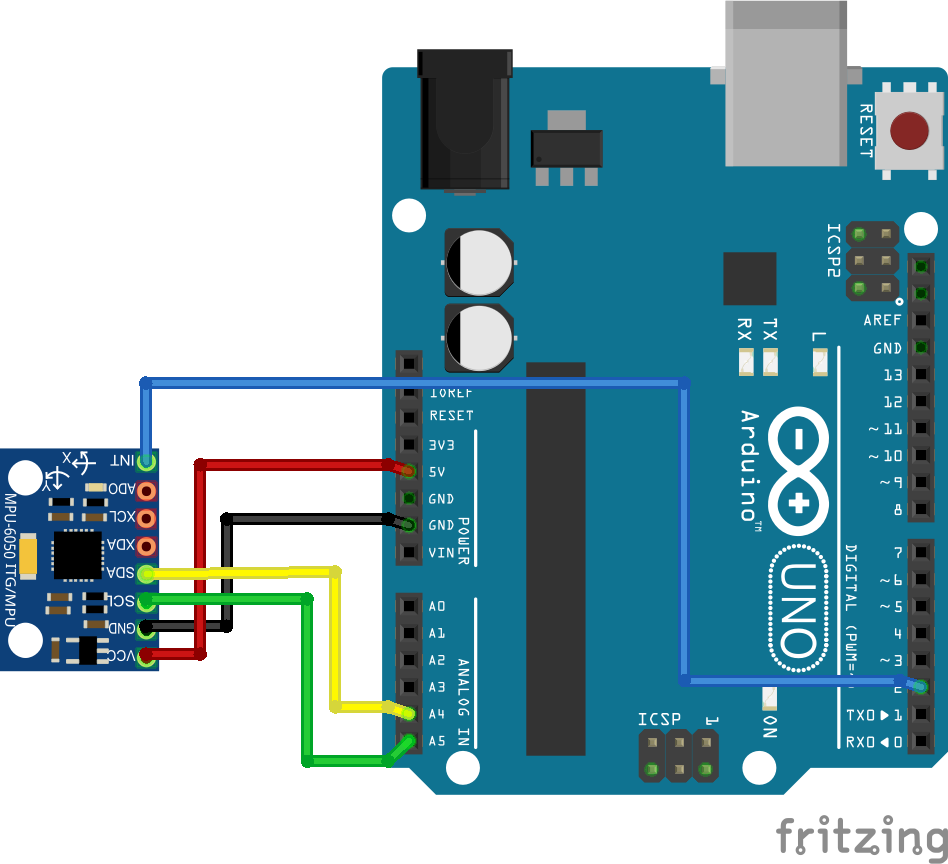
Arduinoプログラム
以下のプログラム例を修正します。本デバイスのDMP(Digital Motion Processor)という姿勢角を算出する機能を使用します。
https://github.com/jrowberg/i2cdevlib/blob/master/Arduino/MPU6050/examples/MPU6050_DMP6/MPU6050_DMP6.ino
100行をコメントアウトして117行のコメントアウトを解除してセンサの姿勢角(クォータニオン)を出力するようにして書き込みます。
Processingプログラム
以下のプログラム例を使用します
https://github.com/jrowberg/i2cdevlib/blob/master/Arduino/MPU6050/examples/MPU6050_DMP6/Processing/MPUTeapot/MPUTeapot.pde
71行で接続しているマイコンのポートを指定し実行ます。
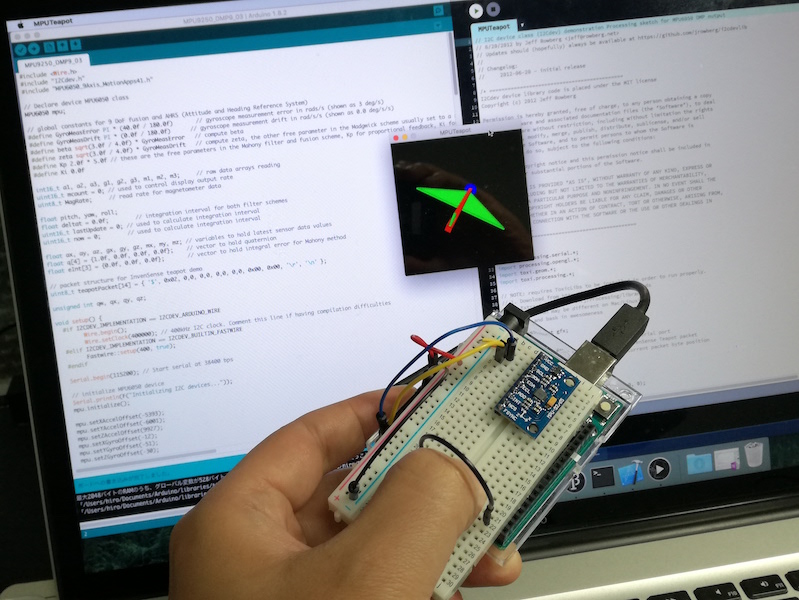
動作
オフセット調整をしていないため姿勢角、特にYaw角が安定してません。。。
オフセット調整
MPU6050センサを平行に置いた状態でZ軸加速度が1g(16384)、残りが0になるように調整します。
適切なオフセット値は以下のプログラムで調べることが出来ます。便利!
https://github.com/jrowberg/i2cdevlib/tree/master/Arduino/MPU6050/examples/IMU_Zero
こちらを書き込んで実行すると数分でオフセット値が導出されます。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 |
Initializing I2C devices... Testing device connections... MPU6050 connection successful averaging 1000 readings each time expanding: .... XAccel YAccel ZAccel XGyro YGyro ZGyro [0,0] --> [32203,32250] [0,0] --> [14594,14613] [0,0] --> [2606,2584] [0,0] --> [-836,-837] [0,0] --> [261,262] [0,0] --> [-59,-60] .... [-1000,0] --> [22757,32238] [-1000,0] --> [6247,14588] [0,1000] --> [2583,11059] [0,1000] --> [-837,3146] [-1000,0] --> [-3729,249] [0,1000] --> [-60,3923] .... [-2000,0] --> [13275,32233] [-2000,0] --> [-2113,14593] [0,2000] --> [2597,19563] [0,1000] --> [-825,3153] [-1000,0] --> [-3725,250] [0,1000] --> [-48,3926] .... [-3000,0] --> [3783,32229] [-2000,0] --> [-2115,14599] [0,2000] --> [2605,19569] [0,1000] --> [-826,3153] [-1000,0] --> [-3725,254] [0,1000] --> [-49,3931] .... [-4000,0] --> [-5688,32196] [-2000,0] --> [-2102,14581] [0,2000] --> [2618,19540] [0,1000] --> [-825,3146] [-1000,0] --> [-3729,249] [0,1000] --> [-48,3923] closing in: .. XAccel YAccel ZAccel XGyro YGyro ZGyro [-4000,-2000] --> [-5688,13276] [-2000,-1000] --> [-2102,6252] [1000,2000] --> [11084,19540] [0,500] --> [-825,1166] [-500,0] --> [-1731,249] [0,500] --> [-48,1942] .. [-4000,-3000] --> [-5688,3761] [-2000,-1500] --> [-2102,2059] [1500,2000] --> [15328,19540] [0,250] --> [-825,165] [-250,0] --> [-741,249] [0,250] --> [-48,942] .. [-3500,-3000] --> [-995,3761] [-1750,-1500] --> [-32,2059] [1500,1750] --> [15328,17458] [125,250] --> [-336,165] [-125,0] --> [-239,249] [0,125] --> [-48,439] .. [-3500,-3250] --> [-995,1373] [-1750,-1625] --> [-32,999] [1500,1625] --> [15328,16389] [187,250] --> [-90,165] [-125,-62] --> [-239,13] [0,62] --> [-48,188] .. [-3500,-3375] --> [-995,178] [-1750,-1687] --> [-32,482] [1562,1625] --> [15862,16389] [187,218] --> [-90,33] [-93,-62] --> [-109,13] [0,31] --> [-48,63] .. XAccel YAccel ZAccel XGyro YGyro ZGyro [-3437,-3375] --> [-411,178] [-1750,-1718] --> [-32,230] [1593,1625] --> [16112,16389] [202,218] --> [-29,33] [-77,-62] --> [-45,13] [15,31] --> [-1,63] .. [-3406,-3375] --> [-106,178] [-1750,-1734] --> [-32,96] [1609,1625] --> [16252,16389] [202,210] --> [-29,2] [-69,-62] --> [-14,13] [15,23] --> [-1,31] .. [-3406,-3390] --> [-106,43] [-1750,-1742] --> [-32,31] [1617,1625] --> [16319,16389] [206,210] --> [-13,2] [-69,-65] --> [-14,1] [15,19] --> [-1,15] .. [-3398,-3390] --> [-29,43] [-1746,-1742] --> [0,31] [1621,1625] --> [16355,16389] [208,210] --> [-6,2] [-67,-65] --> [-6,1] [15,17] --> [-1,7] .. [-3398,-3394] --> [-29,7] [-1746,-1744] --> [0,5] [1623,1625] --> [16372,16389] [209,210] --> [-1,2] [-66,-65] --> [-2,1] [15,16] --> [-1,3] averaging 10000 readings each time .................... XAccel YAccel ZAccel XGyro YGyro ZGyro [-3396,-3394] --> [-10,7] [-1745,-1744] --> [-14,5] [1624,1625] --> [16380,16389] [209,210] --> [-2,2] [-66,-65] --> [-2,1] [15,16] --> [0,3] .................... [-3395,-3394] --> [-9,7] [-1745,-1744] --> [-15,5] [1624,1624] --> [16380,16386] [209,210] --> [-2,2] [-66,-65] --> [-2,1] [15,16] --> [0,3] .................... [-3395,-3394] --> [-9,7] [-1745,-1744] --> [-15,5] [1624,1624] --> [16380,16385] [209,210] --> [-2,2] [-66,-65] --> [-3,1] [15,16] --> [-1,3] -------------- done -------------- |
得られたオフセットをもとに以下の
https://github.com/jrowberg/i2cdevlib/blob/master/Arduino/MPU6050/examples/MPU6050_DMP6/MPU6050_DMP6.ino
203〜206行を得られたオフセット値である以下に修正して書き込み、Processingを実行します。
|
1 2 3 4 5 6 |
mpu.setXAccelOffset(-3394); mpu.setYAccelOffset(-1744); mpu.setZAccelOffset(1624); mpu.setXGyroOffset(210); mpu.setYGyroOffset(-65); mpu.setZGyroOffset(15); |
動作(オフセット調整版)
調整により安定してセンサの姿勢が取得出来ているのがわかります。但しYaw角の初期値は絶対的なものではありません。
MPU9250
6軸センサMPU6500(3軸加速度+3軸ジャイロ)と3軸コンパスAK8963を搭載した9軸モーションセンサです。こちらもHiLetgoで購入 🙂
結論から言うと。。。うまく行きませんでした。。。MPU6050のようにDMPを使用したいい感じのプログラムがなかったので。。。
しかたないのでSparkfunによるMPU9150モジュール用の以下のプログラムを元に9軸センサから姿勢角(クォータニオン)を取得しMPU6050同様Processingのモデルを動かして見ました。(MPU9250はMPU9150を低消費電力化した上位機種とのこと)
https://github.com/sparkfun/MPU-9150_Breakout/blob/master/firmware/MPU6050/Examples/MPU9150_AHRS.ino
AHRS(エーハース)[ Attitude Heading Reference System]という電子コンパスで絶対Yaw角(方位)も出力する方式のプログラムのようです。またクォータニオン生成アルゴリズムを2種から選択できます。
以下のライブラリを使用します。
https://github.com/sparkfun/MPU-9150_Breakout/tree/master/firmware
構成
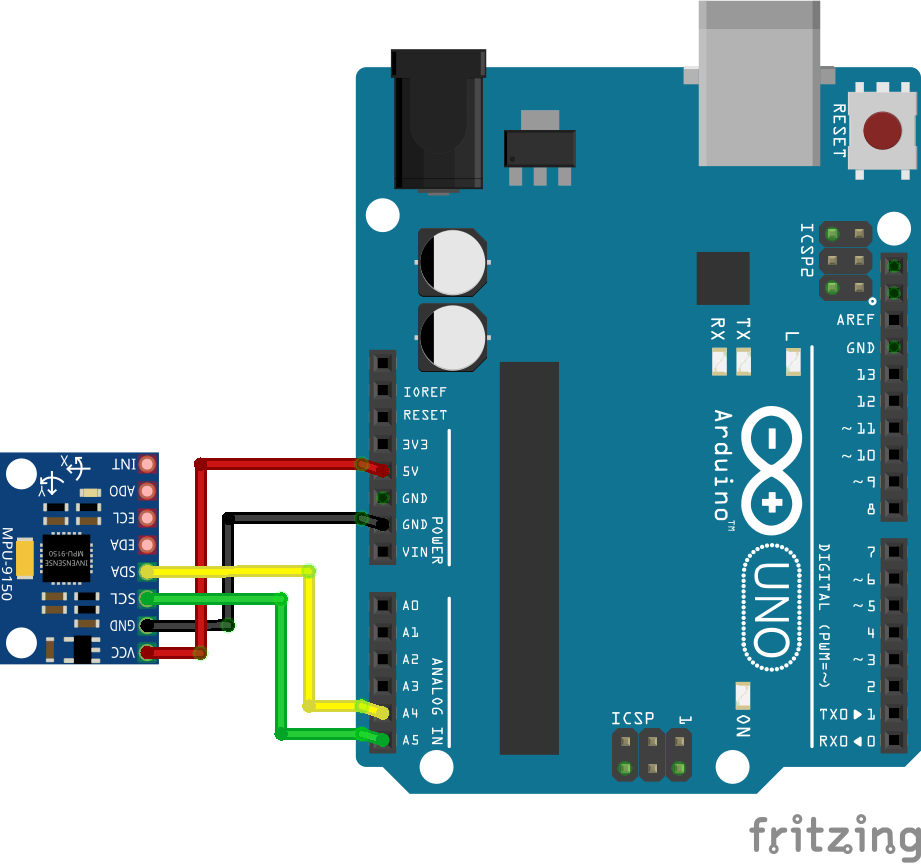
Arduinoプログラム
改造プログラム
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 |
#include <Wire.h> #include "I2Cdev.h" #include "MPU6050_9Axis_MotionApps41.h" // Declare device MPU6050 class MPU6050 mpu; // global constants for 9 DoF fusion and AHRS (Attitude and Heading Reference System) #define GyroMeasError PI * (40.0f / 180.0f) // gyroscope measurement error in rads/s (shown as 3 deg/s) #define GyroMeasDrift PI * (0.0f / 180.0f) // gyroscope measurement drift in rad/s/s (shown as 0.0 deg/s/s) #define beta sqrt(3.0f / 4.0f) * GyroMeasError // compute beta #define zeta sqrt(3.0f / 4.0f) * GyroMeasDrift // compute zeta, the other free parameter in the Madgwick scheme usually set to a small or zero value #define Kp 2.0f * 5.0f // these are the free parameters in the Mahony filter and fusion scheme, Kp for proportional feedback, Ki for integral #define Ki 0.0f int16_t a1, a2, a3, g1, g2, g3, m1, m2, m3; // raw data arrays reading uint16_t mcount = 0; // used to control display output rate uint8_t MagRate; // read rate for magnetometer data float pitch, yaw, roll; float deltat = 0.0f; // integration interval for both filter schemes uint16_t lastUpdate = 0; // used to calculate integration interval uint16_t now = 0; // used to calculate integration interval float ax, ay, az, gx, gy, gz, mx, my, mz; // variables to hold latest sensor data values float q[4] = {1.0f, 0.0f, 0.0f, 0.0f}; // vector to hold quaternion float eInt[3] = {0.0f, 0.0f, 0.0f}; // vector to hold integral error for Mahony method // packet structure for InvenSense teapot demo uint8_t teapotPacket[14] = { '$', 0x02, 0,0, 0,0, 0,0, 0,0, 0x00, 0x00, '\r', '\n' }; unsigned int qw, qx, qy, qz; void setup() { #if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE Wire.begin(); Wire.setClock(400000); // 400kHz I2C clock. Comment this line if having compilation difficulties #elif I2CDEV_IMPLEMENTATION == I2CDEV_BUILTIN_FASTWIRE Fastwire::setup(400, true); #endif Serial.begin(115200); // Start serial at 38400 bps // initialize MPU6050 device Serial.println(F("Initializing I2C devices...")); mpu.initialize(); mpu.setXAccelOffset(-5393); mpu.setYAccelOffset(-6001); mpu.setZAccelOffset(9927); mpu.setXGyroOffset(-12); mpu.setYGyroOffset(-51); mpu.setZGyroOffset(-30); // verify connection Serial.println(F("Testing device connections...")); Serial.println(mpu.testConnection() ? F("MPU9150 connection successful") : F("MPU9150 connection failed")); // Set up the accelerometer, gyro, and magnetometer for data output mpu.setRate(7); // set gyro rate to 8 kHz/(1 * rate) shows 1 kHz, accelerometer ODR is fixed at 1 KHz MagRate = 100; // set magnetometer read rate in Hz; 10 to 100 (max) Hz are reasonable values mpu.setDLPFMode(4); // set bandwidth of both gyro and accelerometer to ~20 Hz mpu.setFullScaleGyroRange(0); // set gyro range to 250 degrees/sec mpu.setFullScaleAccelRange(0); // set accelerometer to 2 g range mpu.setIntDataReadyEnabled(true); // enable data ready interrupt } void loop(){ if(mpu.getIntDataReadyStatus() == 1) { // wait for data ready status register to update all data registers mcount++; // read the raw sensor data mpu.getAcceleration ( &a1, &a2, &a3 ); ax = a1*2.0f/32768.0f; // 2 g full range for accelerometer ay = a2*2.0f/32768.0f; az = a3*2.0f/32768.0f; mpu.getRotation ( &g1, &g2, &g3 ); gx = g1*250.0f/32768.0f; // 250 deg/s full range for gyroscope gy = g2*250.0f/32768.0f; gz = g3*250.0f/32768.0f; if (mcount > 1000/MagRate) { // this is a poor man's way of setting the magnetometer read rate (see below) mpu.getMag ( &m1, &m2, &m3 ); mx = m1*10.0f*1229.0f/4096.0f + 18.0f; // milliGauss (1229 microTesla per 2^12 bits, 10 mG per microTesla) my = m2*10.0f*1229.0f/4096.0f + 70.0f; // apply calibration offsets in mG that correspond to your environment and magnetometer mz = m3*10.0f*1229.0f/4096.0f + 270.0f; mcount = 0; } } now = micros(); deltat = ((now - lastUpdate)/1000000.0f); // set integration time by time elapsed since last filter update lastUpdate = now; //クォータニオン生成アルゴリズム2種 //MadgwickQuaternionUpdate(ax, ay, az, gx*PI/180.0f, gy*PI/180.0f, gz*PI/180.0f, my, mx, mz); MahonyQuaternionUpdate(ax, ay, az, gx*PI/180.0f, gy*PI/180.0f, gz*PI/180.0f, my, mx, mz); /* Serial.print("q0 = "); Serial.print(q[0]); Serial.print(" qx = "); Serial.print(q[1]); Serial.print(" qy = "); Serial.print(q[2]); Serial.print(" qz = "); Serial.println(q[3]); */ qw =int(q[0] * 16384.0f); qx =int(q[1] * 16384.0f); qy =int(q[2] * 16384.0f); qz =int(q[3] * 16384.0f); // display quaternion values in InvenSense Teapot demo format: teapotPacket[2] = highByte(qw); teapotPacket[3] = lowByte(qw); teapotPacket[4] = highByte(qx); teapotPacket[5] = lowByte(qx); teapotPacket[6] = highByte(qy); teapotPacket[7] = lowByte(qy); teapotPacket[8] = highByte(qz); teapotPacket[9] = lowByte(qz); Serial.write(teapotPacket, 14); teapotPacket[11]++; // packetCount, loops at 0xFF on purpose } 以下 クォータニオンアルゴリズム 略 |
Processingプログラム
MPU6050と同様です。
動作
う〜んやっぱりだめだー、電子コンパスでYaw角補正してるような動きはしてるけど なんかオカシイ。。。
参考
DMP関連と思われるプログラム。。力尽きたけど今度勉強してみます。。
- https://github.com/mjs513/FreeIMU-Updates
- https://github.com/maleal/ARDUINO-MPU9250
- https://github.com/kriswiner/MPU-9250
- https://github.com/sparkfun/SparkFun_MPU-9250-DMP_Arduino_Library
あとオフセットの調整ができなかったのだけど、MPU6050とはレジスタの値が違うようです。以下を参考に修正しオフセット補正実現できましたがいい感じの姿勢角は得れませんでした。。。。
追記(2018/11/15)
Adafruit Itsy Bitsy M0 ExpressというマイコンでMPU9250 のDMP動作確認できました。よろしければご参照ください。
BNO055
9軸モーションセンサ (3軸加速度+3軸ジャイロ+3軸コンパス)。以前Adafruitで購入したものです。

国内なら以下で手に入ります。
![[商品価格に関しましては、リンクが作成された時点と現時点で情報が変更されている場合がございます。]](https://hbb.afl.rakuten.co.jp/hgb/172c3136.b1d9c714.172c3137.94857968/?me_id=1344564&item_id=10004447&m=https%3A%2F%2Fthumbnail.image.rakuten.co.jp%2F%400_mall%2Frobotshopjapan%2Fcabinet%2Fproduct_images%2Fdev%2Frbdev91.jpg%3F_ex%3D80x80&pc=https%3A%2F%2Fthumbnail.image.rakuten.co.jp%2F%400_mall%2Frobotshopjapan%2Fcabinet%2Fproduct_images%2Fdev%2Frbdev91.jpg%3F_ex%3D240x240&s=240x240&t=picttext "[商品価格に関しましては、リンクが作成された時点と現時点で情報が変更されている場合がございます。]")

詳細は以下の通り
動作
オフセット調整必要なく安定した姿勢角を出力してくれる。
中身よくわからないけど、Yaw角もうまいこと3軸コンパスとか用いて姿勢角補正してくれてるんだと思う。。。
総括
正確な姿勢角を得たいのであれば高いけどBNO055がよさそう。。。でも簡単なセンサとしてはMPU6050かなぁ安いし。。。MPU9250くやしいなぁ(T_T)



他サイト参考にしても解決できなかったことがしっかり理解できました。
ありがとうございます!