
姿勢制御検討2 ードローンへの道3ー
本記事にはアフィリエイト広告が含まれます。
前回から随分時間がかかってしまいましたが、これまでの進捗報告をさせていただきます。

目次
姿勢制御検討
前回に引き続きホバリングの実現を目指して、姿勢制御の検討を実施していました。
基本的には前回と同じコードで簡単なPID制御でパラメータ調整します。
前回はすべての軸を同じパラメータにしていましたが、
ここではx, y軸とz軸 (Yaw角) のパラメータをわけて違う値を指定するようにしました。
ガイドを設けて外部から電源供給して実験していたところ
飛行には非常に多くの電流消費があることを知りました。
5V 4AのAC電源でやっと浮いた。
だけどこのエナジーLiPoで出せるのか?#ドローンへの道 pic.twitter.com/7XZBn4yAWb
— HomeMadeGarbage (@H0meMadeGarbage) January 8, 2021
LiPoバッテリ
飛行には電流能力の大きいバッテリが必要であることが判明しましたので、以下の元気なバッテリを購入しました。
容量650mA、電流能力 39A (60C)で瞬間放電能力は78A (120C)とかなり強力です。
出力電圧も通常のLiPoバッテリより高い4.35Vなので、電圧降下でのマイコンリセットの心配も低減されます。
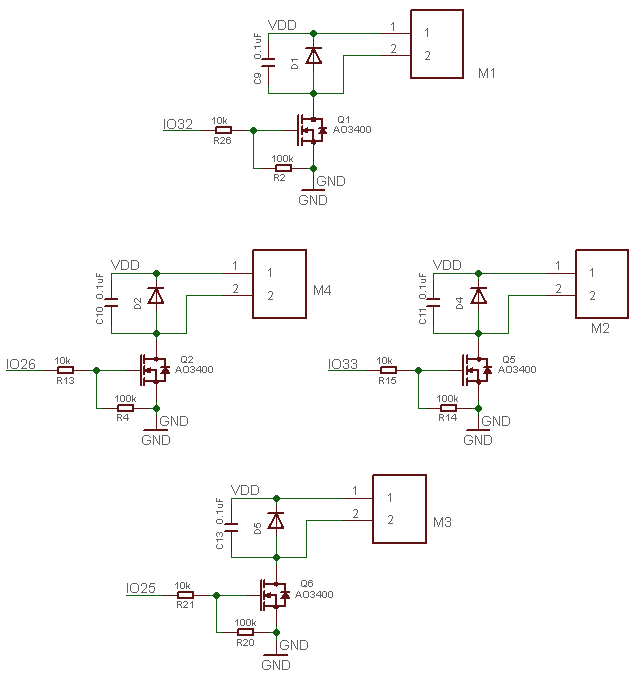
早速バッテリを積んでひもに吊るして実験しましたところ、バランスを崩してモータがひもを巻き込んでしまい過電流が流れてモータと駆動FETを1対 壊してしまいました。。。。
部品交換
交換用のFETとモータを購入しました。
FETは1月12日に注文して2月2日に着とかなり時間がかかってしまいました。
(しかしこの間にSHISEIGYO-2を完成させたり、SHISEIGYO-3を改良したりできたので非常に良い時間だったと思います。
私は色々なテーマで自身の好奇心をくすぐる生活を送っていますので、こういった部品待ちの時間は想像を深めたり俯瞰で振り返ったり寄り道したりできる貴重な時間となります。
北海道住みですのでどうしても部品の入手には時間がかかってしまいます。
私はそれをディスアドバンテージとは思っておりません。
私の好奇心とアイディアが途絶えることなくあふれ出るのは むしろコノ部品待ちの時間のおかげだと思っております。)
破損したFETを実装し直して、モータを交換しました。
トランジスタ燃えた個所
モータも故障してました。部品替えて無事 動作#ドローンへの道 再開#makerfabs #blynk pic.twitter.com/m7OVEwieVD
— HomeMadeGarbage (@H0meMadeGarbage) February 3, 2021
姿勢制御検討再開
再度 姿勢制御パラメータの再開です。
Yaw角の調整。前回コレでモータ壊したのでひもを巻き込まないように治具に工夫を凝らしました。
機体調整
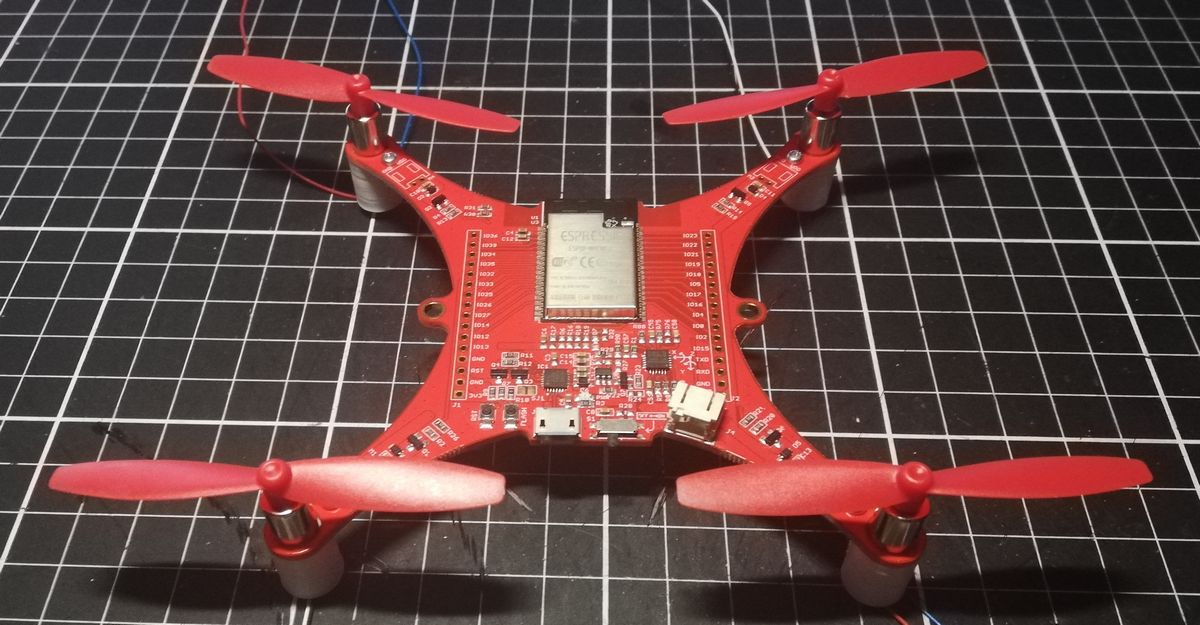
プロペラが怖いのでプロペラガードを3Dプリンタで制作して装着しました。
プロペラガード分重量が増しましたので、プロペラを若干大きいものに変更しました。
飛行実験
浮遊直前で機体が回ってしまい安定ホバリングには至っていません。
おわりに
現状はまだホバリングが実現できておりません。以下今後の予定です。
- ガードがフニャフニャで大きいプロペラだと接触することがあるので、プロペラガード再設計
- 姿勢制御パラメータ再調整
- 再調整でもホバリングできない場合はPID制御の見直し
単純なPID制御ではダメな可能性がありますので、Interface 2020年 03 月号に記載のあった2重ル―プによる制御も視野に入れないといけないかもしれません。
なかなか険しい道ですね。
それでは次の道でお会いしましょう!
次の記事

関連記事
 姿勢制御検討 ードローンへの道2ー
姿勢制御検討 ードローンへの道2ー
 ドローンへの道 爆誕 ードローンへの道1ー
ドローンへの道 爆誕 ードローンへの道1ー
 3軸 姿勢制御モジュール SHISEIGYO-3 ESP32とMPU6050の使用 ーリアクションホイールへの道22ー
3軸 姿勢制御モジュール SHISEIGYO-3 ESP32とMPU6050の使用 ーリアクションホイールへの道22ー
 3軸 姿勢制御モジュール SHISEIGYO-3 ver 1.0 完成 ーリアクションホイールへの道29ー
3軸 姿勢制御モジュール SHISEIGYO-3 ver 1.0 完成 ーリアクションホイールへの道29ー
 2軸 姿勢制御モジュール SHISEIGYO-CORE2 爆誕 ーリアクションホイールへの道30ー
2軸 姿勢制御モジュール SHISEIGYO-CORE2 爆誕 ーリアクションホイールへの道30ー
 2軸 姿勢制御モジュール SHISEIGYO-CORE2 完成 ーリアクションホイールへの道31ー
2軸 姿勢制御モジュール SHISEIGYO-CORE2 完成 ーリアクションホイールへの道31ー
 SHISEIGYO-2 Go ホイール検討 球状歯車を味見 ーリアクションホイールへの道40ー
SHISEIGYO-2 Go ホイール検討 球状歯車を味見 ーリアクションホイールへの道40ー
 一脚 屈伸ロボ 爆誕
一脚 屈伸ロボ 爆誕