
ドローン
AIエージェント Codex で ドローン2MuJoCo で シミュレーション
前回はAIエージェント Codex を活用してドローンの学習を開始しました。 https://homemadegarbage.com/drone04/ Codex先生のおかげで姿勢制御やゲームコントローラによる位置制御を数日で実現できてしまいました。 Codex先生にドローン制御コー...

AIエージェント Codex で ドローン
AIエージェント Codex を活用して車輪倒立振子の制御システム構築を成し遂げました。 https://homemadegarbage.com/codex03/ 現代技術の恩恵を十分に浴びることができたと感じました。 しかし倒立振子はいろいろなモータや構成で作りに作りまくっており、成熟した俺...

姿勢制御検討2 ードローンへの道3ー
前回から随分時間がかかってしまいましたが、これまでの進捗報告をさせていただきます。 https://homemadegarbage.com/drone02/ 姿勢制御検討 前回に引き続きホバリングの実現を目指して、姿勢制御の検討を実施していました。 基本的には前回と同じコード...
姿勢制御検討 ードローンへの道2ー
前回は Makerfabs 様よりいただいた基板 ESP32 6- Axis IMU を用いてドローン製作を決意いたしました。 https://homemadegarbage.com/drone01 ここではプロペラを制御してドローンの姿勢を制御するべく検討いたしましたので報告します。 &nb...
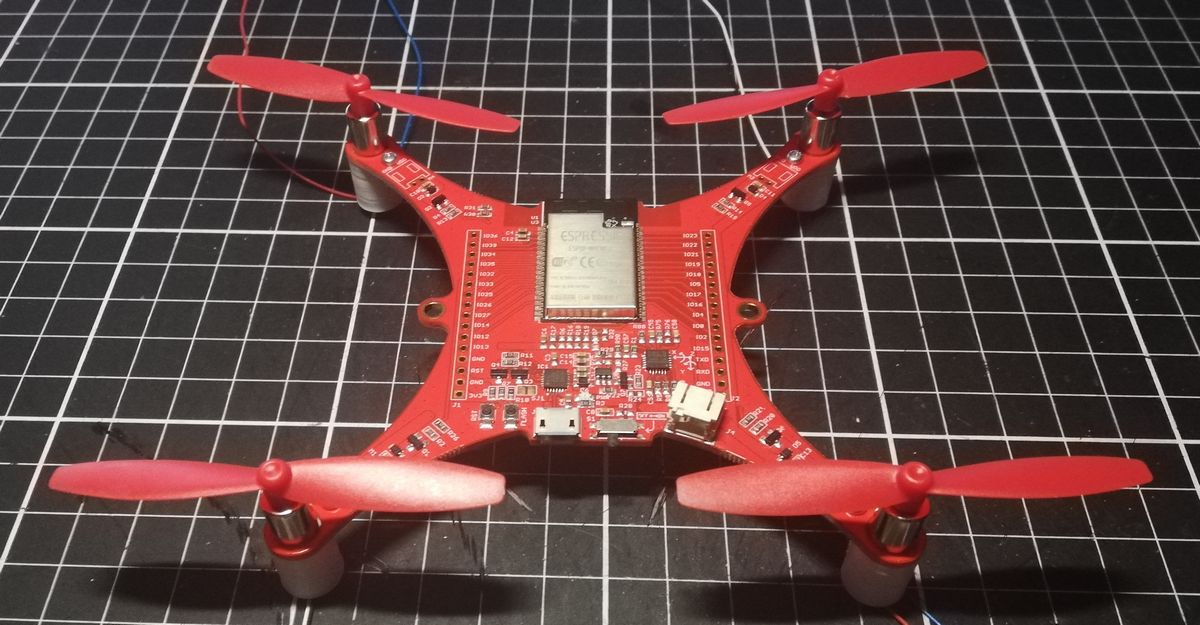
ドローンへの道 爆誕 ードローンへの道1ー
以前に Makerfabs 様より素晴らしい製品をたくさんいただきました。 いただいた製品の中に ESP32 6- Axis IMU というドローン製作にピッタリの製品がございました。 ずーっとドローンを作ってみたいなと思っておりましたので、ここに道を開通したく存じます。 ...