
POV製作
狭ピッチLEDテープを試してみた
長いこと欲しい欲しいと憧れの思いを持っていた狭ピッチのLEDテープをアリエクで見つけました。 [bc url="https://ja.aliexpress.com/item/1005006171052147.html?spm=a2g0o.order_list.order_list_main.10....
球体POVつくってみた -球体POV製作への道 その10-
先日、スリップリングを用いて姿勢制御モジュールとPOVの融合による新たな表現を検証いたしました。 https://homemadegarbage.com/reactionwheel51 ここでは姿勢制御POVの機構をそのまま流用して、長年の夢であった球体POVを作ってみました。 ...
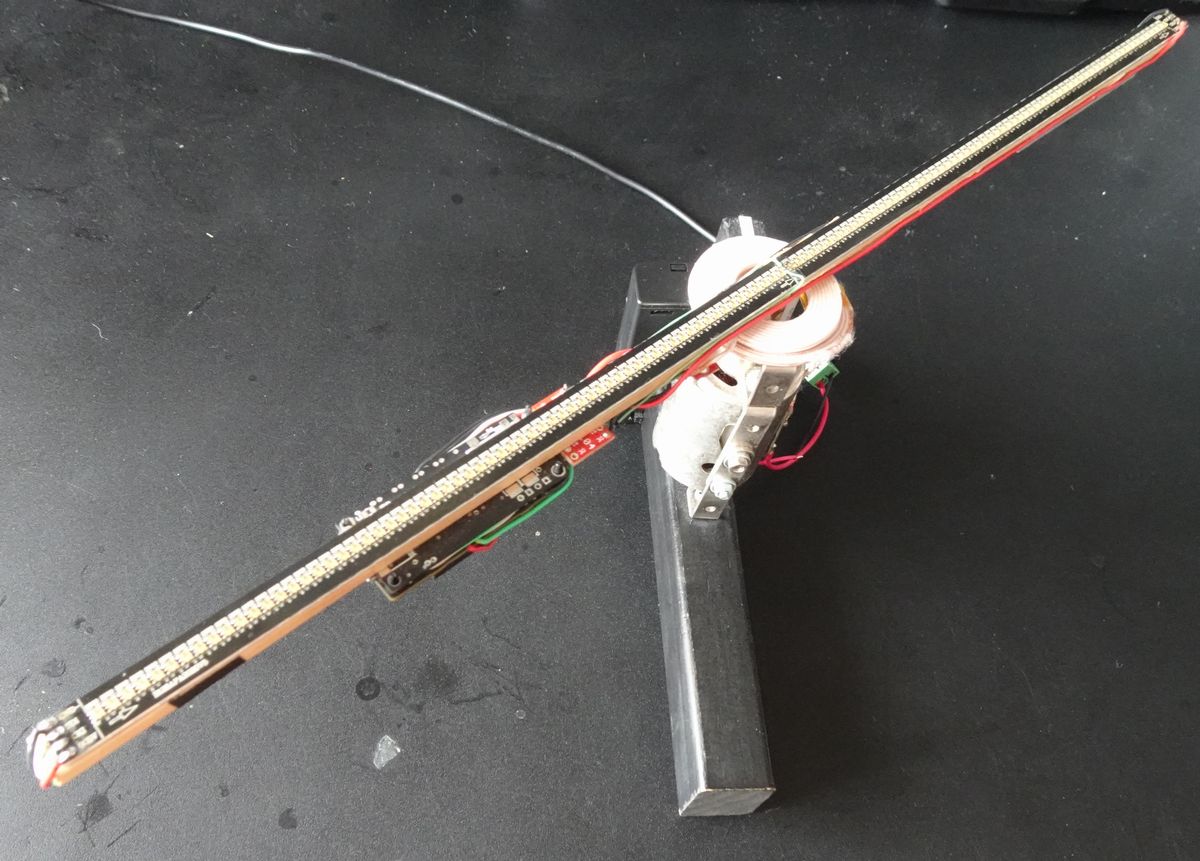
姿勢制御装置とバーサライタの融合2 ーリアクションホイールへの道51ー
前回は 1軸 姿勢制御モジュール SHISEIGYO-1のホイールにLEDをつけてバーサライタ動作させてみました。 https://homemadegarbage.com/reactionwheel50 姿勢制御モジュールのホイールはバランス状況によって正転・逆転及び...
Teensy 4.0 を楽しんでみた
Teensy 4.0を購入しました。なんと動作周波数 600MHzです。 いいおかずが来ました。 pic.twitter.com/6rH68FHKED — HomeMadeGarbage (@H0meMadeGarbage) September 7, 2019 以下...

狭ピッチ LED バーで SPRESENSE バーサライタを堪能
以前購入したじゃじゃ馬 128セルのLEDバーを用いてバーサライタしてみましたので、もう少しだけ詳しく記載いたします。 https://homemadegarbage.com/apa102-2020_01 LEDバー 使用したLEDバーはAdafruitの商品で、...
APA102-2020の再考 - バーサライタへの応用 –
さて先日購入したLEDストリップの動作に驚愕してもろもろ基本的な動作検証をしたわけですが。。。 https://homemadegarbage.com/led-freq ここではもう一度落ち着いてAPA102-2020と向き合ってみたいと思います。 そう。まさに トランキーロ!あっせんなよ ...

フルカラーLEDのリフレッシュレート
ずっとバーサライタのLED密度をあげて表示分解能を上げたいなと思っておりまして、SPI入力で2mm角のフルカラーLEDテープを探しておりました。 そうして生きておりましたらTwitterのTLで以下の商品を見かけたのです。 [bc url="https://www.adafruit.com/pr...
ハンディ バーサライタ PovRanian の使い方
ハンディ バーサライタ PovRanianの使用方法をご紹介します。 映像生成 表示映像フォームサイトでPovRanianに表示する映像データを生成します。 https://homemadegarbage.com/povranian-form01 コード生成...
ハンディ バーサライタ PovRanian の表示映像フォーム使用方法
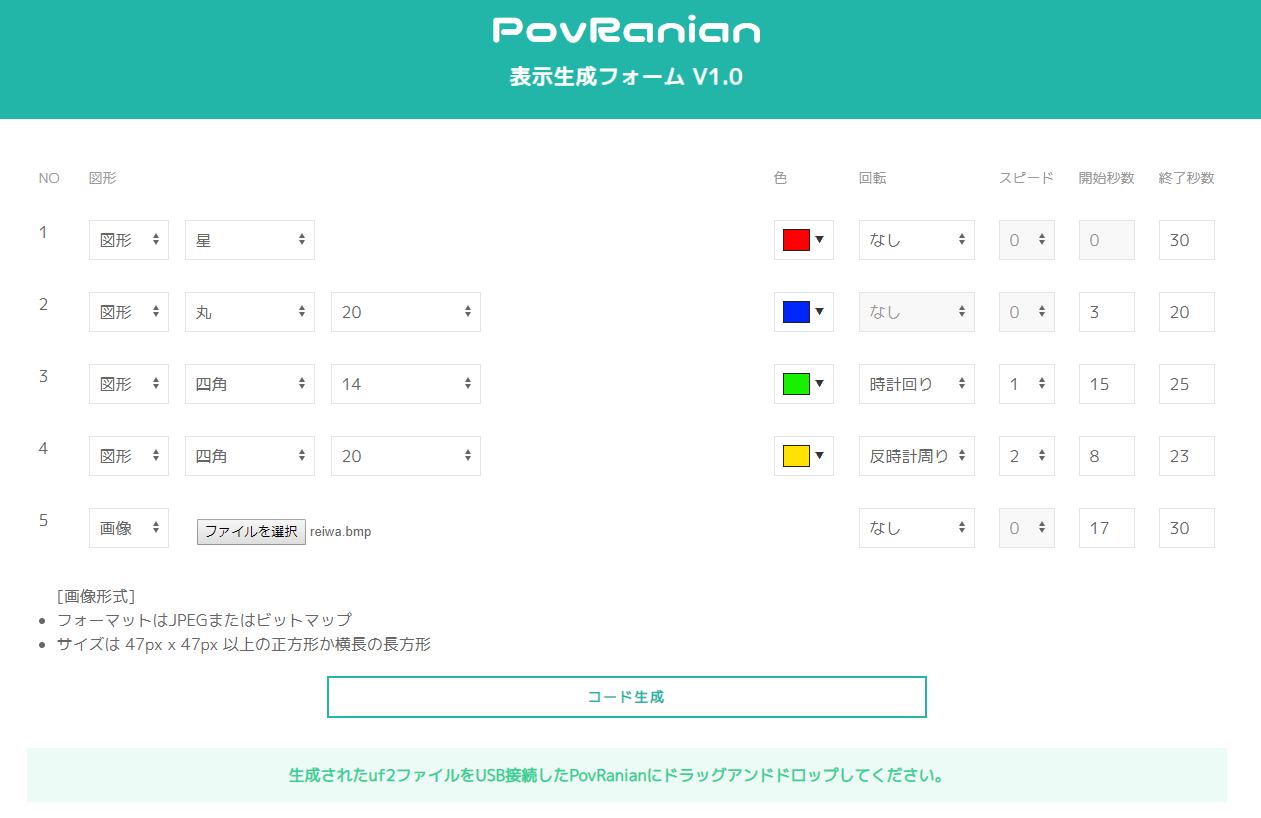
PovRanianに表示する映像データを生成するサイトの使用方法をご紹介します。 http://homemadegarbage.0t0.jp/PovRanian/ 基本操作 表示映像フォームの基本操作をご紹介します。 映像は最大で5種表示できます。 ...

ハンディ バーサライタ PovRanian の製法
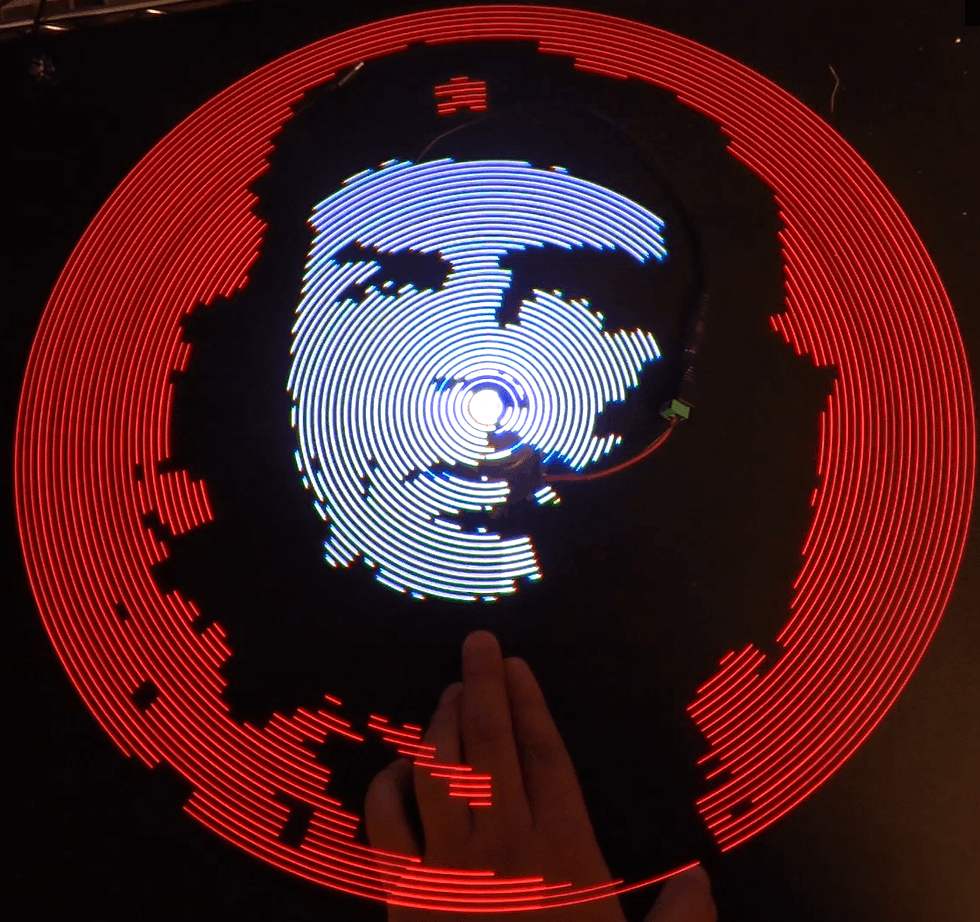
ハンディ バーサライタ PovRanian (ポブラニアン)に表示する映像を生成するサイトを立ち上げました。 画像や図形を組み合わせて空中にお好みの絵を投影できます。 ここではPovRanian 装置の製法を紹介いたします。 PovRanian表示生成フォームの使用法や Pov...

バーサライタ装置の製法
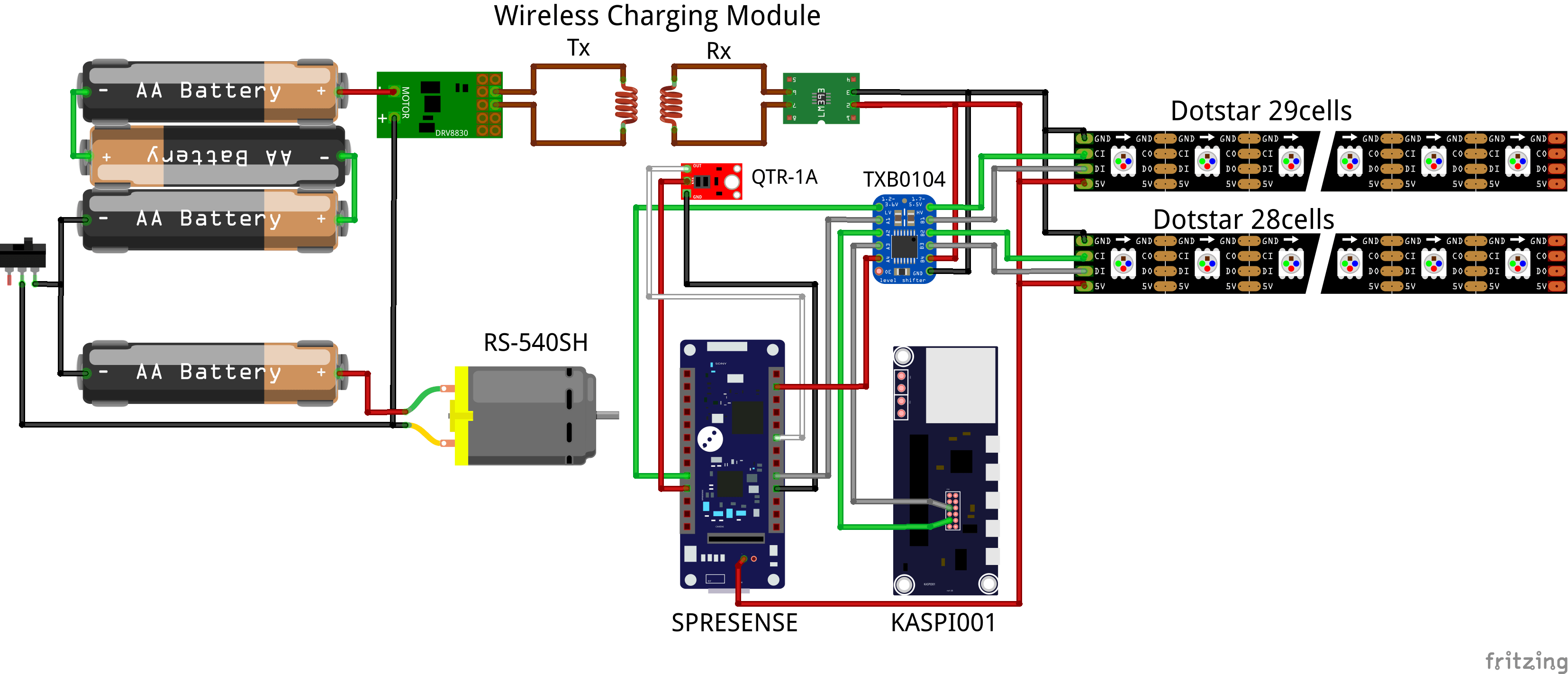
これまで作成してきたバーサライタ装置のハードの製法をざっくりと記載いたします。 HomeMadeGarbageは令和を歓迎し待ちわびています。#元号 #beautifulharmony pic.twitter.com/KhgNl0TcsH — HomeMadeGarbage (@H0me...

SPRESENSE のマルチコアプログラミングで バーサライタ
ついにSPRESENSE にArduino IDEでのマルチコアプログラミング環境が誕生しました。 [amazonjs asin="B07H2CG1HP" locale="JP" title="SONY SPRESENSE メインボード CXD5602PWBMAIN1"] 前回S...
SPRESENSE で バーサライタ
あいかわらずバーサライタ製作沼にドはまり中のお父ちゃん SonyのマイコンSPRESENSEでもバーサライタを作っておりました。 https://homemadegarbage.com/en/spresense-pov01 SPRESENSEはGPSやハイレゾオーディオコアを有する高性能マイコ...
バーサライタに映像を無線転送
前回、ESP32で割り込みやマルチタスクを駆使してバーザライタの高分解能化に成功いたしました。 https://homemadegarbage.com/pov-esp32-02 今回は画像や動画をWiFiで転送して表示に成功いたしましたのでご報告します。 UDPで...