球体POVつくってみた -球体POV製作への道 その10-
本記事にはアフィリエイト広告が含まれます。
先日、スリップリングを用いて姿勢制御モジュールとPOVの融合による新たな表現を検証いたしました。
ここでは姿勢制御POVの機構をそのまま流用して、長年の夢であった球体POVを作ってみました。
およそ6年かかった”球体POV製作への道”ついに完結です!
目次
筐体製作
6年前とは異なり、現在の私には良いブラシレスモータと素晴らしい3Dプリンタがございます。
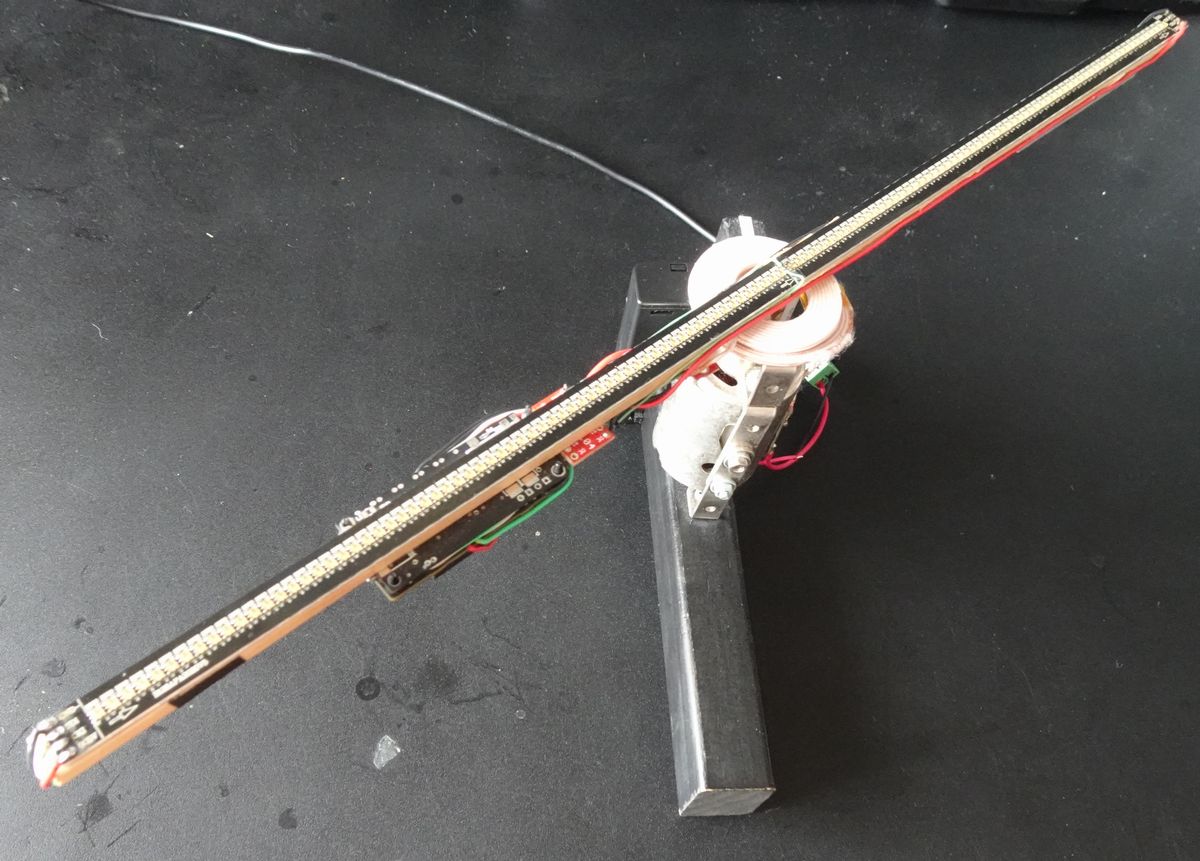
直径10cmのリングを3Dプリントし、
サポート崩壊
あともう少し頑張って pic.twitter.com/ceLJAimVzH— HomeMadeGarbage (@H0meMadeGarbage) March 11, 2022
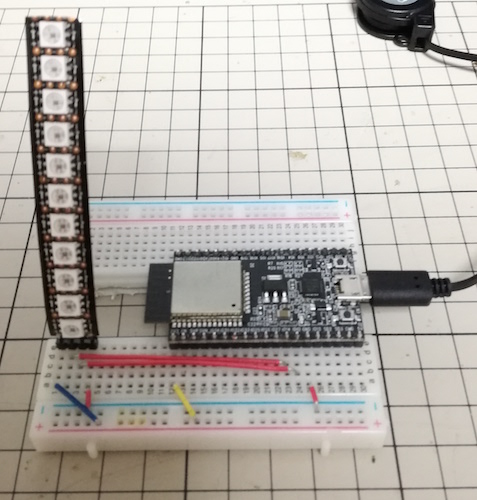
SPI LEDテープ (41セル) をリングに貼り付けて、姿勢制御POVのホイールの代わりに固定しました。

簡単に球体POVが完成してしまいました。テクノロジーの進歩を感じずにはいられません。
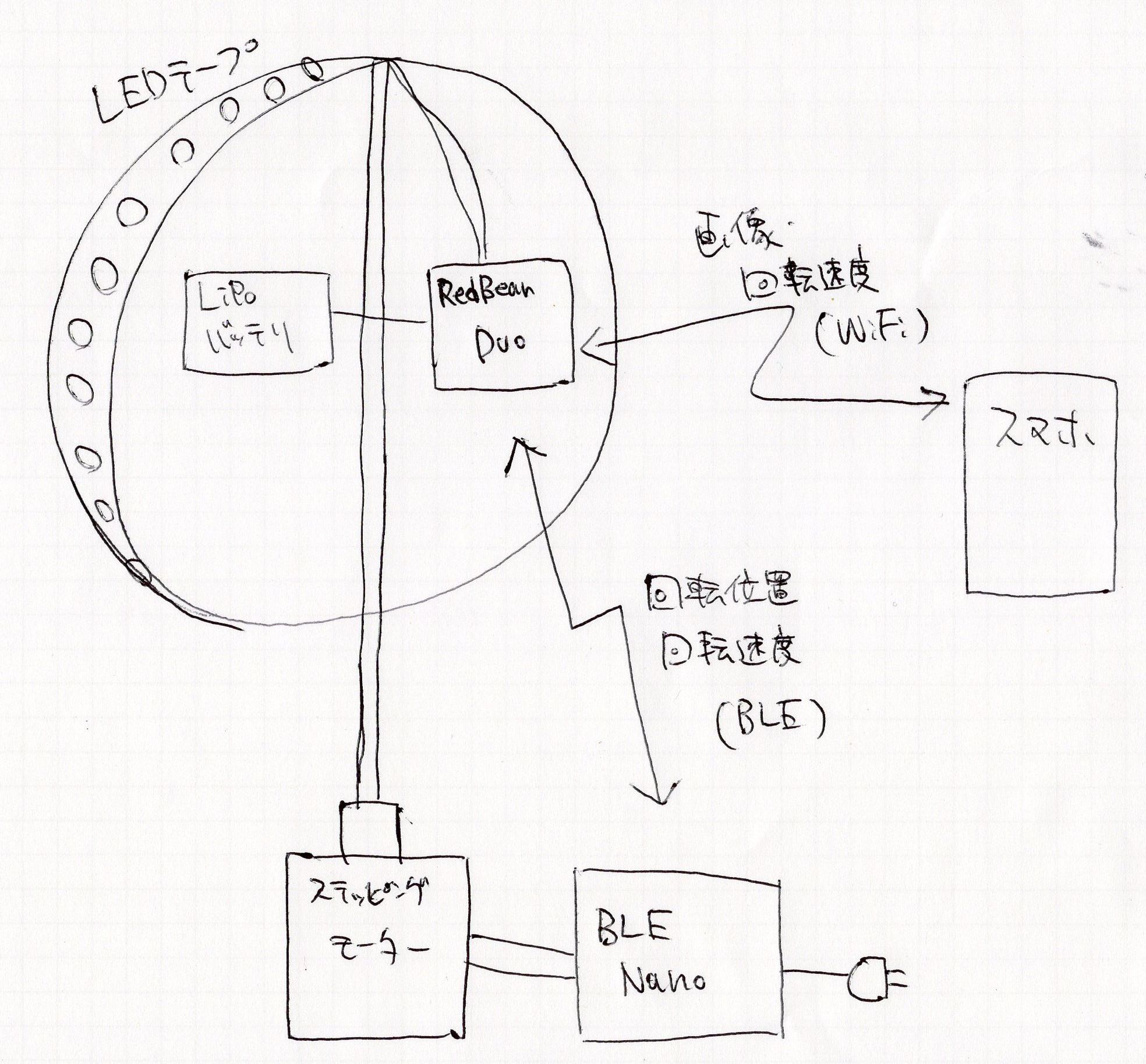
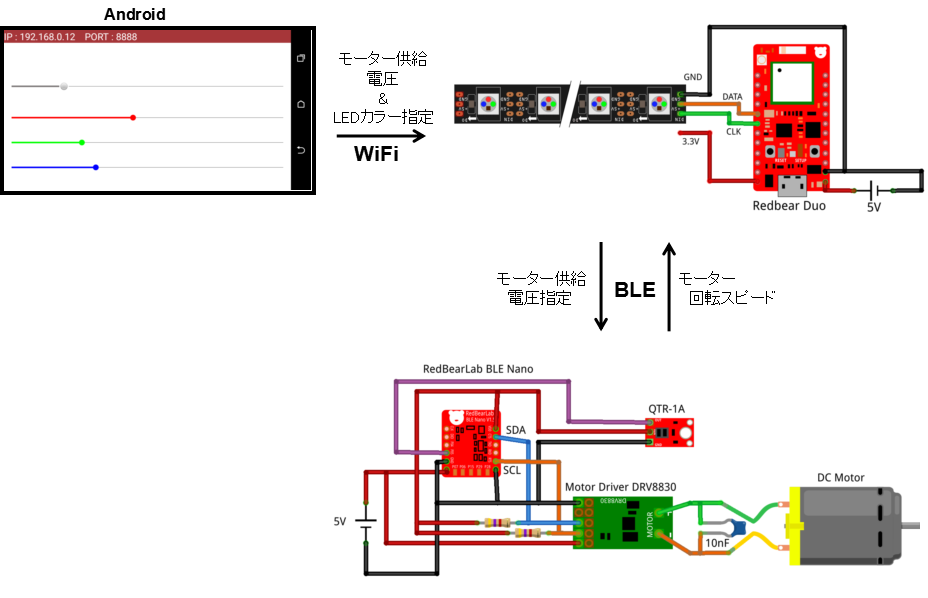
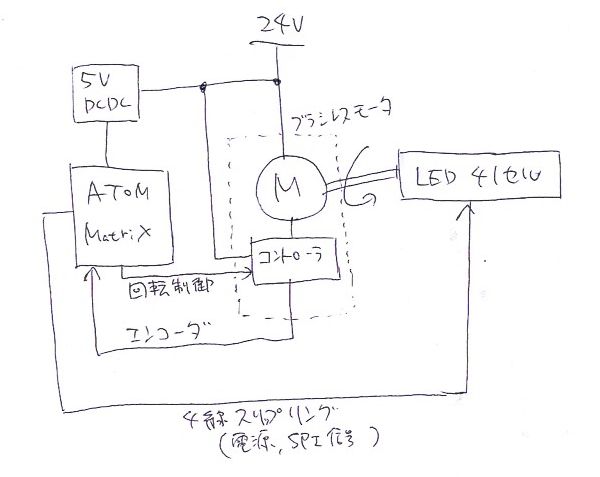
構成
[amazonjs asin=”B07VGH4XSQ” locale=”JP” title=”APA102 5050 SMD高輝度チップLEDピクセルフレキシブルストリップライトDC 5V (白 PCB, 1M 144leds IP20)”]
[amazonjs asin=”B08L7YC9TT” locale=”JP” title=”サーボモーター ミニチュア DCブラシレスサーボモーター 電気モーター 高速 デュアルチャンネル 光学式ロータリーエンコーダー 100ラインドライバー(24V)”]

球体POV動作確認
まずはリングのみを載せて回転させてみました。
3Dプリントしたリング自体は軽いので問題なく高速回転できています。
なんか神秘的で
身が引き締まる#神事 pic.twitter.com/wXE9e7bkZ1— HomeMadeGarbage (@H0meMadeGarbage) March 11, 2022
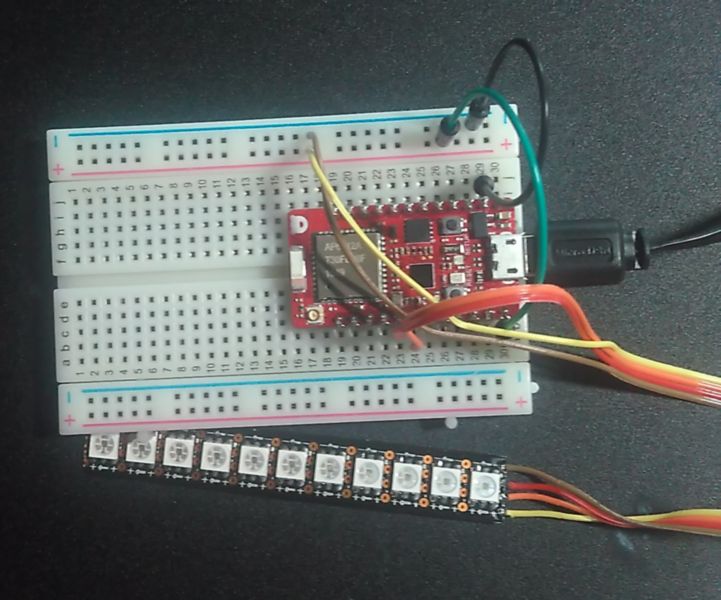
リングの片側にLED (21セル) を付けて動作確認
ブラシレスモータのエンコーダ出力 (1周 100パルス) でLEDの色を変えて表示を確認しました。
リング片側にLEDをまぶし
1周100分割でRGBY 4色で点灯神々しい pic.twitter.com/Oz3XBgxFez
— HomeMadeGarbage (@H0meMadeGarbage) March 11, 2022
問題なく1周100分割でRGBY 4色で点灯できました。
リングのもう一方に20セルのLEDを貼り付けます。他方のLEDの間にセルが配置されるように貼り付けました。
LEDをリング1周まぶす
あらいいですねぇ pic.twitter.com/O39YCZmZ93
— HomeMadeGarbage (@H0meMadeGarbage) March 11, 2022
合計で41セルのLEDとなりましたが無事に1周100分割でRGBY 4色で点灯できました。
回転速度は約1400rpmです。24V ブラシレスモータはさすがに速いです。
LEDセルを増やしたことで表示密度も向上いたしました。
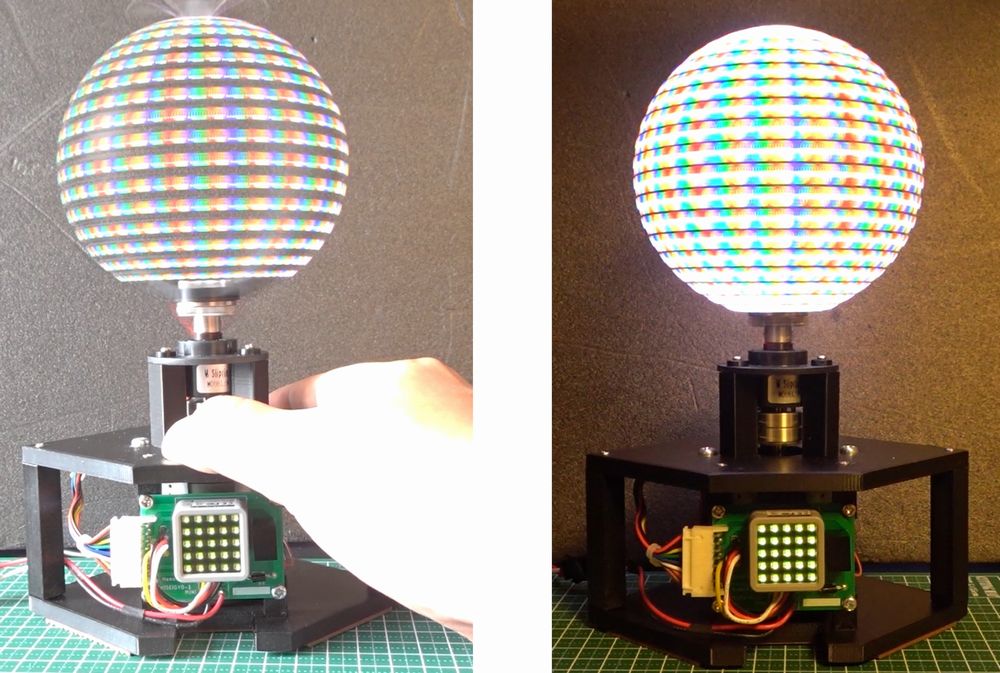
全白で表示させてLEDの位置による光の違いの有無の確認を実施しました。
LEDの場所 極に近いほど経路長が短くなるので
明るさに差が出るかと思ったけど それほどでもないな正面から見ると発光方向が傾くからいい感じに
均等になるのかもとりあえず経路長補正なしで絵だし目指すか pic.twitter.com/0B7zRGhk3F
— HomeMadeGarbage (@H0meMadeGarbage) March 11, 2022
LEDの場所 極に近いほど経路長が短くなるので 明るさに違いが出るかと思いましたが、 それほど差はありませんでした。
正面から見ると発光方向が傾くのでいい感じに 均等になっているのかもしれません。
表示画の経路長輝度補正の必要はいらないと判断しました。
動作
アスペクト比 2:1の地球の絵を表示してみました。
Equirectangular-projection.jpg
画像を100×47の画像に縮小し、各ピクセルの色を検出しLED用のファイルに変換し表示させました。
LEDセルは41ですがリング下部の接続部にはLEDがないので縦47ピクセルとしました。
球体POVでけた pic.twitter.com/CR6CbWgXoq
— HomeMadeGarbage (@H0meMadeGarbage) March 11, 2022
それほど画素数は多くないですが、なかなかきれいに表示されました!
おわりに
ここでは前回に製作した姿勢制御POVを流用して、長年の夢であった球体POVを製作しました。
約6年前に球体POV製作への道を立ち上げて頓挫しておりましたが
この間に3Dプリンタを入手しハンディーバーサライタや姿勢制御モジュールを製作し、
技能の向上と良い部品とのめぐりあわせがあり この度容易に完成させることができました。
いろんな絵を表示させてみたいのですが なかなか球体を展開した画像を用意するのは難しいものですね。
画像生成方法も検討しないといけません。
うまい棒のアイツみたいな球体を
2:1の画像に展開する良い方法ってないかしら? pic.twitter.com/Lt4Mr8RwFs— HomeMadeGarbage (@H0meMadeGarbage) March 11, 2022
追記
2022/3/13 絵の表示について
球体POVを製作されている やまたい@ものつくり さんから
球体中央は画像修正しなくてもいい感じに絵が表示できるというアドバイスをいただきました。
まあ意外と(地球でいうところの)北極・南極付近でないと、さほど歪まないので、某キャラクターだと顔部分をそのまま2:1の長方形画像の真ん中に貼り付けるだけでもそれっぽくなると思いますよ
写真のキャラは2:1の長方形に顔部分貼り付けただけで、特に変換はしてないです pic.twitter.com/nn7M3U50cu— やまたい@ものつくり (@yamatai_mk) March 12, 2022
試しにうまい棒のアイツで試してみました。
以下のように真ん中に顔を配置してアスペクト比2:1の画像にして表示してみました。

なかなかいい感じ♪
#うまい棒#やおきん pic.twitter.com/i8ULN5QujO
— HomeMadeGarbage (@H0meMadeGarbage) March 12, 2022
小学館のアイツも同様に表示
#藤子F不二雄#小学館 pic.twitter.com/NWm5xbgOhO
— HomeMadeGarbage (@H0meMadeGarbage) March 12, 2022
本当に極端な加工なしでも絵だしできますね。
色々表示させて楽しみたいと思います。