デジタルおかもち
凄い動画がTwitterにありました。
【ブログ更新】人には出来ない!?ロボット動作https://t.co/KbOMae26PV
突然ですが、縦長のモノを手の上に立て『上下左右早めに動かして』みてください!
…意外と難しいのではないでしょうか?実はその動作、ロボットアームは正確に出来るんです🤖
#調理ロボット #techblog #転職 #エンジニア採用 pic.twitter.com/RcDtQD12lt— TechMagic株式会社 (@TechMagicInc) February 9, 2022
リンクの記事によるとマジックペンを載せたロボットアームの先の台を、移動時にうまいこと傾けて倒れたり滑り落ちないようにしているとのこと
この台の制御をリアルタイムに実施しているのか、アームの移動動作に基づいてあらかじめシーケンス組んでいるのかは不明ですがいずれにしても凄いですね。
なんか自分でも試してみたくなったので動く台(デジタルおかもち)を作ってみました。
ロボットアームなど持っていないので自分の手でもって実験します。
目次
1軸おかもち
サクッと1軸で動く台を作ってみました。
サーボモータRDS3115とATOM Matrixを使用しました。
デジタルおかもち
1軸でサクッと味見
ATOM MatrixのIMUの加速度センサ値をカジュアルに加算平均して使用
これだけでなかなか味わい深いフィルタの検証や制動方法など
様々なおかずのバリエーションがありそう pic.twitter.com/Ubjrz2PPVO— HomeMadeGarbage (@H0meMadeGarbage) February 27, 2022
ATOM Matrixは持ち手の下部につけて内蔵のIMUセンサ MPU6886のセンサ値を使用しました。
上の動画ではMPU6886の加速度から傾きを計算して、10回計測した値の平均を用いてサーボを動かしています。
1軸上での重力加速度の傾き分、サーボを動かしますのでゆっくり動かせば天板は常に平行になるように動きます。
素早く動かすと加速度がかかりますので、1軸上の加速度と重力加速度のベクトル和の方向と垂直になるように天板が傾きます。
2軸おかもち
サーボモータRDS3115を追加して2軸にしました。
1軸の時と直行する傾き検出を追加して2個目のサーボを制御します。
デジタルおかもち
2軸にした
加速度センサ値の加算平均で
カジュアルな着こなし pic.twitter.com/AofGfk2swP— HomeMadeGarbage (@H0meMadeGarbage) February 28, 2022
これで常に平行を保とうとする台が完成しましたので、さっそく物を載せてみました。
— HomeMadeGarbage (@H0meMadeGarbage) March 1, 2022
持ち手を傾けても天板は平行に保たれておりますが、加速移動時になんか挙動がおかしいです。
よくよく考えてみると持ち手を傾けた際に天板とセンサは違う方向を向いており、移動時の加速度がかかる方向が違いました。
センサの位置がまずいですね。
天板にセンサ移動
ATOM Matrixを持ち手の底面から天板に移動しました。
— HomeMadeGarbage (@H0meMadeGarbage) March 1, 2022
おかもちの座標は以下のとおり。
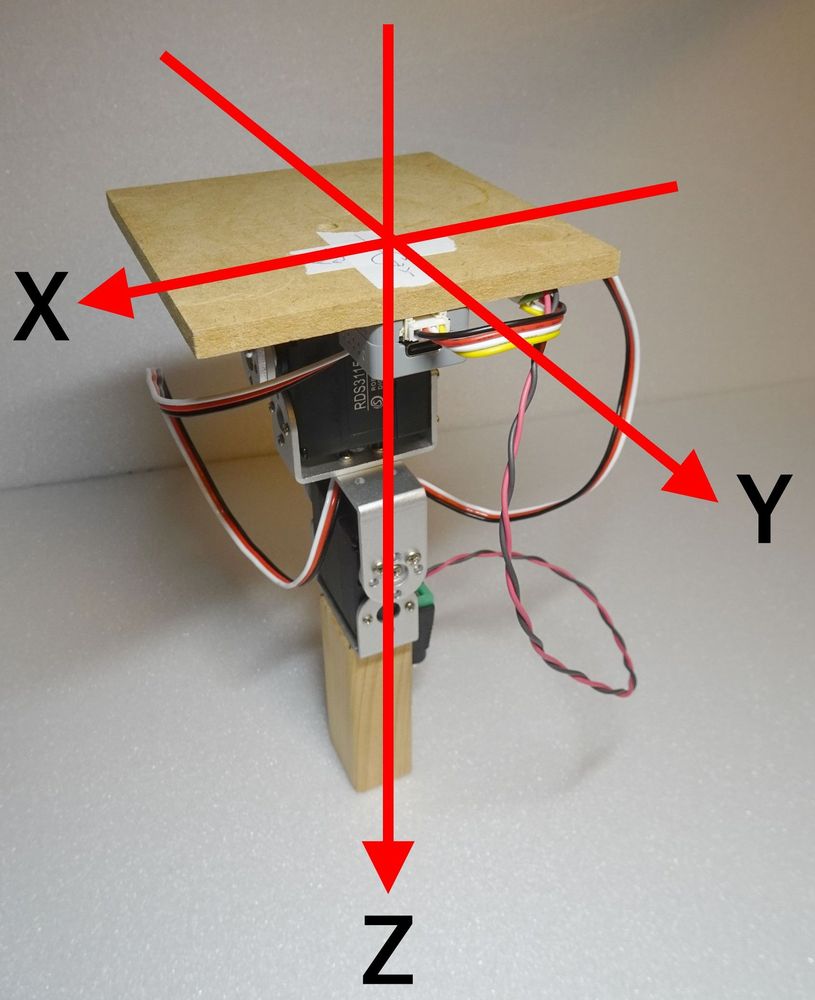
ATOM MatrixのIMUの加速度(acc)と角速度(gyro)のセンシング値を用いて
以下のようにX軸、Y軸のサーボの角度($θ$)を制御して天板水平方向の加速度がゼロになるように制御しています。
$$θ_X = θ_{X-1} + {Kp}_X × {acc_Y} + {Kd}_X × {gyro_X} $$
$$θ_Y = θ_{Y-1} + {Kp}_Y × {acc_X} – {Kd}_Y × {gyro_Y} $$
$$ 但し、θ_{X-1}, θ_{Y-1}:直前に算出した角度、 Kp, Kd:係数$$
これによって持ち手が傾いても天板は平行になるようにサーボが動き、移動時には加速度と重力加速度のベクトル和の方向に対して常に垂直になるように天板が傾くという魂胆です。
しかし、はやく移動させると積載物は落ちてしまいました。
常に天板の水平方向の加速度がゼロになるように
天板を傾ければ積載物が滑ることはないはずだけど早くすると追い付かない pic.twitter.com/MOCuctfYfa
— HomeMadeGarbage (@H0meMadeGarbage) March 1, 2022
サーボの応答が遅いのか
制御が遅いのか
そもそも制御の思想自体が誤っているのか
手で持って移動させているのが悪いのか(実際サーボの移動に影響されてリンギングすることもあった)
色々原因が考えられますが完ぺきなる おかもち は実現できませんでした。
おわりに
ロボットアームによるペンの移動に感化され、デジタルおかもちを製作してみました。
結果的には成功しませんでしたが、いつかロボットアームを手に入れたら先端に本機構のおかもちを取り付けて再検討実施したいです。
#テクノロジーの味見 pic.twitter.com/p3SbBb1QUn
— HomeMadeGarbage (@H0meMadeGarbage) March 1, 2022