メカナムホイール
Home >
メカナムホイールでLEGOラジコンカー製作
DFRobot様よりメカナムホイールをいただきましたので、ラジコンカーを製作してみました。 [bc url="https://www.dfrobot.com/product-2041.html"] 思想 非常によいメカナムホイールが手に入ったので、これをどう利用し...
電子工作 2021.1.3 お父ちゃん ![]()
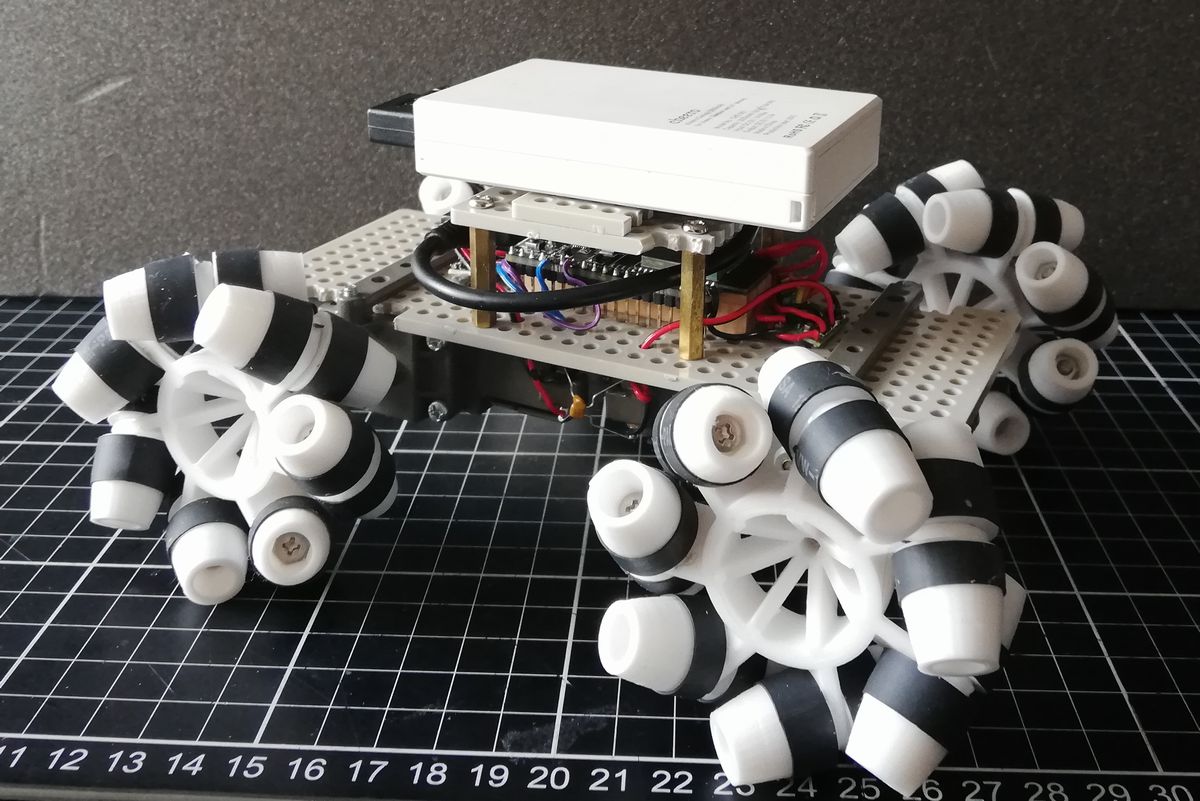
3Dプリンタでメカナムホイールを堪能
凄いものを見つけてしましました。 [bc url="https://www.thingiverse.com/thing:1203230"] なんと憧れのメカナムホイールの3Dプリンタ用データを公開されている方がいたのです! 動画もありすごくいい感じに動いてる!これはプリントする...
電子工作 2019.12.29 お父ちゃん ![]()