メカナムホイールでLEGOラジコンカー製作
本記事にはアフィリエイト広告が含まれます。
DFRobot様よりメカナムホイールをいただきましたので、ラジコンカーを製作してみました。

目次
思想
非常によいメカナムホイールが手に入ったので、これをどう利用しようかとウキウキで考えました。
長男くん![]() はずっとLEGOが大好きで毎日いろいろ製作しています。
はずっとLEGOが大好きで毎日いろいろ製作しています。
そこで、折角ですのでLEGOで色々カスタマイズできるラジコンにしようと思います。
構成
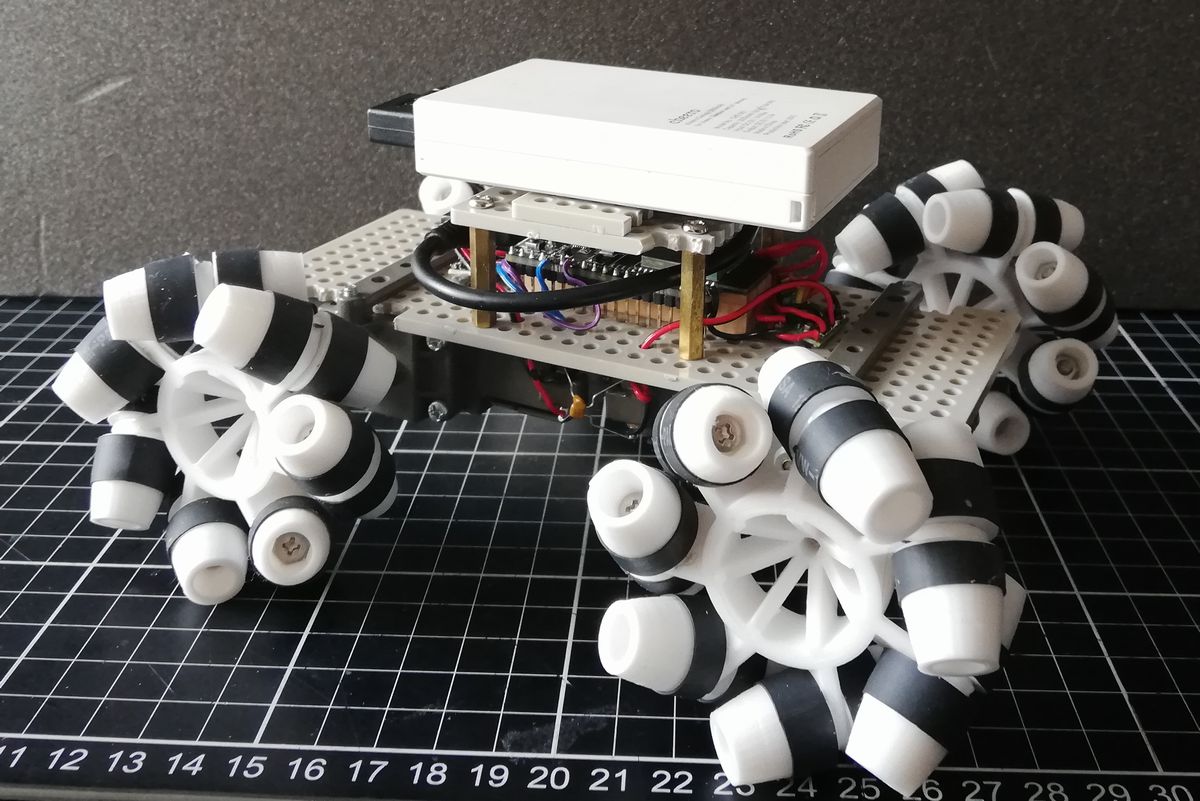
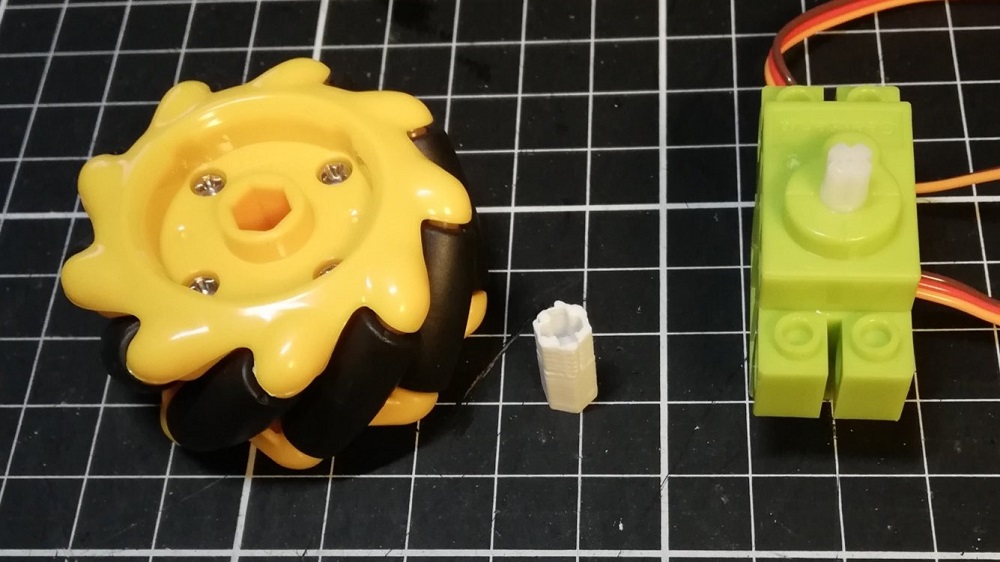
メカナムホイールはレゴを接続できる360°回転サーボで回すことにしました。

サーボとしても低価格で非常に良い買い物をしました♪
ホイールとサーボの接続のために3Dプリンタで治具を製作しました。

M5StickCとM5StickC 8Servos Hatによるビークル制御は以前試しているので慣れたものです。
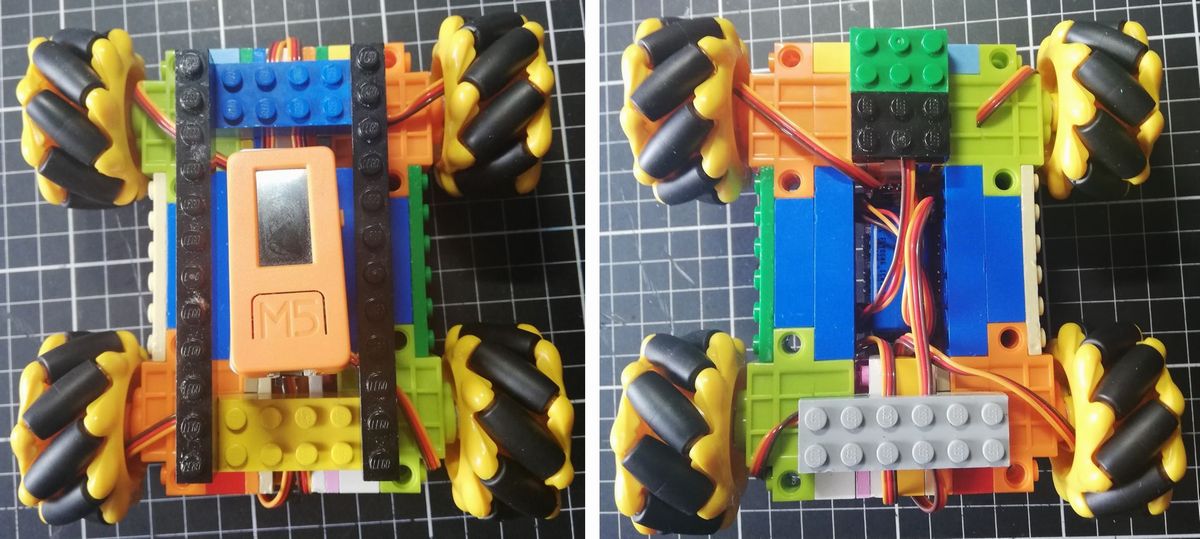
車体
車体はLEGOで構築しました。
Blynk設定
ここではスマホアプリのblynkでBLE通信で車体を動かします。
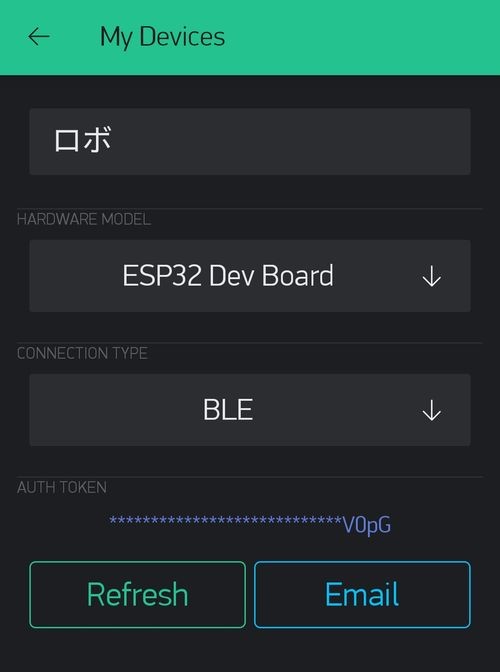
新規プロジェクトを作成します。ハードウェアはESP32 Dev Boardを選択。Conection TypeにはBLEを指定します。
AUTH TOKENはArduinoコード生成時に使用します (アカウント登録したメールに送信されます)。

ウィジェットとしてBLEウィジェットとNumeric InputウィジェットとJoystickウェジットを配置します。
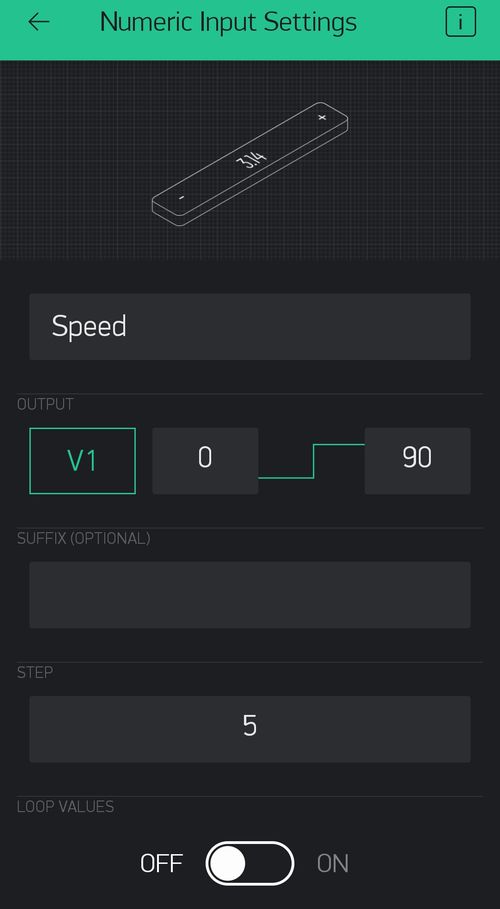
Numeric InputウェジットはV1を使用します。
メカナムホイールの回転速度を決定します (0~90)。
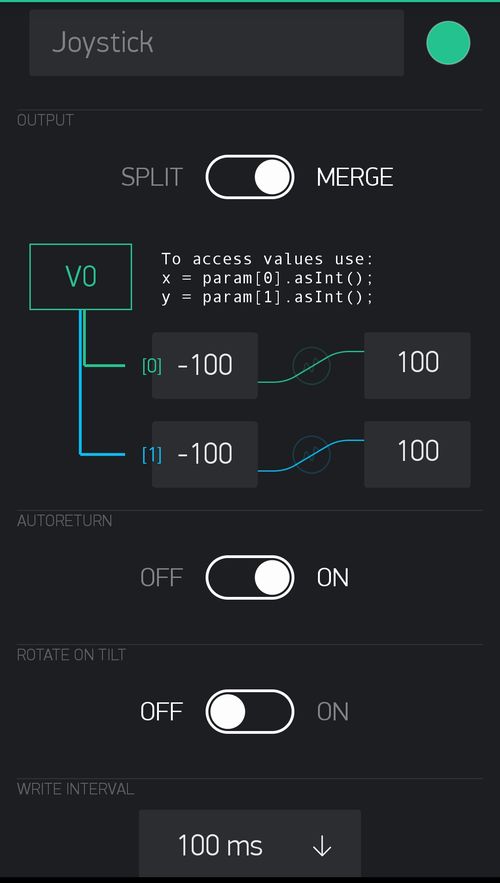
JoystickウェジットはバーチャルピンV0を使用します。
ジョイスティックの設定はx軸とy軸の出力をMERGEしてヴァーチャルピンV0に出力させ、それぞれ値は-100~100としました。
AUTO RETURNはONにしてジョイスティックはタップ移動後離すと自動的に中央に戻します。
ROTATE ON TILTはOFFにてスマホの回転に依存せずのx, y軸を固定とします。
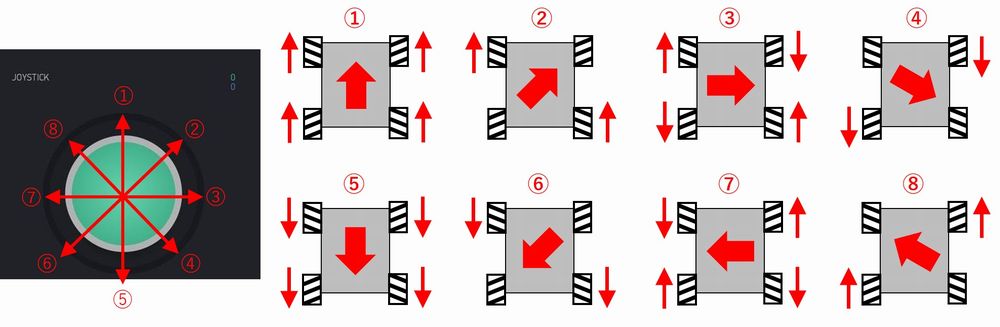
メカナムホイール動作
Arduinoコード
ジョイスティックのx, y値をM5StickCで受けて角度に変換してディスプレイ表示しています。
角度のディスプレイ表示は以下のM5StickCのサンプルコードTFT_Pie_Chartを利用しました。
8Servos Hatのサンプルコードを元に制御しております。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 |
#define BLYNK_PRINT Serial #define BLYNK_USE_DIRECT_CONNECT #include <M5StickC.h> #include "IIC_servo.h" #include <BlynkSimpleEsp32_BLE.h> #include <BLEDevice.h> #include <BLEServer.h> // You should get Auth Token in the Blynk App. // Go to the Project Settings (nut icon). char auth[] = "BlynkアプリのYourAuthTokenを入力"; int x = 0, y = 0; int thFL, thFR, thRL, thRR; float th = 0.0; int stopValue = 90; int Speed = 30; #define DEG2RAD 0.0174532925 byte inc = 0; unsigned int col = 0; //ヴァーチャルピンV0 BLYNK_WRITE(V0) { x = param[0].asInt(); y = param[1].asInt(); th = atan2(y,-x) *180.0/M_PI; if(th < 0){ th += 360; } Serial.print("th : "); Serial.println(th); fillSegment(40, 80, 0, 360, 35, TFT_BLACK); } BLYNK_WRITE(V1) { Speed = param.asInt(); Serial.print("Speed : "); Serial.println(Speed); } void setup(){ // Debug console Serial.begin(115200); Serial.println("Waiting for connections..."); Blynk.setDeviceName("Blynk"); Blynk.begin(auth); M5.begin(); M5.Axp.ScreenBreath(10); M5.Lcd.fillScreen(TFT_BLACK); M5.Lcd.println(" "); M5.Lcd.println(" Power ON"); IIC_Servo_Init(); //sda 0 scl 26 Servo_angle_set(1,stopValue); Servo_angle_set(4,stopValue); Servo_angle_set(5,stopValue); Servo_angle_set(8,stopValue); while(Blynk.connect() == false){ Serial.print("."); } M5.Lcd.print(" BLE Connect"); } void loop(){ Blynk.run(); if(x != 0 && y != 0){ fillSegment(40, 80, int(th) - 90, 5, 35, TFT_GREEN); //前進 if(th > 70.0 && th < 110.0){ thFL = stopValue + Speed; thFR = stopValue - Speed; thRL = stopValue + Speed; thRR = stopValue - Speed; //後進 }else if(th > 250.0 && th < 290.0){ thFL = stopValue - Speed; thFR = stopValue + Speed; thRL = stopValue - Speed; thRR = stopValue + Speed; //左 }else if(th > 340.0 || th < 20.0){ thFL = stopValue - Speed; thFR = stopValue - Speed; thRL = stopValue + Speed; thRR = stopValue + Speed; //右 }else if(th > 160.0 && th < 200.0){ thFL = stopValue + Speed; thFR = stopValue + Speed; thRL = stopValue - Speed; thRR = stopValue - Speed; //左上 }else if(th > 25.0 && th < 65.0){ thFL = stopValue; thFR = stopValue - Speed; thRL = stopValue + Speed; thRR = stopValue; //左下 }else if(th > 295.0 && th < 335.0){ thFL = stopValue - Speed; thFR = stopValue; thRL = stopValue; thRR = stopValue + Speed; //右上 }else if(th > 115.0 && th < 155.0){ thFL = stopValue + Speed; thFR = stopValue; thRL = stopValue; thRR = stopValue - Speed; //右下 }else if(th > 205.0 && th < 245.0){ thFL = stopValue; thFR = stopValue + Speed; thRL = stopValue - Speed; thRR = stopValue; //停止 }else{ thFL = stopValue; thFR = stopValue; thRL = stopValue; thRR = stopValue; } Servo_angle_set(8, thFL); Servo_angle_set(4, thFR); Servo_angle_set(5, thRL); Servo_angle_set(1, thRR); }else{ fillSegment(40, 80, 0, 360, 35, TFT_BLACK); Servo_angle_set(1,stopValue); Servo_angle_set(4,stopValue); Servo_angle_set(5,stopValue); Servo_angle_set(8,stopValue); } } // ######################################################################### // Draw circle segments // ######################################################################### // x,y == coords of centre of circle // start_angle = 0 - 359 // sub_angle = 0 - 360 = subtended angle // r = radius // colour = 16 bit colour value int fillSegment(int x, int y, int start_angle, int sub_angle, int r, unsigned int colour) { // Calculate first pair of coordinates for segment start float sx = cos((start_angle - 90) * DEG2RAD); float sy = sin((start_angle - 90) * DEG2RAD); uint16_t x1 = sx * r + x; uint16_t y1 = sy * r + y; // Draw colour blocks every inc degrees for (int i = start_angle; i < start_angle + sub_angle; i++) { // Calculate pair of coordinates for segment end int x2 = cos((i + 1 - 90) * DEG2RAD) * r + x; int y2 = sin((i + 1 - 90) * DEG2RAD) * r + y; M5.Lcd.fillTriangle(x1, y1, x2, y2, x, y, colour); // Copy segment end to sgement start for next segment x1 = x2; y1 = y2; } } // ######################################################################### // Return the 16 bit colour with brightness 0-100% // ######################################################################### unsigned int brightness(unsigned int colour, int brightness) { byte red = colour >> 11; byte green = (colour & 0x7E0) >> 5; byte blue = colour & 0x1F; blue = (blue * brightness)/100; green = (green * brightness)/100; red = (red * brightness)/100; return (red << 11) + (green << 5) + blue; } |
動作
レゴカーできた。
あとは長男くんに好きにカスタマイズいただこう。#レゴ #LEGO #Blynk #メカナムホイール pic.twitter.com/1aFs8EihGW— HomeMadeGarbage (@H0meMadeGarbage) January 3, 2021
おわりに
憧れのメカナムホイールを用いてレゴカーができました!
あとは長男くん![]() に自由にカスタマイズしていただきましょう。
に自由にカスタマイズしていただきましょう。