HuskyLens で ロボットを遠隔操作 ー二足歩行ロボットへの道7ー
本記事にはアフィリエイト広告が含まれます。
前回はコントローラで二足歩行ロボットの全身を遠隔操作し、モーションの記録・再生を可能としました。
ここでは、少し寄り道をしてAIカメラ HuskyLensを用いてロボットの遠隔動作を試してみました。
目次
Tag Recognition
HuskyLensのタグ認識機能を使ってロボットの関節角度を導出してみます。
HuskyLensは以下のタグを認識できます。
ロボット用コントローラの関節にタグ(8個)を貼り付けてみました。
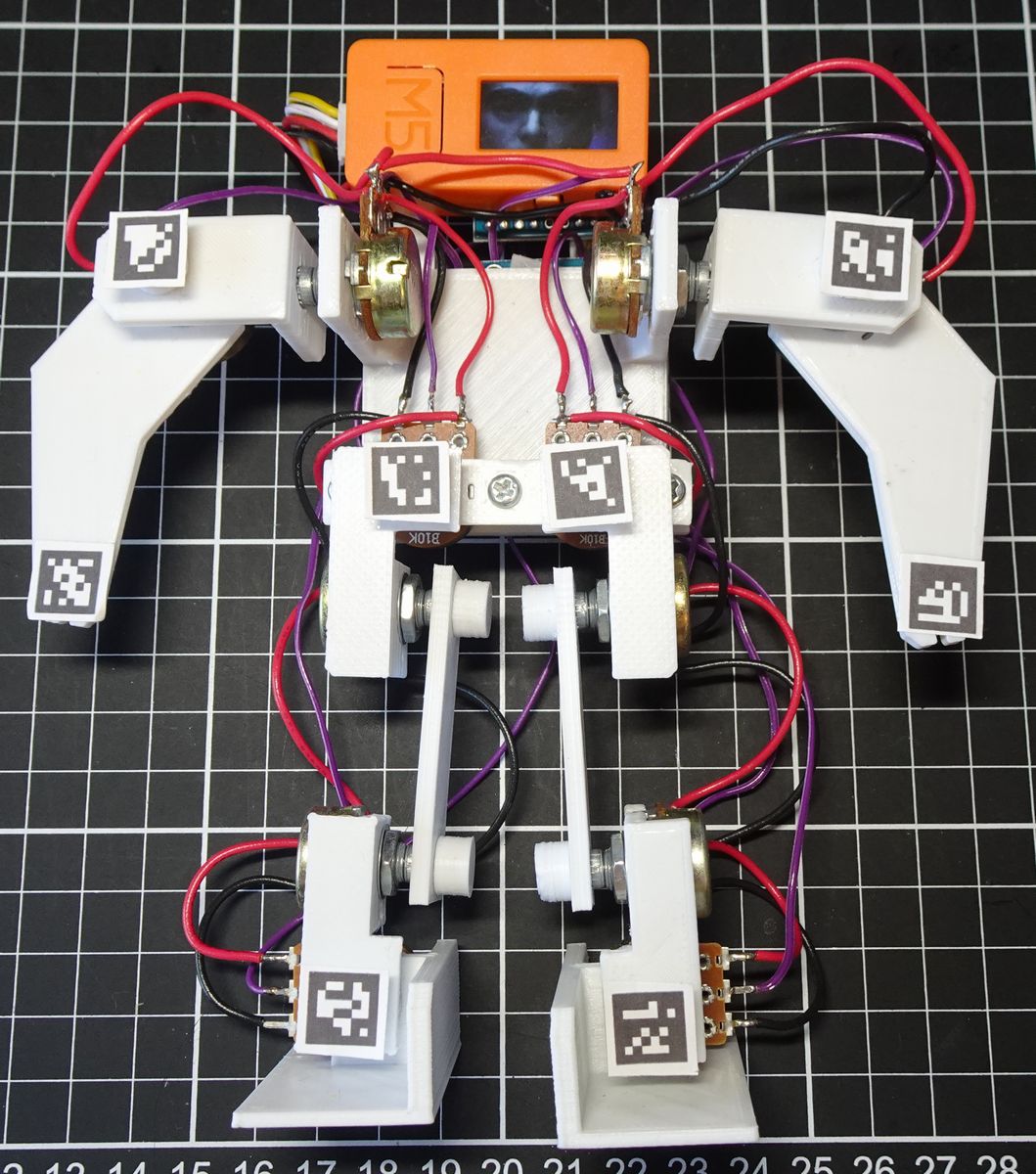
HuskyLensでタグを認識し、座標から関節の角度を導出します。
HuskyLens Tag Recognition pic.twitter.com/JWjQWajGsF
— HomeMadeGarbage (@H0meMadeGarbage) July 19, 2021
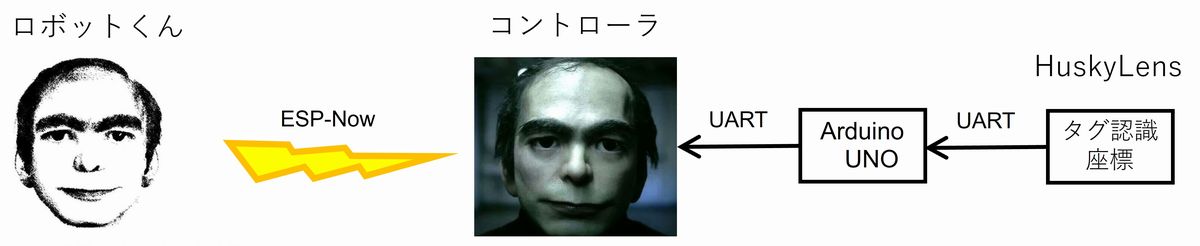
構成
HuskyLensでコントローラのタグを認識し、座標から関節角度を導出します。
導出した角度をArduino UNOを介してコントローラのM5StickCにシリアルで転送します。
参考
動作
腕の2個のタグの座標から角度を導出して、腕を動かしてみました。
ちょっと寄り道して
AIカメラ #HuskyLens でロボット遠隔操作してみた。#AI #ロボティクス#とってもロボットくん pic.twitter.com/YwvnSPI50X— HomeMadeGarbage (@H0meMadeGarbage) July 19, 2021
おわりに
ここでは画像認識でロボットを遠隔する可能性を確かめることができました。
次回は本題に戻って二足歩行ロボットの動作を学びたいと思います。
それでは次の道でお会いしましょう!