MIDIコントローラでモーション制御 ー二足歩行ロボットへの道3ー
本記事にはアフィリエイト広告が含まれます。
前回は書籍を参考に各種モーションを楽しみました。
各モーションは凄くよくできていたのですが、調整が必要であったことと
二足歩行ロボットをより理解するために、ここではMIDIコントローラでサーボモータをひとつひとつ制御できるようにしました。
目次
MIDIコントローラ
以下のようにMIDIコントローラで各サーボをグリグリ動かせるようにしました。
これで二足歩行ロボットが何たるかを
知りたい#とってもロボットくん#KORG #m5stack pic.twitter.com/Px7NLUNJqI— HomeMadeGarbage (@H0meMadeGarbage) June 21, 2021
構成
構成は以下の通りです。
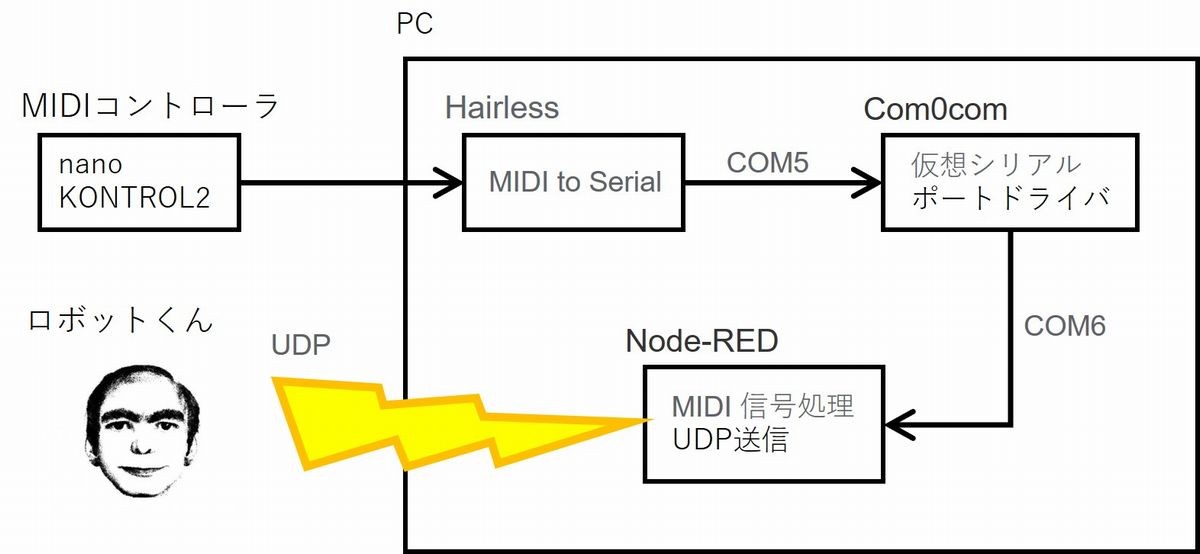
MIDIコントローラにはnanoKONTROL2 を使用しました。
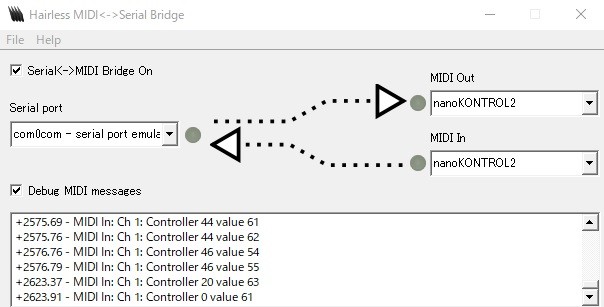
MIDIコントローラからのMIDI信号をMIDI-シリアルソフトHairless で変換します。
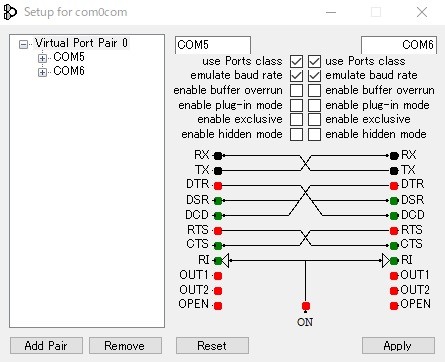
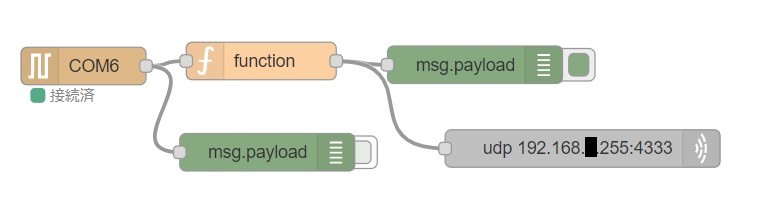
変換した信号をCom0comを用いてCOMポートとして出力します。
Node-REDでシリアルをうけてMIDIのch、ベロシティをUDPでブロードキャストします。
UDP信号をロボット(M5StickC Plus)で受信してサーボを動かします。
動作
各サーボの角度をM5StickC Plusのディスプレイに表示するようにしました。
各サーボの角度を表示できるようにしたのに
そんな顔しないで#とってもロボットくん#KORG #m5stack pic.twitter.com/uJ2vJsOgRY— HomeMadeGarbage (@H0meMadeGarbage) June 23, 2021
片足立ちに挑戦
おわりに
ここではMIDIコントローラで各サーボを制御できるようにして、自由に動かせるようにしました。
ポーズはとれるようになったので、次はモーションに挑戦したいと考えております。
それでは次の道でお会いしましょう!